Técnicas de inteligencia artificial. Visión Artificial Extracción de características
|
|
|
- Ana Belén Sánchez Ramírez
- hace 6 años
- Vistas:
Transcripción
1 Técnicas de inteligencia artificial Visión Artificial Extracción de características
2 Indice Transformada de Hough Características: SIFT
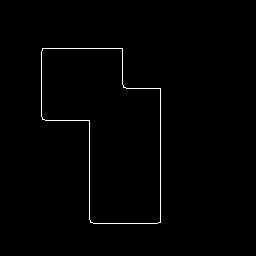
3 Transformada de Hough Fundamentos: Motivación: Desarrollar técnicas que permitan identificar primitivas geométricas sencillas (líneas, círculos, cuadrados.) en la imagen (p.e. tras binarizar el resultado de Canny). Mecanismo: Espacio paramétrico. Los valores de los parámetros de la ecuación paramétrica definen unívocamente a cada primitiva. Por cada parámetro tenemos una dimensión en el espacio paramétrico y cada dimensión se discretiza en celdas. Proceso de votación. Cada punto de la imagen votará por aquella ecuación (combinación de parámetros, o celda) que cumpla. Daremos como salida las celdas con suficiente soporte o evidencia, esto es, aquellas con un número suficiente de votos.

4 Transformada de Hough Transformada para la recta: Ecuación paramétrica: Algoritmo:
5 Transformada de Hough

6 Transformada de Hough Transformada del círculo: Ecuación paramétrica: Algoritmo:
7 Transformada de Hough Análisis: Puntos críticos: Ineficiencia: la complejidad espacial de la construcción del espacio de parámetros aumenta de forma factorial con el número de los mismos: O(N!) Lo mismo sucede con la complejidad temporal del proceso de votación: O(N-1)! En consecuencia, el método exhaustivo solamente es aplicable a primitivas sencillas (caracterizadas por pocos parámetros) e incluso en estos casos se hace necesaria una discretización muy somera para satisfacer los requerimientos de memoria. Ajuste de sensibilidad: aunque es un factor de menor importancia, el ajuste del tamaño de celda y del número mínimo de votos (a menudo seguido de una supresión de no-máximos) es clave para evitar un elevado número de falsos positivos.
8 Características extendidas Las características de una imagen se puede entender como una representación comprensiva de la imagen, pero reducida Existen una serie de tareas en visión que necesitan extraer estas características Reconocimiento de objetos Reconstrucción 3D Seguimiento de movimiento Búsqueda en base de datos de imágenes Etc. Estas características necesitarían ser identificadas de manera única

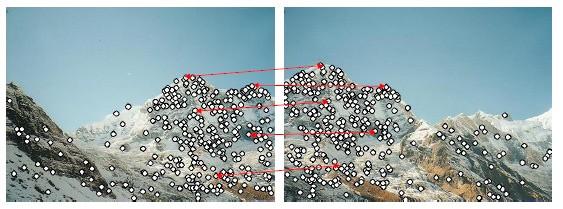




9 Ejemplos Problemas: cambios de iluminación, tamaño, punto de vista, oclusiones, etc.
10 Solución Usar, además de la posición en la imagen, algún descriptor que identifique el punto de manera única (o casi única) El descriptor contendrá algún tipo de información de la imagen alrededor del punto La misma característica, vista desde distintos puntos de vista, con distinta iluminación, con giros, etc. tendrá el mismo descriptor. Su cálculo debe ser eficiente. Existen varias alternativas: SIFT, SURF, MSER, etc.
11 SIFT David G. Lowe, "Distinctive image features from scale-invariant keypoints," International Journal of Computer Vision, 60, 2 (2004) SIFT: Scale Invariant Feature Transform Uno de los primeros en ser usados: el autor deja un ejecutable que puede ser usado El algoritmo devuelve las características encontradas en la imagen Tiene dos pasos: Encontrar la posición de los puntos (se podría usar Harris o cualquier otro) Calcular el descriptor
12 Localización de las características Harris podría ser un buen candidato Por qué? Y en cuanto a la escala? La idea es intentar que el detector sea invariante a escala. Sift propone una detección multiescala


13 Localización multiescala Cómo se puede elegir la escala?



14 Localización multiescala La localización en la multiescala se consigue con una diferencia de gaussianas (DoG)

15 Localización Hay que encontrar un mínimo o máximo entre escalas


16 Eliminación de puntos inestables Se encuentran muchos puntos, pero muchos de ellos son inestables Se eliminan aquellos: Con un contraste bajo Que se encuentran sobre una arista Iniciales: 832. Finales: 536



17 Orientación de la característica Es necesario encontrar cómo está orientada la característica Se encuentra el histograma de orientaciones ponderado en la escala calculada y se calcula la orientación dominante 0 2
18 Descriptor Hasta el momento hemos calculado: Localización del punto. Escala. Orientación. Debemos encontrar el descriptor que nos permita comparar entre las características Se escoge una cierta vecindad del punto a la escala determinada Debemos hacer una rectificación de la vecindad para luego calcular descriptor


19 Descriptor Se realiza un histograma de orientaciones alrededor del punto. Ventana 16x16 particionada en 4x4 Se calcula un histograma de 8 posibles orientaciones Descriptor: 4x4x8=128


20 Ejemplos



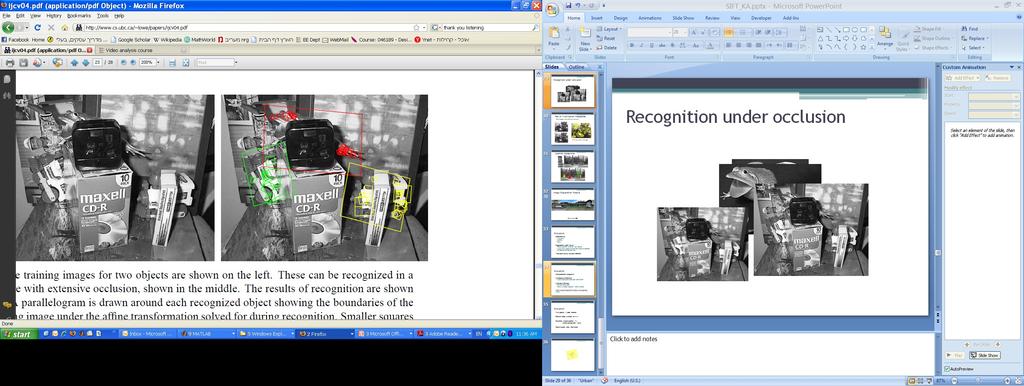
21 Reconocimiento en oclusión

22 Otro ejemplo
Visión por computadora Computer vision
 Visión por computadora Computer vision Conjunto de algoritmos que permiten obtener una representación visual del mundo, suficiente para la realización de una tarea dada. Representación visual El mundo:
Visión por computadora Computer vision Conjunto de algoritmos que permiten obtener una representación visual del mundo, suficiente para la realización de una tarea dada. Representación visual El mundo:
Visión. Sesión 3: Clasificación de imágenes mediante histogramas y características. Departamento CCIA
 Visión Sesión 3: Clasificación de imágenes mediante histogramas y características Departamento CCIA http://www.jtech.ua.es/vision/2011/ Hoy Aplicaciones: emparejamiento de imágenes, búsqueda de patrones
Visión Sesión 3: Clasificación de imágenes mediante histogramas y características Departamento CCIA http://www.jtech.ua.es/vision/2011/ Hoy Aplicaciones: emparejamiento de imágenes, búsqueda de patrones
Visión artificial y Robótica Modelos de movimiento y mapas. Depto. de Ciencia de la Computación e Inteligencia Artificial
 Visión artificial y Robótica Modelos de movimiento y mapas Depto. de Ciencia de la Computación e Inteligencia Artificial Contenidos Sistemas de coordenadas Localización de objetos en el espacio Modelos
