TEORÍA DE CONTROL SISTEMAS DISCRETOS
|
|
|
- Rosa Bustos Belmonte
- hace 5 años
- Vistas:
Transcripción
1 EORÍA DE ONROL SISEMAS DISREOS









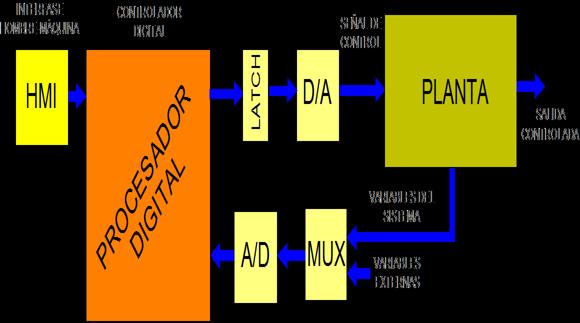
2 SISEMAS DISREOS ARQUIEURA DE UN SISEMA DE ONROL DIIAL oría d ontrol



3 SISEMAS DISREOS IPOS DE SEÑALES IEMPO ONINUO { ANALÓIAS UANIFIADAS IEMPO DISREO { NO UANIFIADAS DIIALES oría d ontrol
4 oría d ontrol SISEMAS DISREOS RANSFORMADA Z k k k x k x t x X Z Z para t para t xt ESALÓN UNIARIO... r X k a para k para k a k k x... a X a r a a a X k X x x x x x k
5 oría d ontrol at para t para t -at t x... X r X a a a a a para t para t t xt RAMPA UNIARIA X RANSFORMADA Z SISEMAS DISREOS
6 SISEMAS DISREOS RANSFORMADA Z PROPIEDADES Z a x t a X Z a x t b y t a X b Y k Z a x t Z Z n X a n n k x t n X x k k x t n X orma dl Valor inicial f lim F orma dl Valor Final f lim F oría d ontrol
7 SISEMAS DISREOS REENIÓN DE ORDEN ERO yt rspusta al impulso y t u t u t ut scalón s Y s s R s s s s RO s Y s s s s R s s X s s s t x t g t g d g t t t x t t g d g t oría d ontrol
8 SISEMAS DISREOS REENIÓN DE ORDEN ERO Z g t Y s R s s s s Y R Z Y R Y R Y s Z R s Z Z x t g t s s s oría d ontrol

9 SISEMAS DISREOS MUESREO MEDIANE IMPULSOS x t x k t k k t k t k k x t x t s s X s x x x... L X s x t x t... sk con s X s x k X k L oría d ontrol
10 SISEMAS DISREOS FUNIÓN RANSFERENIA DE PULSO Z k y t Y y k t x t x k t k k La rspusta d yt s la suma d las rspustas al impulso k y t g t x d x t g d t g t x t g t x g t x t yt... g t x g t x... g t k x k... k t k oría d ontrol
11 SISEMAS DISREOS FUNIÓN RANSFERENIA DE PULSO y t g t h x h h y k g k h x h h y k x k g k Y y k k k k m k h h Y g k h x h Y g m x h mh m h k Y gm. xh Y. X -m -h m h Sumatoria d onvolución oría d ontrol
12 SISEMAS DISREOS SISEMAS ON REARDO Y s Z X s s d Y d s Z X s Si d = N. Y N s Z X s oría d ontrol
13 SISEMAS DISREOS ABLA DE RANSFORMADA Z Si bin la transformada Z s dfin n l dominio tmporal xistn tablas qu prmitn transformar al plano Z xprsions rprsntadas n l campo transformado d Laplac. oría d ontrol
14 oría d ontrol SISEMAS DISREOS EJEMPLO: El siguints diagrama rprsnta un sistma mustrado d control. Obtnga una xprsión para la salida cuando s l aplica una ntrada Rs n forma d scalón d amplitud unitaria. E E V E R E R V R E E R E R E
15 oría d ontrol SISEMAS DISREOS EJEMPLO: E E V R E E E E R R E
16 oría d ontrol SISEMAS DISREOS EJEMPLO: E E V R R R R R


17 SISEMAS DISREOS orma dl mustro El torma dmustra qu la rconstrucción xacta d una sñal priódica continua n banda bas a partir d sus mustras, s matmáticamnt posibl si la sñal stá limitada n banda y la tasa d mustro s suprior al dobl d su ancho d banda. s s Aliasing oría d ontrol


18 SISEMAS DISREOS FILRO ANI ALIASIN oría d ontrol

19 SISEMAS DISREOS ONROL DISREO s s s U s s U s D R D s Z oría d ontrol

20 oría d ontrol ORRESPONDENIA ENRE EL PLANO S Y EL PLANO Z s s con k SISEMAS DISREOS