Visión artificial y Robótica Modelos de movimiento y mapas Depto. de Ciencia de la Computación e Inteligencia Artificial Contenidos Sistemas de coordenadas Localización de objetos en el espacio Modelos
Visión. Sesión 4: Búsqueda y tracking de modelos 2D en imágenes. Departamento CCIA http://www.jtech.ua.es/vision/2011/
 Visión Sesión 4: Búsqueda y tracking de modelos 2D en imágenes Departamento CCIA http://www.jtech.ua.es/vision/2011/ Hoy Detección de aristas Transformada de Hough Componentes conectadas Alineación de
Visión Sesión 4: Búsqueda y tracking de modelos 2D en imágenes Departamento CCIA http://www.jtech.ua.es/vision/2011/ Hoy Detección de aristas Transformada de Hough Componentes conectadas Alineación de
RECONOCIMIENTO E IDENTIFICACIÓN DE LOGOTIPOS EN IMÁGENES CON TRANSFORMADA SIFT
 UNIVERSIDAD CARLOS III DE MADRID ESCUELA POLITÉCNICA SUPERIOR INGENIERÍA TÉCNICA DE TELECOMUNICACIÓN (ESPECIALIDAD EN SONIDO E IMAGEN) PROYECTO FIN DE CARRERA RECONOCIMIENTO E IDENTIFICACIÓN DE LOGOTIPOS
UNIVERSIDAD CARLOS III DE MADRID ESCUELA POLITÉCNICA SUPERIOR INGENIERÍA TÉCNICA DE TELECOMUNICACIÓN (ESPECIALIDAD EN SONIDO E IMAGEN) PROYECTO FIN DE CARRERA RECONOCIMIENTO E IDENTIFICACIÓN DE LOGOTIPOS
Visión artificial y Robótica Geometría. Depto. de Ciencia de la Computación e Inteligencia Artificial
 Visión artificial y Robótica Geometría Depto. de Ciencia de la Computación e Inteligencia Artificial Contenidos Geometría 2D y 3D Transformación de coordenadas Calibración de la cámara Álgebra necesaria
Visión artificial y Robótica Geometría Depto. de Ciencia de la Computación e Inteligencia Artificial Contenidos Geometría 2D y 3D Transformación de coordenadas Calibración de la cámara Álgebra necesaria
[20380] Visió per Computador Prueba 2 (2013) Teoria (10p) (una pregunta test fallada descuenta 1/4 de pregunta acertada)
![[20380] Visió per Computador Prueba 2 (2013) Teoria (10p) (una pregunta test fallada descuenta 1/4 de pregunta acertada)](/thumbs/53/32802790.jpg "[20380] Visió per Computador Prueba 2 (2013) Teoria (10p) (una pregunta test fallada descuenta 1/4 de pregunta acertada)") 102784 [20380] Visió per Computador Prueba 2 (2013) Teoria (10p) (una pregunta test fallada descuenta 1/4 de pregunta acertada) 1. En cuál de estas posibles aplicaciones podríamos utilizar una característica
102784 [20380] Visió per Computador Prueba 2 (2013) Teoria (10p) (una pregunta test fallada descuenta 1/4 de pregunta acertada) 1. En cuál de estas posibles aplicaciones podríamos utilizar una característica
BÚSQUEDA INTELIGENTE BASADA EN METAHEURÍSTICAS
 Departamento de Inteligencia Artificial Grupo de Análisis de Decisiones y Estadística BÚSQUEDA INTELIGENTE BASADA EN METAHEURÍSTICAS PRÁCTICAS 1 Existen varias características que pueden causar dificultades
Departamento de Inteligencia Artificial Grupo de Análisis de Decisiones y Estadística BÚSQUEDA INTELIGENTE BASADA EN METAHEURÍSTICAS PRÁCTICAS 1 Existen varias características que pueden causar dificultades
Introducción a las RdP. Optimización basada en redes de Petri. Redes de Petri. Son objeto de estudio: RdP. Ejemplos:
 Seminario sobre toma de decisiones en logística y cadenas de suministro Introducción a las RdP Optimización basada en redes de Petri https://belenus.unirioja.es/~emjimene/optimizacion/transparencias.pdf
Seminario sobre toma de decisiones en logística y cadenas de suministro Introducción a las RdP Optimización basada en redes de Petri https://belenus.unirioja.es/~emjimene/optimizacion/transparencias.pdf
Técnicas de inteligencia artificial. Visión Artificial Visión 3D
 Técnicas de inteligencia artificial Visión Artificial Visión 3D Indice Introducción Visión estéreo Introducción Cuando usamos una cámara, perdemos la información 3D x y z y x z y x Sin embargo, la información
Técnicas de inteligencia artificial Visión Artificial Visión 3D Indice Introducción Visión estéreo Introducción Cuando usamos una cámara, perdemos la información 3D x y z y x z y x Sin embargo, la información
Estudio y Selección de las Técnicas SIFT, SURF y ASIFT de Reconocimiento de Imágenes para el Diseño de un Prototipo en Dispositivos Móviles.
 Estudio y Selección de las Técnicas SIFT, SURF y ASIFT de Reconocimiento de Imágenes para el Diseño de un Prototipo en Dispositivos Móviles. Andrea Maricela Plaza Cordero Jorge Luis Zambrano Martínez Autores
Estudio y Selección de las Técnicas SIFT, SURF y ASIFT de Reconocimiento de Imágenes para el Diseño de un Prototipo en Dispositivos Móviles. Andrea Maricela Plaza Cordero Jorge Luis Zambrano Martínez Autores
Detección de bordes: metodos lineales de cálculo de gradientesk, etc. Detección de bordes. Métodos basados en operadores lineales de gradiente
 Detección de bordes Métodos basados en operadores lineales de gradiente 1 Bordes Variaciones fuertes de la intensidad que corresponden a las fronteras de los objetos visualizados Métodos basados en el
Detección de bordes Métodos basados en operadores lineales de gradiente 1 Bordes Variaciones fuertes de la intensidad que corresponden a las fronteras de los objetos visualizados Métodos basados en el
El pipeline de visualización es el conjunto de
 Sistemas de Visualización Pipeline de visualización 3D Definición del modelo geométrico Transformaciones geométricas Transformaciones de visualización Volumen de visualización Proyecciones Pipeline de
Sistemas de Visualización Pipeline de visualización 3D Definición del modelo geométrico Transformaciones geométricas Transformaciones de visualización Volumen de visualización Proyecciones Pipeline de
6.4 TECNICAS DE SEGMENTACION
 6.4 TECNICAS DE SEGMENTACION Procedimientos estadísticos que, tomando como input la información recopilada sobre las bases de segmentación (criterios de segmentación) consideradas pertinentes, permitan
6.4 TECNICAS DE SEGMENTACION Procedimientos estadísticos que, tomando como input la información recopilada sobre las bases de segmentación (criterios de segmentación) consideradas pertinentes, permitan
CRITERIOS DE SELECCIÓN DE MODELOS
 Inteligencia artificial y reconocimiento de patrones CRITERIOS DE SELECCIÓN DE MODELOS 1 Criterios para elegir un modelo Dos decisiones fundamentales: El tipo de modelo (árboles de decisión, redes neuronales,
Inteligencia artificial y reconocimiento de patrones CRITERIOS DE SELECCIÓN DE MODELOS 1 Criterios para elegir un modelo Dos decisiones fundamentales: El tipo de modelo (árboles de decisión, redes neuronales,
Ecuaciones del plano. Cajón de Ciencias
 Ecuaciones del plano Cajón de Ciencias Un plano tiene sus propias ecuaciones que lo definen, al igual que ocurría con la recta. Algunas de ellas son bastante parecidas, y de hecho verás que el plano tiene
Ecuaciones del plano Cajón de Ciencias Un plano tiene sus propias ecuaciones que lo definen, al igual que ocurría con la recta. Algunas de ellas son bastante parecidas, y de hecho verás que el plano tiene
Curso de Procesamiento Digital de Imágenes
 Curso de Procesamiento Digital de Imágenes Impartido por: Elena Martínez Departamento de Ciencias de la Computación IIMAS, UNAM, cubículo 408 http://turing.iimas.unam.mx/~elena/teaching/pdi-mast.html elena.martinez@iimas.unam.mx
Curso de Procesamiento Digital de Imágenes Impartido por: Elena Martínez Departamento de Ciencias de la Computación IIMAS, UNAM, cubículo 408 http://turing.iimas.unam.mx/~elena/teaching/pdi-mast.html elena.martinez@iimas.unam.mx
PROGRAMACIÓN DIDÁCTICA
 PROGRAMACIÓN DIDÁCTICA Materia Período FBPI Tramo I Ámbito Científico-Tecnológico Bloque I Los números. Créditos 3 (30 horas) Bloque II Sistema Métrico Decimal y elementos de Créditos 4 (40 horas) geometría
PROGRAMACIÓN DIDÁCTICA Materia Período FBPI Tramo I Ámbito Científico-Tecnológico Bloque I Los números. Créditos 3 (30 horas) Bloque II Sistema Métrico Decimal y elementos de Créditos 4 (40 horas) geometría
Bloque 1. Contenidos comunes. (Total: 3 sesiones)
") 4º E.S.O. OPCIÓN A 1.1.1 Contenidos 1.1.1.1 Bloque 1. Contenidos comunes. (Total: 3 sesiones) Planificación y utilización de procesos de razonamiento y estrategias de resolución de problemas, tales como
4º E.S.O. OPCIÓN A 1.1.1 Contenidos 1.1.1.1 Bloque 1. Contenidos comunes. (Total: 3 sesiones) Planificación y utilización de procesos de razonamiento y estrategias de resolución de problemas, tales como
INSTITUTO CHAPULTEPEC MIDDLE SCHOOL
 MATEMÁTICAS VII. (1er BIMESTRE) INSTITUTO CHAPULTEPEC MIDDLE SCHOOL. 2009-2010 1) SIGNIFICADO Y USO DE LOS NÚMEROS a) Lectura y escritura de números naturales. - Operaciones con números naturales. - Problemas
MATEMÁTICAS VII. (1er BIMESTRE) INSTITUTO CHAPULTEPEC MIDDLE SCHOOL. 2009-2010 1) SIGNIFICADO Y USO DE LOS NÚMEROS a) Lectura y escritura de números naturales. - Operaciones con números naturales. - Problemas
PATRONES DE DISTRIBUCIÓN ESPACIAL
 PATRONES DE DISTRIBUCIÓN ESPACIAL Tipos de arreglos espaciales Al azar Regular o Uniforme Agrupada Hipótesis Ecológicas Disposición al Azar Todos los puntos en el espacio tienen la misma posibilidad de
PATRONES DE DISTRIBUCIÓN ESPACIAL Tipos de arreglos espaciales Al azar Regular o Uniforme Agrupada Hipótesis Ecológicas Disposición al Azar Todos los puntos en el espacio tienen la misma posibilidad de
VISIÓN POR COMPUTADOR
 VISIÓN POR COMPUTADOR Introducción Ingeniería de Sistemas y Automática Universidad Miguel Hernández Tabla de Contenidos 2 Definición de Visión por Computador Captación Información Luminosa Imagen Digital
VISIÓN POR COMPUTADOR Introducción Ingeniería de Sistemas y Automática Universidad Miguel Hernández Tabla de Contenidos 2 Definición de Visión por Computador Captación Información Luminosa Imagen Digital
Acuerdo 286 Matemáticas
 Acuerdo 286 Matemáticas Habilidad Matemática Fausto Zarate Melchor Habilidad Matemática. La habilidad matemática se compone de dos tipos de habilidad: la espacial y la numérica. a) Representación del espacio.
Acuerdo 286 Matemáticas Habilidad Matemática Fausto Zarate Melchor Habilidad Matemática. La habilidad matemática se compone de dos tipos de habilidad: la espacial y la numérica. a) Representación del espacio.
UNIDAD 8: SUCESIONES Y SERIES
 UNIDAD 8: SUCESIONES Y SERIES Llegamos a la última unidad de la asignatura correspondiente a Sucesiones y Series, recuerde mantener la motivación hasta el final, el tema que vamos a tratar aquí es de especial
UNIDAD 8: SUCESIONES Y SERIES Llegamos a la última unidad de la asignatura correspondiente a Sucesiones y Series, recuerde mantener la motivación hasta el final, el tema que vamos a tratar aquí es de especial
Departamento de Matemáticas, CCIR/ITESM. 9 de febrero de 2011
 Factorización LU Departamento de Matemáticas, CCIR/ITESM 9 de febrero de 2011 Índice 26.1. Introducción............................................... 1 26.2. Factorización LU............................................
Factorización LU Departamento de Matemáticas, CCIR/ITESM 9 de febrero de 2011 Índice 26.1. Introducción............................................... 1 26.2. Factorización LU............................................
Tipos algebraicos y abstractos. Algoritmos y Estructuras de Datos I. Tipos algebraicos
 Algoritmos y Estructuras de Datos I 1 cuatrimestre de 009 Departamento de Computación - FCEyN - UBA Programación funcional - clase Tipos algebraicos Tipos algebraicos y abstractos ya vimos los tipos básicos
Algoritmos y Estructuras de Datos I 1 cuatrimestre de 009 Departamento de Computación - FCEyN - UBA Programación funcional - clase Tipos algebraicos Tipos algebraicos y abstractos ya vimos los tipos básicos
Facultad de Ciencias Económicas, Jurídicas y Sociales - Métodos Cuantitativos para los Negocios
 Ubicación dentro del Programa Unidad II Herramientas Basicas UNIDAD II: HERRAMIENTAS BÁSICAS 1. Representación de la Causa-Efecto: Diagrama de Ishikawa. 2. Elaboración de pronósticos. Componentes de una
Ubicación dentro del Programa Unidad II Herramientas Basicas UNIDAD II: HERRAMIENTAS BÁSICAS 1. Representación de la Causa-Efecto: Diagrama de Ishikawa. 2. Elaboración de pronósticos. Componentes de una
Porqué analizar imágenes?
 Porqué analizar imágenes? Medidas que requieren estudiar un número demasiado elevado de imágenes. Análisis cuantitativo: La visión humana no cuantifica por si sola. El análisis automático es más repetitivo
Porqué analizar imágenes? Medidas que requieren estudiar un número demasiado elevado de imágenes. Análisis cuantitativo: La visión humana no cuantifica por si sola. El análisis automático es más repetitivo
UNIDAD 8 INECUACIONES. Objetivo general.