21 SISEMAS DISREOS ORRESPONDENIA ENRE EL PLANO S Y EL PLANO Z oría d ontrol
22 SISEMAS DISREOS ANÁLISIS DE ESABILIDAD V U s s Z R s s s s s s s Z P oría d ontrol
23 SISEMAS DISREOS ANÁLISIS DE ESABILIDAD, +, - -, P - -, 679, 679+, , 6,5,68,5,68,79599 ESABLE oría d ontrol


24 SISEMAS DISREOS ANÁLISIS DE ESABILIDAD K s s s s - -, 679, 679K +, 78 K=,9 K= oría d ontrol
25 SISEMAS DISREOS ANÁLISIS DE ESABILIDAD Si l priodo d mustro no s conocido Para =.9,9,94,978 Y los cros son = -,958 y = -,76 oría d ontrol


26 SISEMAS DISREOS ANÁLISIS DE ESABILIDAD oría d ontrol

27 oría d ontrol RANSFORMAIÓN BILINEAL w w w cos sn w W SISEMAS DISREOS
28 oría d ontrol w w w w si RANSFORMAIÓN BILINEAL s s tan cos sn w SISEMAS DISREOS w ,,4,6,8, w s


29 SISEMAS DISREOS RANSFORMAIÓN BILINEAL s s s s w 94 -, 788 w+, w- w w+,, +, - -, oría d ontrol
30 SISEMAS DISREOS APROXIMAIÓN DE LA REENIÓN DE ORDEN ERO RO sn s s s RO RO s s n n n sn n s n s RO s ns RO / oría d ontrol


31 SISEMAS DISREOS APROXIMAIÓN DE LA REENIÓN DE ORDEN ERO w / oría d ontrol
Regulación y Control de Máquinas Navales (RCMN)
") Regulación y Conrol de Máquinas Navales (RCMN) Problemas Resuelos Módulo 3. Análisis y Conrol de Sisemas en Cadena Cerrada G. Ojea, R. González de los Reyes, I. Díaz 04/0/08 PROBLEMA : En el sisema de
Regulación y Conrol de Máquinas Navales (RCMN) Problemas Resuelos Módulo 3. Análisis y Conrol de Sisemas en Cadena Cerrada G. Ojea, R. González de los Reyes, I. Díaz 04/0/08 PROBLEMA : En el sisema de
SISTEMAS MUESTREADOS
 SISEMAS MUESREADOS DR. ASIL M. AL HADIHI SISEMAS MUESREADOS Mutro d ñal Etudio n frcuncia dl mutro orma dl mutro Rcontrucción idal loquador caual Sitma mutrado écnica d tudio d itma mutrado Rprntación
SISEMAS MUESREADOS DR. ASIL M. AL HADIHI SISEMAS MUESREADOS Mutro d ñal Etudio n frcuncia dl mutro orma dl mutro Rcontrucción idal loquador caual Sitma mutrado écnica d tudio d itma mutrado Rprntación
Implementación de un Regulador PID
 Tma 3 Implmntación d un Rgulador PID Gijón - Marzo 22 .4 Accions d Control Clásicas.2 x(t).8.6 x(t) (t) _ P I D 2 3 u(t) Sistma.4.8.6.4.2-5 5 5 2 25 3 (t) -.2 -.4-5 5 5 2 25 3 2.8 - Proporcional ( t) =
Tma 3 Implmntación d un Rgulador PID Gijón - Marzo 22 .4 Accions d Control Clásicas.2 x(t).8.6 x(t) (t) _ P I D 2 3 u(t) Sistma.4.8.6.4.2-5 5 5 2 25 3 (t) -.2 -.4-5 5 5 2 25 3 2.8 - Proporcional ( t) =

Motivación. Gran parte de las señales de nuestra experiencia cotidiana son continuas; sin embargo, cada vez más, se procesan digitalmente.
 c Luis Vielva, Grupo de raamieno Avanzado de Señal. Dp. Ingeniería de Comunicaciones. Universidad de Canabria. Señales y sisemas. ema 5: Muesreo. OpenCourseWare p. /?? ema 5: Muesreo. Moivación. 2. Esquema.
c Luis Vielva, Grupo de raamieno Avanzado de Señal. Dp. Ingeniería de Comunicaciones. Universidad de Canabria. Señales y sisemas. ema 5: Muesreo. OpenCourseWare p. /?? ema 5: Muesreo. Moivación. 2. Esquema.