 8. 1 UNIDAD 8 INECUACIONES Objetivo general. Al terminar esta Unidad resolverás inecuaciones lineales y cuadráticas e inecuaciones que incluyan valores absolutos, identificarás sus conjuntos solución en
8. 1 UNIDAD 8 INECUACIONES Objetivo general. Al terminar esta Unidad resolverás inecuaciones lineales y cuadráticas e inecuaciones que incluyan valores absolutos, identificarás sus conjuntos solución en
OPTIMIZACIÓN Y SIMULACIÓN PARA LA EMPRESA. Tema 4 Optimización no Lineal
 OPTIMIZACIÓN Y SIMULACIÓN PARA LA EMPRESA Tema 4 Optimización no Lineal ORGANIZACIÓN DEL TEMA Sesiones: El caso sin restricciones: formulación, ejemplos Condiciones de optimalidad, métodos Caso con restricciones:
OPTIMIZACIÓN Y SIMULACIÓN PARA LA EMPRESA Tema 4 Optimización no Lineal ORGANIZACIÓN DEL TEMA Sesiones: El caso sin restricciones: formulación, ejemplos Condiciones de optimalidad, métodos Caso con restricciones:
Capitulo 4. DECISIONES BAJO RIESGO TEORIA DE JUEGOS
 Capitulo 4. DECISIONES BAJO RIESGO TEORIA DE JUEGOS INTRODUCCIÓN En el mundo real, tanto en las relaciones económicas como en las políticas o sociales, son muy frecuentes las situaciones en las que, al
Capitulo 4. DECISIONES BAJO RIESGO TEORIA DE JUEGOS INTRODUCCIÓN En el mundo real, tanto en las relaciones económicas como en las políticas o sociales, son muy frecuentes las situaciones en las que, al
Geometría de las superficies
 Geometría de las superficies Klette, schluns, koschan Computer vision: three dimensional data from images Cap 3 1 Representaciones funcionales Representación mediante una ecuación condicional para X e
Geometría de las superficies Klette, schluns, koschan Computer vision: three dimensional data from images Cap 3 1 Representaciones funcionales Representación mediante una ecuación condicional para X e
Introducción a la Geometría Computacional. Análisis de Algoritmos
 Introducción a la Geometría Computacional Análisis de Algoritmos Geometría Computacional La Geometría Computacional surgió a finales de los 70s del área de diseño y análisis de algoritmos. Estudio sistemático
Introducción a la Geometría Computacional Análisis de Algoritmos Geometría Computacional La Geometría Computacional surgió a finales de los 70s del área de diseño y análisis de algoritmos. Estudio sistemático
Reconocimiento automático a través de visión artificial, correlación estadística y Matlab aplicado a las matrículas de vehículos
 Reconocimiento automático a través de visión artificial, correlación estadística y Matlab aplicado a las matrículas de vehículos Orlando Barcia * obarcia@ups.edu.ec Introducción Existen muchas investigaciones
Reconocimiento automático a través de visión artificial, correlación estadística y Matlab aplicado a las matrículas de vehículos Orlando Barcia * obarcia@ups.edu.ec Introducción Existen muchas investigaciones
Tema 6. Diseño de controladores discretos
 Ingeniería de Control Tema 6. Diseño de controladores discretos Daniel Rodríguez Ramírez Teodoro Alamo Cantarero Contextualización del tema Conocimientos que se adquieren en este tema: Como obtener el
Ingeniería de Control Tema 6. Diseño de controladores discretos Daniel Rodríguez Ramírez Teodoro Alamo Cantarero Contextualización del tema Conocimientos que se adquieren en este tema: Como obtener el
Diseño Gráficos de Control
 Diseño Gráficos de Control Resumen Este procedimiento esta diseñado para ayudar a determinar el tamaño de muestra apropiado y los parámetros comunes para los gráficos de control. El diseño esta basado
Diseño Gráficos de Control Resumen Este procedimiento esta diseñado para ayudar a determinar el tamaño de muestra apropiado y los parámetros comunes para los gráficos de control. El diseño esta basado
I. TÍTULO DE LA SESIÓN Usando material reciclado aprendo el desarrollo de los primas y el cilindro
 PLANIFICACIÓN DE LA SESIÓN DE APRENDIZAJE Grado: Primero Duración: 2 horas pedagógicas I. TÍTULO DE LA SESIÓN Usando material reciclado aprendo el desarrollo de los primas y el cilindro II. APRENDIZAJES
PLANIFICACIÓN DE LA SESIÓN DE APRENDIZAJE Grado: Primero Duración: 2 horas pedagógicas I. TÍTULO DE LA SESIÓN Usando material reciclado aprendo el desarrollo de los primas y el cilindro II. APRENDIZAJES
Tema 9: Contraste de hipótesis.
 Estadística 84 Tema 9: Contraste de hipótesis. 9.1 Introducción. El objetivo de este tema es proporcionar métodos que permiten decidir si una hipótesis estadística debe o no ser rechazada, en base a los
Estadística 84 Tema 9: Contraste de hipótesis. 9.1 Introducción. El objetivo de este tema es proporcionar métodos que permiten decidir si una hipótesis estadística debe o no ser rechazada, en base a los
PROCESAMIENTO DE IMÁGENES APLICADOS A LA EDUCACIÓN
 PROCESAMIENTO DE IMÁGENES APLICADOS A LA EDUCACIÓN Resumen En el procesamiento de Imágenes es necesario implementar algoritmos de bajo costo para identificar objetos básicos, como son figuras geométricas,
PROCESAMIENTO DE IMÁGENES APLICADOS A LA EDUCACIÓN Resumen En el procesamiento de Imágenes es necesario implementar algoritmos de bajo costo para identificar objetos básicos, como son figuras geométricas,
Materia: Matemática de Séptimo Tema: Circunferencia. Marco teórico
 Materia: Matemática de Séptimo Tema: Circunferencia Cómo harías para saber la longitud de la concha de la pizza? Una pizza grande tiene 14 pulgadas de diámetro y se puede cortar en 8 o 10 pedazos, la concha
Materia: Matemática de Séptimo Tema: Circunferencia Cómo harías para saber la longitud de la concha de la pizza? Una pizza grande tiene 14 pulgadas de diámetro y se puede cortar en 8 o 10 pedazos, la concha
Tema: Detección de billetes con OpenCV en Android.
 TRABAJO FINAL PARA APROBACION DEL CURSO DE POSTGRADO: INTRODUCCION AL PROCESAMIENTO DIGITAL DE IMAGENES. UN ENFOQUE TEORICO - PRACTICO UTILIZANDO OPEN CV. FACULTAD DE INGENIERÍA. 2013. Autor: Vera, José
TRABAJO FINAL PARA APROBACION DEL CURSO DE POSTGRADO: INTRODUCCION AL PROCESAMIENTO DIGITAL DE IMAGENES. UN ENFOQUE TEORICO - PRACTICO UTILIZANDO OPEN CV. FACULTAD DE INGENIERÍA. 2013. Autor: Vera, José
RECONOCIMIENTO E IDENTIFICACIÓN DE LOGOTIPOS EN IMÁGENES CON TRANSFORMADA SIFT
 UNIVERSIDAD CARLOS III DE MADRID ESCUELA POLITÉCNICA SUPERIOR INGENIERÍA TÉCNICA DE TELECOMUNICACIÓN ESPECIALIDAD EN SONIDO E IMAGEN PROYECTO FIN DE CARRERA RECONOCIMIENTO E IDENTIFICACIÓN DE LOGOTIPOS
UNIVERSIDAD CARLOS III DE MADRID ESCUELA POLITÉCNICA SUPERIOR INGENIERÍA TÉCNICA DE TELECOMUNICACIÓN ESPECIALIDAD EN SONIDO E IMAGEN PROYECTO FIN DE CARRERA RECONOCIMIENTO E IDENTIFICACIÓN DE LOGOTIPOS
Complejidad de los Algoritmos
 Que es un Algoritmo? Complejidad de los Algoritmos Webster: cualquier método especial para resolver cierta clase de problemas. Horowitz: método preciso utilizable en una computadora para la solución de
Que es un Algoritmo? Complejidad de los Algoritmos Webster: cualquier método especial para resolver cierta clase de problemas. Horowitz: método preciso utilizable en una computadora para la solución de
 GRADIENTE La laplaciana es un buen filtro paso alto, pero no es una buena herramienta para resaltar o detectar los bordes. En muchos casos, los bordes o límites de las figuras o de las regiones aparecen
GRADIENTE La laplaciana es un buen filtro paso alto, pero no es una buena herramienta para resaltar o detectar los bordes. En muchos casos, los bordes o límites de las figuras o de las regiones aparecen
Formulación del problema de la ruta más corta en programación lineal
 Formulación del problema de la ruta más corta en programación lineal En esta sección se describen dos formulaciones de programación lineal para el problema de la ruta más corta. Las formulaciones son generales,
Formulación del problema de la ruta más corta en programación lineal En esta sección se describen dos formulaciones de programación lineal para el problema de la ruta más corta. Las formulaciones son generales,
a la definición de un método aplicable a problemas de visualización de archivos incompletos o de formato desconocido.
 1. INTRODUCCIÓN En el presente documento se expone un método que facilita la visualización de todo tipo de archivos, completos o incompletos, partiendo de la identificación del formato de los mismos. Los
1. INTRODUCCIÓN En el presente documento se expone un método que facilita la visualización de todo tipo de archivos, completos o incompletos, partiendo de la identificación del formato de los mismos. Los
PENDIENTES DE MATEMÁTICAS DE 3º ESO (CURSO )
") PENDIENTES DE MATEMÁTICAS DE 3º ESO (CURSO 2015-2016) CRITERIOS E INDICADORES Se detallan a continuación los criterios de evaluación junto con sus indicadores de contenidos asociados. Criterio 1: Identificar
PENDIENTES DE MATEMÁTICAS DE 3º ESO (CURSO 2015-2016) CRITERIOS E INDICADORES Se detallan a continuación los criterios de evaluación junto con sus indicadores de contenidos asociados. Criterio 1: Identificar
UNIDAD 12: ESTADISTICA. OBJETIVOS
 UNIDAD 12: ESTADISTICA. OBJETIVOS Conocer y manejar los términos básicos del lenguaje de la estadística descriptiva elemental. Conocer y manejar distintas técnicas de organización de datos estadísticos
UNIDAD 12: ESTADISTICA. OBJETIVOS Conocer y manejar los términos básicos del lenguaje de la estadística descriptiva elemental. Conocer y manejar distintas técnicas de organización de datos estadísticos
CAPÍTULO I. INTRODUCCIÓN. Cuando se requiere obtener información de una población, y se desean obtener los mejores
 CAPÍTULO I. INTRODUCCIÓN I.1 Breve Descripción Cuando se requiere obtener información de una población, y se desean obtener los mejores y más completos resultados, el censo es una opción para dar una respuesta
CAPÍTULO I. INTRODUCCIÓN I.1 Breve Descripción Cuando se requiere obtener información de una población, y se desean obtener los mejores y más completos resultados, el censo es una opción para dar una respuesta
License Plate Detection using Neural Networks
 License Plate Detection using Neural Networks Luis Carrera, Marco Mora Les Fous du Pixel Image Processing Research Group Department of Computer Science Catholic University of Maule http://www.lfdp-iprg.net
License Plate Detection using Neural Networks Luis Carrera, Marco Mora Les Fous du Pixel Image Processing Research Group Department of Computer Science Catholic University of Maule http://www.lfdp-iprg.net
Robots Autónomos. Depto. de Ciencia de la Computación e Inteligencia Artificial
 Robots Autónomos Depto. de Ciencia de la Computación e Inteligencia Artificial Contenido Problema del mapeado Mapeado 2D Mapeado 3D Introducción al SLAM Mapeado topológico Construcción de mapas: Descripción
Robots Autónomos Depto. de Ciencia de la Computación e Inteligencia Artificial Contenido Problema del mapeado Mapeado 2D Mapeado 3D Introducción al SLAM Mapeado topológico Construcción de mapas: Descripción
Tema 4. Reducción del ruido
 Div. Ingeniería de Sistemas y Automática Universidad Miguel Hernández GRUPO DE TECNOLOGÍA INDUSTRIAL Tabla de Contenidos Definición Filtros Lineales Filtros Temporales Realce Espacial Definición Ruido:
Div. Ingeniería de Sistemas y Automática Universidad Miguel Hernández GRUPO DE TECNOLOGÍA INDUSTRIAL Tabla de Contenidos Definición Filtros Lineales Filtros Temporales Realce Espacial Definición Ruido:
SERVICIO NACIONAL DE APRENDIZAJE SENA
 SERVICIO NACIONAL DE APRENDIZAJE SENA GUÍA DE APRENDIZAJE SISTEMA INTEGRADO DE GESTIÓN Proceso Gestión de la Formación Profesional Integral Procedimiento Ejecución de la Formación Profesional Integral
SERVICIO NACIONAL DE APRENDIZAJE SENA GUÍA DE APRENDIZAJE SISTEMA INTEGRADO DE GESTIÓN Proceso Gestión de la Formación Profesional Integral Procedimiento Ejecución de la Formación Profesional Integral
5. Cuáles son las actividades primarias de la producción de software
 1. La clasificación de los recursos humanos son dos: - Personal con experiencia - Personal nuevo sin experiencia (novatos) 2. Cual son las ventajas y desventajas sobre esta clasificación Las ventajas es
1. La clasificación de los recursos humanos son dos: - Personal con experiencia - Personal nuevo sin experiencia (novatos) 2. Cual son las ventajas y desventajas sobre esta clasificación Las ventajas es
Ampliamos y reducimos figuras en el plano cartesiano
 SEXTO GRADO - UNIDAD 5 - SESIÓN 0 Ampliamos y reducimos figuras en el plano cartesiano Al final de la sesión, los niños y niñas realizarán representaciones gráficas de forma bidimensional en el portafolio
SEXTO GRADO - UNIDAD 5 - SESIÓN 0 Ampliamos y reducimos figuras en el plano cartesiano Al final de la sesión, los niños y niñas realizarán representaciones gráficas de forma bidimensional en el portafolio
Aprendizaje: Boosting y Adaboost
 Técnicas de Inteligencia Artificial Aprendizaje: Boosting y Adaboost Boosting 1 Indice Combinando clasificadores débiles Clasificadores débiles La necesidad de combinar clasificadores Bagging El algoritmo
Técnicas de Inteligencia Artificial Aprendizaje: Boosting y Adaboost Boosting 1 Indice Combinando clasificadores débiles Clasificadores débiles La necesidad de combinar clasificadores Bagging El algoritmo
TABLA DE CONTENIDOS MATEMÁTICAS QUINTO GRADO EDUCACIÓN PRIMARIA
 TABLA DE ESPECIFICACIONES PARA CONSTRUIR REACTIOS I aditivos Resolución de problemas que impliquen sumar o restar fracciones cuyos denomina dores son múltiplos uno de otro. A partir de un planteamiento
TABLA DE ESPECIFICACIONES PARA CONSTRUIR REACTIOS I aditivos Resolución de problemas que impliquen sumar o restar fracciones cuyos denomina dores son múltiplos uno de otro. A partir de un planteamiento
Conceptos básicos de Geometría
 Dr. Eduardo A. RODRÍGUEZ TELLO CINVESTAV-Tamaulipas 15 de enero del 2013 Dr. Eduardo RODRÍGUEZ T. (CINVESTAV) 15 de enero del 2013 1 / 25 1 Geometría Afín Geometría Euclidiana Áreas y ángulos Dr. Eduardo
Dr. Eduardo A. RODRÍGUEZ TELLO CINVESTAV-Tamaulipas 15 de enero del 2013 Dr. Eduardo RODRÍGUEZ T. (CINVESTAV) 15 de enero del 2013 1 / 25 1 Geometría Afín Geometría Euclidiana Áreas y ángulos Dr. Eduardo
TOMA DE DECISIONES. Unidad 8: El análisis estratégico en la solución de problemas ( II )
") TOMA DE DECISIONES Unidad 8: El análisis estratégico en la solución de problemas ( II ) Objetivo específico 8: Establecer las claves para generar alternativas eficaces y adaptadas al problema, encontrar
TOMA DE DECISIONES Unidad 8: El análisis estratégico en la solución de problemas ( II ) Objetivo específico 8: Establecer las claves para generar alternativas eficaces y adaptadas al problema, encontrar
Técnicas de Clasificación Supervisada DRA. LETICIA FLORES PULIDO
 Técnicas de Clasificación Supervisada DRA. LETICIA FLORES PULIDO 2 Objetivo El objetivo principal de las técnicas de clasificación supervisada es obtener un modelo clasificatorio válido para permitir tratar
Técnicas de Clasificación Supervisada DRA. LETICIA FLORES PULIDO 2 Objetivo El objetivo principal de las técnicas de clasificación supervisada es obtener un modelo clasificatorio válido para permitir tratar
COLEGIO ALEXANDER DUL
 PRIMER BIMESTRE CICLO ESCOLAR 2016 2017 MATEMÁTICAS ESTRUCTURA DEL APRENDIZAJES ESPERADOS PROGRAMA REALIZACIÓN 1-8 TEMA 1 2. Tema: Problemas aditivos. Tema: Problemas multiplicativos. impliquen sumar o
PRIMER BIMESTRE CICLO ESCOLAR 2016 2017 MATEMÁTICAS ESTRUCTURA DEL APRENDIZAJES ESPERADOS PROGRAMA REALIZACIÓN 1-8 TEMA 1 2. Tema: Problemas aditivos. Tema: Problemas multiplicativos. impliquen sumar o
Teorema Central del Límite (1)
") Teorema Central del Límite (1) Definición. Cualquier cantidad calculada a partir de las observaciones de una muestra se llama estadístico. La distribución de los valores que puede tomar un estadístico
Teorema Central del Límite (1) Definición. Cualquier cantidad calculada a partir de las observaciones de una muestra se llama estadístico. La distribución de los valores que puede tomar un estadístico
MATRICES DE RAVEN SET AVANZADO II CRITERIOS UTIIZADOS PARA RESOLVER LAS MATRICES DIDÁCTICA DE LA FÍSICA PÁGINA 20
 MATRICES DE RAVEN SET AVANZADO II CRITERIOS UTIIZADOS PARA RESOLVER LAS MATRICES NOMBRE: William H. Angulo M. DIDÁCTICA DE LA FÍSICA RESPUESTA: 8 PÁGINA 20 1. Se identificaron los elementos que forman
MATRICES DE RAVEN SET AVANZADO II CRITERIOS UTIIZADOS PARA RESOLVER LAS MATRICES NOMBRE: William H. Angulo M. DIDÁCTICA DE LA FÍSICA RESPUESTA: 8 PÁGINA 20 1. Se identificaron los elementos que forman
M É T O D O S A L T E R N A T I V O S P A R A E X T R A C C I O N D E V E C T O R C A R A C T E R I S T I C AS.