TEMA I. Señales y sistemas de tiempo discreto. Señales en tiempo discreto. Ejemplos de secuencias (1) = Escalón unitario:
 = Escalón unitario:") TEMA I Sñals y sistmas d timpo discrto II. Análisis d sñals n timpo discrto. Introducción. Sñals d timpo discrto. Sistmas d timpo discrto. Sistmas linals invariants n l timpo (LIT. Propidads d los sistmas
TEMA I Sñals y sistmas d timpo discrto II. Análisis d sñals n timpo discrto. Introducción. Sñals d timpo discrto. Sistmas d timpo discrto. Sistmas linals invariants n l timpo (LIT. Propidads d los sistmas
a) lim x lim senx sen lim lim lim lim lim x x 2 lim Ejercicio nº 1.- Calcula: Solución: Ejercicio nº 2.-
 lim x lim senx sen lim lim lim lim lim x x 2 lim Ejercicio nº 1.- Calcula: Solución: Ejercicio nº 2.-") Ejrcicio nº.- Calcula: c) 8 sn Evaluación: Fcha: c) 8 sn sn Ejrcicio nº.- Calcula l siguint it y studia l comportaminto d la unción por la izquirda y por la drcha d : Calculamos los its latrals: Ejrcicio
Ejrcicio nº.- Calcula: c) 8 sn Evaluación: Fcha: c) 8 sn sn Ejrcicio nº.- Calcula l siguint it y studia l comportaminto d la unción por la izquirda y por la drcha d : Calculamos los its latrals: Ejrcicio
CONTROL PID DEL ÁNGULO DE CABECEO DE UN HELICÓPTERO
 CONROL EL ÁNGULO E CABECEO E UN HELCÓERO F. Morilla SEÑO OR EAAS Canclación d la dinámica subamortiguada impo d asntaminto d la rspusta tmporal Rstriccions n la sñal d control Estructura d control y filtro
CONROL EL ÁNGULO E CABECEO E UN HELCÓERO F. Morilla SEÑO OR EAAS Canclación d la dinámica subamortiguada impo d asntaminto d la rspusta tmporal Rstriccions n la sñal d control Estructura d control y filtro
Tema 2. Análisis de Sistemas en Tiempo Continuo. Indice:
 Indice: 1. Clasificación de Sistemas en tiempo continuo Lineales y no Lineales Invariante y Variantes en el tiempo Causal y no Causal Estable e Inestables Con y sin Memoria 2. La Convolución La Integral
Indice: 1. Clasificación de Sistemas en tiempo continuo Lineales y no Lineales Invariante y Variantes en el tiempo Causal y no Causal Estable e Inestables Con y sin Memoria 2. La Convolución La Integral
MUESTREO Y RECONSTRUCCIÓN DE SEÑALES. Teoría de circuitos y sistemas
 MUESREO Y RECONSRUCCIÓN DE SEÑALES oría d circuios y sismas Inroducción Sabmos modlar sismas coninuos Laplac o sismas discros Z. Pro n muchos casos los sismas coninn ano bloqus coninuos como bloqus discros.
MUESREO Y RECONSRUCCIÓN DE SEÑALES oría d circuios y sismas Inroducción Sabmos modlar sismas coninuos Laplac o sismas discros Z. Pro n muchos casos los sismas coninn ano bloqus coninuos como bloqus discros.
PROBLEMAS PROPUESTOS. TEMAS 1 A 4 SOLUCIONES
 Grado en Ingeniería Mecánica Teoría de Sistemas PROBLEMAS PROPUESTOS. TEMAS A 4 SOLUCIONES PROBLEMA. Cálculo de transformada de Laplace a) Por aplicación de la definición de la transformada. Aplicando
Grado en Ingeniería Mecánica Teoría de Sistemas PROBLEMAS PROPUESTOS. TEMAS A 4 SOLUCIONES PROBLEMA. Cálculo de transformada de Laplace a) Por aplicación de la definición de la transformada. Aplicando
SISTEMAS DISCRETOS. 1. Qué son?