 A P É N D I C E D M É T O D O S A L T E R N A T I V O S P A R A E X T R A C C I O N D E V E C T O R C A R A C T E R I S T I C AS. Código extendido de Sombras. Burr ha propuesto el código de sombras como
A P É N D I C E D M É T O D O S A L T E R N A T I V O S P A R A E X T R A C C I O N D E V E C T O R C A R A C T E R I S T I C AS. Código extendido de Sombras. Burr ha propuesto el código de sombras como
VISIÓN 3D. José M. Sebastián - Luis M. Jiménez. Problema Central de la Visión Artificial Tridimensional.
 VISIÓN 3D José M. Sebastián - Luis M. Jiménez Problema Central de la Visión Artificial Tridimensional. A partir de una imagen o de una secuencia de imágenes de un objeto estacionario o en movimiento, tomada
VISIÓN 3D José M. Sebastián - Luis M. Jiménez Problema Central de la Visión Artificial Tridimensional. A partir de una imagen o de una secuencia de imágenes de un objeto estacionario o en movimiento, tomada
PERCEPCIÓN DEL HABLA Reconocimiento de Palabras Habladas
 PERCEPCIÓN DEL HABLA Reconocimiento de Palabras Habladas En el reconocimiento de la palabra se acepta que, comúnmente, ocurren las siguientes fases de habla: Contacto inicial, Selección léxica, Reconocimiento
PERCEPCIÓN DEL HABLA Reconocimiento de Palabras Habladas En el reconocimiento de la palabra se acepta que, comúnmente, ocurren las siguientes fases de habla: Contacto inicial, Selección léxica, Reconocimiento
RecAM. Reconocimiento Automático de Matrículas
 RecAM Reconocimiento Automático de Matrículas Curso de Tratamiento de Imágenes por Computadora Año 2003 Tutor: Ing. Alvaro Pardo Integrantes: Rodrigo Abal Raúl Medeglia Nicolás Pebet De Qué Se Trata? Cada
RecAM Reconocimiento Automático de Matrículas Curso de Tratamiento de Imágenes por Computadora Año 2003 Tutor: Ing. Alvaro Pardo Integrantes: Rodrigo Abal Raúl Medeglia Nicolás Pebet De Qué Se Trata? Cada
Fuentes de Información
 Depto. de Ing. de Sistemas e Industrial Universidad Nacional de Colombia, Bogotá Seminario de Investigación I Contenido Introducción 1 Introducción 2 3 4 5 Preguntas Claves al Comenzar un Proyecto de Investigación
Depto. de Ing. de Sistemas e Industrial Universidad Nacional de Colombia, Bogotá Seminario de Investigación I Contenido Introducción 1 Introducción 2 3 4 5 Preguntas Claves al Comenzar un Proyecto de Investigación
Proyecto Fin de Carrera. Diseño de mapas de navegabilidad para entornos de interior mediante visión omnidireccional
 Proyecto Fin de Carrera Diseño de mapas de navegabilidad para entornos de interior mediante visión omnidireccional Jasón Omedes LLorente Directores: Gonzalo López-Nicolás José Jesús Guerrero Campo Ingeniería
Proyecto Fin de Carrera Diseño de mapas de navegabilidad para entornos de interior mediante visión omnidireccional Jasón Omedes LLorente Directores: Gonzalo López-Nicolás José Jesús Guerrero Campo Ingeniería
TECNICO SUPERIOR EN INFORMÁTICA EMPRESARIAL MÓDULO INTRUCCIONAL
 1 TECNICO SUPERIOR EN INFORMÁTICA EMPRESARIAL MÓDULO INTRUCCIONAL TECNOLOGÍA DE LA COMPUTADORA FACILITADOR: PARTICIPANTE: DAVID, CHIRIQUÍ 2015 2 Qué es un programa? Un programa informático es un conjunto
1 TECNICO SUPERIOR EN INFORMÁTICA EMPRESARIAL MÓDULO INTRUCCIONAL TECNOLOGÍA DE LA COMPUTADORA FACILITADOR: PARTICIPANTE: DAVID, CHIRIQUÍ 2015 2 Qué es un programa? Un programa informático es un conjunto
Laboratorio de Visión para Robots. Práctica 2
 1. Preparación del entorno de trabajo Laboratorio de Visión para Robots Práctica 2 La manera en la que trabajaremos será primero utilizando Eclipse para prototipar nuestro programa. Cuando podamos procesar
1. Preparación del entorno de trabajo Laboratorio de Visión para Robots Práctica 2 La manera en la que trabajaremos será primero utilizando Eclipse para prototipar nuestro programa. Cuando podamos procesar
Selección de fuentes de datos y calidad de datos
 Selección de fuentes de datos y calidad de datos ESCUELA COMPLUTENSE DE VERANO 2014 MINERIA DE DATOS CON SAS E INTELIGENCIA DE NEGOCIO Juan F. Dorado José María Santiago . Valores atípicos. Valores faltantes.
Selección de fuentes de datos y calidad de datos ESCUELA COMPLUTENSE DE VERANO 2014 MINERIA DE DATOS CON SAS E INTELIGENCIA DE NEGOCIO Juan F. Dorado José María Santiago . Valores atípicos. Valores faltantes.
1. Curvas Regulares y Simples
 1. Regulares y Simples en R n. Vamos a estudiar algunas aplicaciones del calculo diferencial e integral a funciones que están definidas sobre los puntos de una curva del plano o del espacio, como por ejemplo
1. Regulares y Simples en R n. Vamos a estudiar algunas aplicaciones del calculo diferencial e integral a funciones que están definidas sobre los puntos de una curva del plano o del espacio, como por ejemplo
PRÁCTICA 4: RESPUESTA EN FRECUENCIA Y COMPENSACION P P T T T. 1.-Objetivos.
 PRÁCTICA 4: RESPUESTA E FRECUECIA Y COMPESACIO 1.-Objetivos. P P P P Medir y conocer la respuesta en frecuencia de los amplificadores. Medir correctamente la ganancia de tensión de un amplificador, en
PRÁCTICA 4: RESPUESTA E FRECUECIA Y COMPESACIO 1.-Objetivos. P P P P Medir y conocer la respuesta en frecuencia de los amplificadores. Medir correctamente la ganancia de tensión de un amplificador, en
Indicadores de calidad
 Indicadores de calidad QUE ES CALIDAD EN SALUD La calidad de la atención en salud ha constituido en forma permanente una de las prioridades y responsabilidades fundamentales del Ministerio de Salud de
Indicadores de calidad QUE ES CALIDAD EN SALUD La calidad de la atención en salud ha constituido en forma permanente una de las prioridades y responsabilidades fundamentales del Ministerio de Salud de
Colegio Decroly Americano Matemática 7th Core, Contenidos I Período
 Matemática 7th Core, 2015-2016 Contenidos I Período 1. Sentido Numérico a. Identificar y escribir patrones. b. Escribir números en forma de exponentes. c. Escribir cantidades en notación científica. d.
Matemática 7th Core, 2015-2016 Contenidos I Período 1. Sentido Numérico a. Identificar y escribir patrones. b. Escribir números en forma de exponentes. c. Escribir cantidades en notación científica. d.
TSTC. Dpt. Teoría de la Señal, Telemática y Comunicaciones Tema 2 CINEMÁTICA DE MANIPULADORES
 Dpt. Teoría de la Señal, Telemática y Comunicaciones Tema 2 CINEMÁTICA DE MANIPULADORES Secciones 1. Introducción. 2. Coordenadas y Transformaciones Homogéneas. 3. Problema Cinemático Directo. Método de
Dpt. Teoría de la Señal, Telemática y Comunicaciones Tema 2 CINEMÁTICA DE MANIPULADORES Secciones 1. Introducción. 2. Coordenadas y Transformaciones Homogéneas. 3. Problema Cinemático Directo. Método de
NIVEL: 6º ÁREA: MATEMÁTICAS 1º TRIMESTRE CONCRECIÓN DE LOS OBJETIVOS AL CURSO
 NIVEL: 6º ÁREA: MATEMÁTICAS 1º TRIMESTRE CONCRECIÓN DE LOS OBJETIVOS AL CURSO Leer, escribir, componer, descomponer y representar números naturales. Sumar, restar, multiplicar y dividir números naturales.
NIVEL: 6º ÁREA: MATEMÁTICAS 1º TRIMESTRE CONCRECIÓN DE LOS OBJETIVOS AL CURSO Leer, escribir, componer, descomponer y representar números naturales. Sumar, restar, multiplicar y dividir números naturales.
Nombre: Carné Ordinal. Parte I preguntas (1 punto c/u) Escriba la respuesta en el espacio indicado o encierre en un círculo la respuesta correcta:
 Escriba la respuesta en el espacio indicado o encierre en un círculo la respuesta correcta:") INSTITUTO TECNOLÓGICO DE COSTA RICA II SEMESTRE 2013 ESCUELA DE INGENIERIA EN ELECTRÓNICA CURSO: EL-5408 CONTROL AUTOMÁTICO MEDIO: Examen 3 PROF: ING. EDUARDO INTERIANO Nombre: Carné Ordinal Parte I preguntas
INSTITUTO TECNOLÓGICO DE COSTA RICA II SEMESTRE 2013 ESCUELA DE INGENIERIA EN ELECTRÓNICA CURSO: EL-5408 CONTROL AUTOMÁTICO MEDIO: Examen 3 PROF: ING. EDUARDO INTERIANO Nombre: Carné Ordinal Parte I preguntas
es el lugar geométrico de los puntos p tales que p 0 p n o p 0 p o. p x ; y ; z perteneciente a y un vector no
 El Plano y la Recta en el Espacio Matemática 4º Año Cód. 145-15 P r o f. M a r í a d e l L u j á n M a r t í n e z P r o f. J u a n C a r l o s B u e P r o f. M i r t a R o s i t o P r o f. V e r ó n i
El Plano y la Recta en el Espacio Matemática 4º Año Cód. 145-15 P r o f. M a r í a d e l L u j á n M a r t í n e z P r o f. J u a n C a r l o s B u e P r o f. M i r t a R o s i t o P r o f. V e r ó n i
CERÁMICA, PIEDRA PIZARRA Y BALDOSAS
 1 nivel dificultad CALCULAR PS-CA02 CÓMO CALCULAR? CERÁMICA, PIEDRA PIZARRA Y BALDOSAS Para revestir los pisos o paredes de la casa, se pueden usar palmetas de diversos materiales y estilos como: cerámica,
1 nivel dificultad CALCULAR PS-CA02 CÓMO CALCULAR? CERÁMICA, PIEDRA PIZARRA Y BALDOSAS Para revestir los pisos o paredes de la casa, se pueden usar palmetas de diversos materiales y estilos como: cerámica,
Se inicia con las especificaciones del módulo fotovoltaico.
 Con base en las especificaciones técnicas del inversor SB 3000U y de un módulo fotovoltaico de 175 watts, indicar los valores los parámetros característicos requeridos para el dimensionamiento del sistema.
Con base en las especificaciones técnicas del inversor SB 3000U y de un módulo fotovoltaico de 175 watts, indicar los valores los parámetros característicos requeridos para el dimensionamiento del sistema.
Reconocimiento de objetos en una plataforma robótica móvil
 Culcyt/ /Reconocimiento de Patrones Reconocimiento de objetos en una plataforma robótica móvil Lorenzo García Tena 1, Humberto Sossa 2, Alejandro Alvarado 1, Osslan Vergara 1, Victor Manuel Hinostroza
Culcyt/ /Reconocimiento de Patrones Reconocimiento de objetos en una plataforma robótica móvil Lorenzo García Tena 1, Humberto Sossa 2, Alejandro Alvarado 1, Osslan Vergara 1, Victor Manuel Hinostroza
Unidad 5: Geometría Analítica
 Unidad 5 Geometría Analítica 5. Ecuaciones de una recta Los planos y las rectas son objetos geométricos que se pueden representar mediante ecuaciones. Encontraremos la ecuación vectorial de una recta r
Unidad 5 Geometría Analítica 5. Ecuaciones de una recta Los planos y las rectas son objetos geométricos que se pueden representar mediante ecuaciones. Encontraremos la ecuación vectorial de una recta r
Tema 2. Descripción Conjunta de Varias Variables
 Tema 2. Descripción Conjunta de Varias Variables Cuestiones de Verdadero/Falso 1. La covarianza mide la relación lineal entre dos variables, pero depende de las unidades de medida utilizadas. 2. El análisis
Tema 2. Descripción Conjunta de Varias Variables Cuestiones de Verdadero/Falso 1. La covarianza mide la relación lineal entre dos variables, pero depende de las unidades de medida utilizadas. 2. El análisis
Álgebra Lineal Ma1010
 Álgebra Lineal Ma1010 Líneas y s en el Espacio Departamento de Matemáticas ITESM Líneas y s en el Espacio Álgebra Lineal - p. 1/34 Los conjuntos solución a un sistema de ecuaciones lineales cuando tienen
Álgebra Lineal Ma1010 Líneas y s en el Espacio Departamento de Matemáticas ITESM Líneas y s en el Espacio Álgebra Lineal - p. 1/34 Los conjuntos solución a un sistema de ecuaciones lineales cuando tienen
Carga de trabajo (Workload)
") La Carga de Trabajo Definición y Selección Prof. Mariela J. Curiel H. Carga de trabajo (Workload) Definición: El término carga de trabajo se usa para designar todos los requerimientos introducidos al sistema
La Carga de Trabajo Definición y Selección Prof. Mariela J. Curiel H. Carga de trabajo (Workload) Definición: El término carga de trabajo se usa para designar todos los requerimientos introducidos al sistema
Estadística Descriptiva
 M. en C. Juan Carlos Gutiérrez Matus Instituto Politécnico Nacional 2004 IPN UPIICSA c 2004 Juan C. Gutiérrez Matus Desde la segunda mitad del siglo anterior, el milagro industrial sucedido en Japón, hizo
M. en C. Juan Carlos Gutiérrez Matus Instituto Politécnico Nacional 2004 IPN UPIICSA c 2004 Juan C. Gutiérrez Matus Desde la segunda mitad del siglo anterior, el milagro industrial sucedido en Japón, hizo
Ideas Matemáticas en situaciones del Tablet. M. Soledad Montoya González
 T / / / Ideas Matemáticas en situaciones del Tablet M. Soledad Montoya González soledad.montoya@ucv.cl Intuitivamente podemos señalar que el razonamiento lógico matemático tiene que ver con el pensar.