 SISTEMAS DISCRETOS. Qué sn? Sn sisemas que rabajan cn das muesreads Ess sisemas sn cnrlads pr cmpuadr Ls cnrladres se desarrllan en cmpuadres. Ejempl de das muesreads Prces Reenr Muesreadr D/A Cmpuadr
SISTEMAS DISCRETOS. Qué sn? Sn sisemas que rabajan cn das muesreads Ess sisemas sn cnrlads pr cmpuadr Ls cnrladres se desarrllan en cmpuadres. Ejempl de das muesreads Prces Reenr Muesreadr D/A Cmpuadr
Ejercicios 17/18 Lección 6. Funciones Calcula el dominio de definición y el recorrido de las funciones siguientes a) p(x) = x(x + 1)(x + 2)
 p(x) = x(x + 1)(x + 2)") Ejrcicios 7/8 Lcción 6 Funcions Dtrmina los intrvalos d gno constant d la función f() + 6 + Calcula l dominio d dfinición y l rcorrido d las funcions guints p() ( + )( + ) 7 f ( ) 0 + 0 7 d) ) h( ) 9 9+
Ejrcicios 7/8 Lcción 6 Funcions Dtrmina los intrvalos d gno constant d la función f() + 6 + Calcula l dominio d dfinición y l rcorrido d las funcions guints p() ( + )( + ) 7 f ( ) 0 + 0 7 d) ) h( ) 9 9+
Lectura 2: Diseño de Sistemas de Control mediante la Respuesta de Frecuencia
 SISEMAS DE ONROL AUOMÁIO DAI-EPN Lectura 2: Diseño de Sistemas de ontrol mediante la Respuesta de Frecuencia Lecturas recomendadas ap., pags. 74-759, Sistemas de ontrol Automático, KUO Benjamín, Séptima
SISEMAS DE ONROL AUOMÁIO DAI-EPN Lectura 2: Diseño de Sistemas de ontrol mediante la Respuesta de Frecuencia Lecturas recomendadas ap., pags. 74-759, Sistemas de ontrol Automático, KUO Benjamín, Séptima
Sistemas Lineales. Tema 7. Problemas
 Sistemas Lineales ema 7. Problemas. Se sabe que una señal de valor real x(t) ha sido determinada sólo por sus muestras cuando la frecuencia de muestreo es s = 0 4 π. Para qué valores de se garantiza que
Sistemas Lineales ema 7. Problemas. Se sabe que una señal de valor real x(t) ha sido determinada sólo por sus muestras cuando la frecuencia de muestreo es s = 0 4 π. Para qué valores de se garantiza que
CARACTERÍSTICAS EXTERNAS y REGULACIÓN de TRANSFORMADORES
 CARACTERÍSTCAS EXTERNAS y REGLACÓN d TRANSFORMADORES Norbrto A. Lmozy 1 CARACTERÍSTCAS EXTERNAS S dnomina variabl ntr a una magnitud qu stá dtrminada ntr dos puntos, tal como una difrncia d potncial o
CARACTERÍSTCAS EXTERNAS y REGLACÓN d TRANSFORMADORES Norbrto A. Lmozy 1 CARACTERÍSTCAS EXTERNAS S dnomina variabl ntr a una magnitud qu stá dtrminada ntr dos puntos, tal como una difrncia d potncial o
3. [2014] [JUN-A] Calcule el área de la región plana limitada por la gráfica de la función f(x) = cos x, el eje OX y las rectas x = 0 y x = 2.
![3. [2014] [JUN-A] Calcule el área de la región plana limitada por la gráfica de la función f(x) = cos x, el eje OX y las rectas x = 0 y x = 2.](/thumbs/70/62939986.jpg "3. [2014] [JUN-A] Calcule el área de la región plana limitada por la gráfica de la función f(x) = cos x, el eje OX y las rectas x = 0 y x = 2.") MasMats.com Colccions d jrcicios Intgrals Slctividad CCNN Extrmadura. [04] [ET-A] Calcul la siguint intgral dfinida d una función racional: + x- x -x+. [04] [ET-B] a) Dibuj l rcinto plano limitado por
MasMats.com Colccions d jrcicios Intgrals Slctividad CCNN Extrmadura. [04] [ET-A] Calcul la siguint intgral dfinida d una función racional: + x- x -x+. [04] [ET-B] a) Dibuj l rcinto plano limitado por
Transformadas Básicas. Requerimientos: Integral Impropia TRANSFORMADA DE LAPLACE:
 Transformadas Básicas Requerimientos: Integral Impropia si limite TRANSFORMADA DE LAPLACE: La transformada de Laplace de una función está definida por: Para obtener su transformación solo debemos multiplicar
Transformadas Básicas Requerimientos: Integral Impropia si limite TRANSFORMADA DE LAPLACE: La transformada de Laplace de una función está definida por: Para obtener su transformación solo debemos multiplicar
EJERCICIOS RESUELTOS DE FUNCIONES REALES DE VARIABLE REAL
 EJERCICIOS RESUELTOS DE FUNCIONES REALES DE VARIABLE REAL. Calcular los dominios d dfinición d las siguints funcions: a) f( ) 6 b) f( ) c) f( ) ln d) f( ) arctg 3 4 ) f( ) f) f( ) 5 g) f( ) sn 9 h) 4 4
EJERCICIOS RESUELTOS DE FUNCIONES REALES DE VARIABLE REAL. Calcular los dominios d dfinición d las siguints funcions: a) f( ) 6 b) f( ) c) f( ) ln d) f( ) arctg 3 4 ) f( ) f) f( ) 5 g) f( ) sn 9 h) 4 4
Sistemas Lineales. Examen de Junio SOluciones
 . Considere la señal xt) sinπt) Sistemas Lineales Examen de Junio 22. SOluciones a) Obtenga su transformada de Fourier, X), y represéntela para 7π. b) Calcule la potencia y la energía de xt). c) Considere
. Considere la señal xt) sinπt) Sistemas Lineales Examen de Junio 22. SOluciones a) Obtenga su transformada de Fourier, X), y represéntela para 7π. b) Calcule la potencia y la energía de xt). c) Considere
Una onda es una perturbación que se propaga y transporta energía.
 Onda Una onda s una prturbación qu s propaga y transporta nrgía. La onda qu transmit un látigo llva una nrgía qu s dscarga n su punta al golpar. TIPOS DE ONDAS Si las partículas dl mdio n l qu s propaga
Onda Una onda s una prturbación qu s propaga y transporta nrgía. La onda qu transmit un látigo llva una nrgía qu s dscarga n su punta al golpar. TIPOS DE ONDAS Si las partículas dl mdio n l qu s propaga
Tabla 4.1. x R (t) Cuantificador L niveles. f M muestras/s. Figura 4.23
 Cuantificador L niveles. f M muestras/s. Figura 4.23") 4.4 Codificación El codificador asigna un código binario a cada nivel de salida del cuanificador. Así si el cuanificador iene L niveles habrá 2 n =L códigos disinos, donde cada palabra de código se corresponde
4.4 Codificación El codificador asigna un código binario a cada nivel de salida del cuanificador. Así si el cuanificador iene L niveles habrá 2 n =L códigos disinos, donde cada palabra de código se corresponde
Sistemas Lineales. Tema 5. Muestreo. h[n] x(t)
![Sistemas Lineales. Tema 5. Muestreo. h[n] x(t)](/thumbs/78/78243524.jpg "Sistemas Lineales. Tema 5. Muestreo. h[n] x(t)") Sisemas Lineales ema 5. Muesreo 1 Inroducción rabajamos con sisemas discreos porque es más úil rabajr con precesadores digiales. Para ello va a ser necesario definir un proceso que reanforme las señales
Sisemas Lineales ema 5. Muesreo 1 Inroducción rabajamos con sisemas discreos porque es más úil rabajr con precesadores digiales. Para ello va a ser necesario definir un proceso que reanforme las señales
Convolución. Dr. Luis Javier Morales Mendoza Procesamiento Analógico de Señales FIEC - UV
 Dr. Luis Javier Morales Mendoza Procesamieno Analógico de Señales FIEC - UV Índice.. Inroducción.. La función dela de Dirac.3. Definición de la convolución.3.. propiedades de la convolución.3.. Méodo Gráfico
Dr. Luis Javier Morales Mendoza Procesamieno Analógico de Señales FIEC - UV Índice.. Inroducción.. La función dela de Dirac.3. Definición de la convolución.3.. propiedades de la convolución.3.. Méodo Gráfico
Ejercicios 16/17 Lección 6. Funciones Calcula el dominio de definición y el recorrido de las funciones siguientes a) p(x) = x(x + 1)(x + 2)
 p(x) = x(x + 1)(x + 2)") Ejrcicios 6/7 Lcción 6. Funcions.. Dtrmina los intrvalos d gno constant d la función f() + 6 +. Calcula l dominio d dfinición y l rcorrido d las funcions guints p() ( + )( + ) 7 f ( ) 0 + 0 7 d) ) h( )
Ejrcicios 6/7 Lcción 6. Funcions.. Dtrmina los intrvalos d gno constant d la función f() + 6 +. Calcula l dominio d dfinición y l rcorrido d las funcions guints p() ( + )( + ) 7 f ( ) 0 + 0 7 d) ) h( )
Colección de problemas del Curso 05/06 Circuitos Electrónicos. 2º Ing. Aeronáutico Dpto. de Ingeniería Electrónica
 Colección de problemas del Curso 05/06 Circuios Elecrónicos. º Ing. Aeronáuico Dpo. de Ingeniería Elecrónica Problema. Calcule la ransformada de Fourier, G(), de las siguienes funciones: + a) g = e u(
Colección de problemas del Curso 05/06 Circuios Elecrónicos. º Ing. Aeronáuico Dpo. de Ingeniería Elecrónica Problema. Calcule la ransformada de Fourier, G(), de las siguienes funciones: + a) g = e u(
SEÑALES Y SISTEMAS I TABLAS. Dpto. Teoría de la Señal y Comunicaciones
 SEÑALES Y SISEMAS I ABLAS Dpo. orí d l Sñl y Comuiccios POPIEDADES DE LA ASFOMADA DE LAPLACE Propidd Sñl rsformd OC ( ) ( ) ( ) s () ( s) ( s) Lilidd () + b ( ) ( s) b ( s) Dsplzmio l impo ( ) Dsplzmio
SEÑALES Y SISEMAS I ABLAS Dpo. orí d l Sñl y Comuiccios POPIEDADES DE LA ASFOMADA DE LAPLACE Propidd Sñl rsformd OC ( ) ( ) ( ) s () ( s) ( s) Lilidd () + b ( ) ( s) b ( s) Dsplzmio l impo ( ) Dsplzmio