T / / / Ideas Matemáticas en situaciones del Tablet M. Soledad Montoya González soledad.montoya@ucv.cl Intuitivamente podemos señalar que el razonamiento lógico matemático tiene que ver con el pensar.
PROGRAMACIÓN DE LOS CONTENIDOS DE MATEMÁTICAS EN LA PREPARACIÓN DE LA PARTE COMÚN DE LA PRUEBA DE ACCESO A LOS C.F.G.S. (Opción C)
") PROGRAMACIÓN DE LOS CONTENIDOS DE MATEMÁTICAS EN LA PREPARACIÓN DE LA PARTE COMÚN DE LA PRUEBA DE ACCESO A LOS C.F.G.S. (Opción C) I.E.S. Universidad Laboral de Málaga Curso 2015/2016 PROGRAMACIÓN DE LA
PROGRAMACIÓN DE LOS CONTENIDOS DE MATEMÁTICAS EN LA PREPARACIÓN DE LA PARTE COMÚN DE LA PRUEBA DE ACCESO A LOS C.F.G.S. (Opción C) I.E.S. Universidad Laboral de Málaga Curso 2015/2016 PROGRAMACIÓN DE LA
Qué son las fórmulas de Excel?
 Samayra Niebles Velasquez - 3012578750 Las fórmulas de Excel son lo que dan un tremendo poder a nuestras hojas de cálculo. Sin las fórmulas nuestras hojas de cálculo serían como cualquier otro documento
Samayra Niebles Velasquez - 3012578750 Las fórmulas de Excel son lo que dan un tremendo poder a nuestras hojas de cálculo. Sin las fórmulas nuestras hojas de cálculo serían como cualquier otro documento
UNIVERSIDAD MAYOR DE SAN SIMÓN FACULTAD DE CIENCIAS Y TECNOLOGÍA INGENIERÍA DE SISTEMAS BÚSQUEDA PRIMERO EL MEJOR
 UNIVERSIDAD MAYOR DE SAN SIMÓN FACULTAD DE CIENCIAS Y TECNOLOGÍA INGENIERÍA DE SISTEMAS BÚSQUEDA PRIMERO EL MEJOR INTEGRANTES: Caricari Cala Aquilardo Villarroel Fernandez Fructuoso DOCENTE: Lic. Garcia
UNIVERSIDAD MAYOR DE SAN SIMÓN FACULTAD DE CIENCIAS Y TECNOLOGÍA INGENIERÍA DE SISTEMAS BÚSQUEDA PRIMERO EL MEJOR INTEGRANTES: Caricari Cala Aquilardo Villarroel Fernandez Fructuoso DOCENTE: Lic. Garcia
Representación en el espacio de estado. Sistemas Control Embebidos e Instrumentación Electrónica UNIVERSIDAD EAFIT
 Representación en el espacio de estado Representación en espacio de estado Control clásico El modelado y control de sistemas basado en la transformada de Laplace, es un enfoque muy sencillo y de fácil
Representación en el espacio de estado Representación en espacio de estado Control clásico El modelado y control de sistemas basado en la transformada de Laplace, es un enfoque muy sencillo y de fácil
Matemáticas I Grado de Administración y Dirección de Empresas Examen de Febrero Curso 2011/ ?
 Matemáticas I Grado de Administración y Dirección de Empresas Examen de Febrero Curso 011/1 1) (1 punto) Dado el subespacio vectorial,,,,,,,,,,, a) Obtener la dimensión, unas ecuaciones implícitas, unas
Matemáticas I Grado de Administración y Dirección de Empresas Examen de Febrero Curso 011/1 1) (1 punto) Dado el subespacio vectorial,,,,,,,,,,, a) Obtener la dimensión, unas ecuaciones implícitas, unas
Aproximaciones Sucesivas.
 Aproximaciones Sucesivas. La Raíz Cuadrada. Te has preguntado cómo es que una calculadora hace sus cálculos? Por ejemplo, calcular la raíz cuadrada de un número dado, en las calculadoras científicas siempre
Aproximaciones Sucesivas. La Raíz Cuadrada. Te has preguntado cómo es que una calculadora hace sus cálculos? Por ejemplo, calcular la raíz cuadrada de un número dado, en las calculadoras científicas siempre
CONCEPTOS BÁSICOS (Freeman capt.1; Neural Nets capt. 4,5 y 7)
") Tema 1: Conceptos Básicos Sistemas Conexionistas 1 CONCEPTOS BÁSICOS (Freeman capt.1; Neural Nets capt. 4,5 y 7) 1.- Introducción. 1.1.- Redes Neuronales de Tipo Biológico. 1.2.- Redes Neuronales dirigidas
Tema 1: Conceptos Básicos Sistemas Conexionistas 1 CONCEPTOS BÁSICOS (Freeman capt.1; Neural Nets capt. 4,5 y 7) 1.- Introducción. 1.1.- Redes Neuronales de Tipo Biológico. 1.2.- Redes Neuronales dirigidas
Algoritmos y solución de problemas. Fundamentos de Programación Otoño 2008 Mtro. Luis Eduardo Pérez Bernal
 Algoritmos y solución de problemas Fundamentos de Programación Otoño 2008 Mtro. Luis Eduardo Pérez Bernal Introducción Departamento de Electrónica, Sistemas e Informática En las ciencias de la computación
Algoritmos y solución de problemas Fundamentos de Programación Otoño 2008 Mtro. Luis Eduardo Pérez Bernal Introducción Departamento de Electrónica, Sistemas e Informática En las ciencias de la computación
Cuestionario de Evaluación:
 Cuestionario de Evaluación: Dificultades encontradas en los colegios electorales Los símbolos pictográficos utilizados de ARASAAC ( http://catedu.es/arasaac/) Licencia CC ( BY-NC-SA) Plena inclusión quiere
Cuestionario de Evaluación: Dificultades encontradas en los colegios electorales Los símbolos pictográficos utilizados de ARASAAC ( http://catedu.es/arasaac/) Licencia CC ( BY-NC-SA) Plena inclusión quiere
CLASE Nº7. Patrones, series y regularidades numéricas
 CLASE Nº7 Patrones, series y regularidades numéricas Patrón numérico en la naturaleza Regularidades numéricas Patrones Espiral con triángulos rectángulos Series numéricas REGULARIDADES NUMÉRICAS Son series
CLASE Nº7 Patrones, series y regularidades numéricas Patrón numérico en la naturaleza Regularidades numéricas Patrones Espiral con triángulos rectángulos Series numéricas REGULARIDADES NUMÉRICAS Son series
1 LIMITES Y DERIVADAS
 1 LIMITES Y DERIVADAS 2.1 LA TANGENTE Y PROBLEMAS DE LA VELOCIDAD Problema de la tangente Se dice que la pendiente de la recta tangente a una curva en el punto P es el ite de las rectas secantes PQ a medida
1 LIMITES Y DERIVADAS 2.1 LA TANGENTE Y PROBLEMAS DE LA VELOCIDAD Problema de la tangente Se dice que la pendiente de la recta tangente a una curva en el punto P es el ite de las rectas secantes PQ a medida