Análisis de Señales. Descripción matemática de señales
 Análisis d Sñals Dscripción mamáica d sñals Sñals Las sñals son funcions d variabls indpndins, poradoras d información Sñals lécricas:nsions y corrins n un circuio Sñals acúsicas: audio Sñals d vido: variación
Análisis d Sñals Dscripción mamáica d sñals Sñals Las sñals son funcions d variabls indpndins, poradoras d información Sñals lécricas:nsions y corrins n un circuio Sñals acúsicas: audio Sñals d vido: variación
Soluciones a los ejercicios propuestos Unidad 1. El conjunto de los números reales Matemáticas aplicadas a las Ciencias Sociales I
 Solucions a los jrcicios propustos Unidad. El conjunto d los númros rals Matmáticas aplicadas a las Cincias Socials I NÚMEROS RACIONALES Y NÚMEROS IRRACIONALES. Dtrmina si los siguints númros son o no
Solucions a los jrcicios propustos Unidad. El conjunto d los númros rals Matmáticas aplicadas a las Cincias Socials I NÚMEROS RACIONALES Y NÚMEROS IRRACIONALES. Dtrmina si los siguints númros son o no
INSTITUTO TECNOLÓGICO DE COSTA RICA ESCUELA DE INGENIERÍA ELECTRÓNICA CURSO: MODELOS DE SISTEMAS CÁLCULO DE RESIDUOS Y SUS APLICACIONES
 INSTITUTO TENOLÓGIO DE OSTA RIA ESUELA DE INGENIERÍA ELETRÓNIA URSO: MODELOS DE SISTEMAS ÁLULO DE RESIDUOS Y SUS APLIAIONES ING. FAUSTINO MONTES DE OA FEBRERO DE álculo d Rsiduos y sus Aplicacions INDIE
INSTITUTO TENOLÓGIO DE OSTA RIA ESUELA DE INGENIERÍA ELETRÓNIA URSO: MODELOS DE SISTEMAS ÁLULO DE RESIDUOS Y SUS APLIAIONES ING. FAUSTINO MONTES DE OA FEBRERO DE álculo d Rsiduos y sus Aplicacions INDIE
SEÑALES Y SISTEMAS. PROBLEMAS RESUELTOS. CAPITULO V PROBLEMA 1: Problema Nº 5.34 Oppenheim
 SEÑALES Y SISTEMAS. PROBLEMAS RESUELTOS. CAPITULO V PROBLEMA : Problma Nº 5.3 Opphim Obsrv l siguit sistma: Dtrmi y() Solució: El traycto d arriba produc, al multiplicar por Cos(/), traslació dl spctro
SEÑALES Y SISTEMAS. PROBLEMAS RESUELTOS. CAPITULO V PROBLEMA : Problma Nº 5.3 Opphim Obsrv l siguit sistma: Dtrmi y() Solució: El traycto d arriba produc, al multiplicar por Cos(/), traslació dl spctro
Prof: Zulay Franco Puerto Ordaz, noviembre
 56 Monostabls y Astabls 3.1 Introducción 3.2 Monostabl Es un circuito lctrónico qu dispon d una sñal d ntrada, gnralmnt dnominada disparo, al activars sta ntrada n la salida dl circuito (Q s obtin un pulso
56 Monostabls y Astabls 3.1 Introducción 3.2 Monostabl Es un circuito lctrónico qu dispon d una sñal d ntrada, gnralmnt dnominada disparo, al activars sta ntrada n la salida dl circuito (Q s obtin un pulso
SISTEMAS LINEALES TABLAS. Dpto. Teoría de la Señal y Comunicaciones
 SISEMAS LIEALES ABLAS Dpo. orí d l Sñl y Comuiccios POPIEDADES DE LA ASFOMADA DE LAPLACE Propidd Sñl rsformd OC ( ) ( ) ( ) s ( s) ( s) Lilidd + b ( ) ( s) b ( s) Dsplmio l impo ( ) Dsplmio l domiio s
SISEMAS LIEALES ABLAS Dpo. orí d l Sñl y Comuiccios POPIEDADES DE LA ASFOMADA DE LAPLACE Propidd Sñl rsformd OC ( ) ( ) ( ) s ( s) ( s) Lilidd + b ( ) ( s) b ( s) Dsplmio l impo ( ) Dsplmio l domiio s
UNIVERSIDAD NACIONAL AUTONOMA DE MEXICO FACULTAD DE INGENIERIA ANALISIS DE SISTEMAS Y SEÑALES TAREA. TRANSFORMADAS LAPLACE, FOURIER, Z
 UNIVERSIDAD NACIONAL AUTONOMA DE MEXICO FACULTAD DE INGENIERIA ANALISIS DE SISTEMAS Y SEÑALES TAREA. TRANSFORMADAS LAPLACE, FOURIER, Z ALUMNOS: CRUZ NAVARRO JESUS ALBARRÁN DÍAZ KARLA GRUPO: 4 SEMESTRE:
UNIVERSIDAD NACIONAL AUTONOMA DE MEXICO FACULTAD DE INGENIERIA ANALISIS DE SISTEMAS Y SEÑALES TAREA. TRANSFORMADAS LAPLACE, FOURIER, Z ALUMNOS: CRUZ NAVARRO JESUS ALBARRÁN DÍAZ KARLA GRUPO: 4 SEMESTRE:
Modelado en el dominio de la frecuencia Utilizar la transformada Laplace para representar ecuaciones diferenciales lineales
 2.3 OBJETIVOS Transformada Laplace (Repaso) Modelado en el dominio de la frecuencia Utilizar la transformada Laplace para representar ecuaciones diferenciales lineales CONTENIDOS Transformada de Laplace
2.3 OBJETIVOS Transformada Laplace (Repaso) Modelado en el dominio de la frecuencia Utilizar la transformada Laplace para representar ecuaciones diferenciales lineales CONTENIDOS Transformada de Laplace
x(t) 0 T 2T 3T 4T x(k) = {0, 3, 2.7, 2.2, 2.7, } x k = Redondear( x*(k T) )
 0 T 2T 3T 4T x(k) = {0, 3, 2.7, 2.2, 2.7, } x k = Redondear( x*(k T) )") SISEMAS DE DAOS MUESREADOS x() Muesreo x*() A/D x() Señal coninua x() : periodo de muesreo 1 1 = =(s) fm = f m =(Hz) 2 π ωm = 2 π fm = = ( rad / s) x*() 2 3 4 = {, 3, 2.7, 2.2, 2.7, } x = Redondear( x*()
SISEMAS DE DAOS MUESREADOS x() Muesreo x*() A/D x() Señal coninua x() : periodo de muesreo 1 1 = =(s) fm = f m =(Hz) 2 π ωm = 2 π fm = = ( rad / s) x*() 2 3 4 = {, 3, 2.7, 2.2, 2.7, } x = Redondear( x*()
Prof: Zulay Franco Puerto Ordaz, noviembre
 56 Monostabls y Astabls 3.1 Introducción 3.2 Monostabl Es un circuito lctrónico capaz d gnrar un pulso lógico n alto o n bajo a través d su salida (Q. El timpo d duración dl pulso w, stá dtrminado por
56 Monostabls y Astabls 3.1 Introducción 3.2 Monostabl Es un circuito lctrónico capaz d gnrar un pulso lógico n alto o n bajo a través d su salida (Q. El timpo d duración dl pulso w, stá dtrminado por
Reguladores de compensación
 Rgulaors compnsación Dfinimos la salia saa para l sistma m D N La función transfrncia gnraliaa pos un rtaro ao por m. n n n q q q q A a a a b b b b G 0 0 Conicions: 0 q b, timpo murto la planta, G tin
Rgulaors compnsación Dfinimos la salia saa para l sistma m D N La función transfrncia gnraliaa pos un rtaro ao por m. n n n q q q q A a a a b b b b G 0 0 Conicions: 0 q b, timpo murto la planta, G tin
INSTITUTO TECNOLÓGICO DE MASSACHUSETTS Departamento de Ingeniería Eléctrica e Informática
 INSTITUTO TECNOLÓGICO DE MASSACHUSETTS Departamento de Ingeniería Eléctrica e Informática 6.003: Señales y sistemas Otoño 2003 Examen final Martes 16 de diciembre de 2003 Instrucciones: El examen consta
INSTITUTO TECNOLÓGICO DE MASSACHUSETTS Departamento de Ingeniería Eléctrica e Informática 6.003: Señales y sistemas Otoño 2003 Examen final Martes 16 de diciembre de 2003 Instrucciones: El examen consta
La Transformada Z. Asignaturas: Análisis de Sistemas y Señales Control Digital
 - La ransformada Z Asignaturas: Análisis de Sistemas y Señales Control Digital M.I. Ricardo Garibay Jiméne Mayo 997 EMA 8. RANSFORMADA Z 8. DEFINICIÓN Y RELACIÓN CON LA RANSFORMADA DE FOURIER EN IEMPO
- La ransformada Z Asignaturas: Análisis de Sistemas y Señales Control Digital M.I. Ricardo Garibay Jiméne Mayo 997 EMA 8. RANSFORMADA Z 8. DEFINICIÓN Y RELACIÓN CON LA RANSFORMADA DE FOURIER EN IEMPO
IV. Vibración bajo condiciones forzadas generales
 Objetivos: 1. Reconocer que existen excitaciones periódicas no harmónicas y no periódicas.. Analizar la respuesta de un sistema de primer y de segundo orden bajo una fuerza periódica general. 3. Analizar
Objetivos: 1. Reconocer que existen excitaciones periódicas no harmónicas y no periódicas.. Analizar la respuesta de un sistema de primer y de segundo orden bajo una fuerza periódica general. 3. Analizar
( ) 1. Halla el dominio de continuidad y clasifica las discontinuidades de las siguientess funciones: x 1. x 4. = x 2. = x. b) f ( x) x 4x.
 1. Halla el dominio de continuidad y clasifica las discontinuidades de las siguientess funciones: x 1. x 4. = x 2. = x. b) f ( x) x 4x.") º Bacillrato d CCNN. Halla l dominio d continuidad y claica las discontinuidads d las guintss uncions: a b c ln d g i j 7 k l 8 m 6 n 6 o p q r s t u v w y z ln. Halla l dominio d continuidad y claica
º Bacillrato d CCNN. Halla l dominio d continuidad y claica las discontinuidads d las guintss uncions: a b c ln d g i j 7 k l 8 m 6 n 6 o p q r s t u v w y z ln. Halla l dominio d continuidad y claica
Facultad de Ingeniería en Electrónica y Comunicaciones. Nombre del alumno: Erik Alan Fuentes Pérez. Experiencia educativa:
 UV Facultad de Ingeniería en Electrónica y Comunicaciones Nombre del alumno: Erik Alan Fuentes Pérez Experiencia educativa: Procesamiento Analógico de Señales (PAS) Numero de laboratorio: Tarea 09 Nombre
UV Facultad de Ingeniería en Electrónica y Comunicaciones Nombre del alumno: Erik Alan Fuentes Pérez Experiencia educativa: Procesamiento Analógico de Señales (PAS) Numero de laboratorio: Tarea 09 Nombre
TEMA 1: Los números reales. Tema 1: Los números reales 1
 TEMA 1: Los númros rals Tma 1: Los númros rals 1 ESQUEMA DE LA UNIDAD 1.- Númros naturals y ntros. 2.- Númros racionals. 3.- Númros irracionals. 4.- Númros rals. 5.- Jrarquía n las opracions combinadas.
TEMA 1: Los númros rals Tma 1: Los númros rals 1 ESQUEMA DE LA UNIDAD 1.- Númros naturals y ntros. 2.- Númros racionals. 3.- Númros irracionals. 4.- Númros rals. 5.- Jrarquía n las opracions combinadas.
Problemas Tema 9 Solución a problemas de derivadas - Hoja 1 - Todos resueltos
 página 1/5 Problmas Tma 9 Solución a problmas d drivadas - Hoja 1 - Todos rsultos Hoja 1. Problma 1 1. a) Driva y simplifica f (x)= 7 cos 7 ( x+1) b) Driva y simplifica f (x)= x +cos(x) + sn( x) c) Estudia
página 1/5 Problmas Tma 9 Solución a problmas d drivadas - Hoja 1 - Todos rsultos Hoja 1. Problma 1 1. a) Driva y simplifica f (x)= 7 cos 7 ( x+1) b) Driva y simplifica f (x)= x +cos(x) + sn( x) c) Estudia
TEMA 1: Los números reales. Tema 1: Los números reales 1
 TEMA 1: Los númros rals Tma 1: Los númros rals 1 ESQUEMA DE LA UNIDAD 1.- Númros naturals y ntros. 2.- Númros racionals. 3.- Númros irracionals. 4.- Númros rals. 5.- Jrarquía n las opracions combinadas.
TEMA 1: Los númros rals Tma 1: Los númros rals 1 ESQUEMA DE LA UNIDAD 1.- Númros naturals y ntros. 2.- Númros racionals. 3.- Númros irracionals. 4.- Númros rals. 5.- Jrarquía n las opracions combinadas.
Análisis de Sistemas Lineales: segunda parte
 UCV, Facultad de Ingeniería, Escuela de Ingeniería Eléctrica. Análisis de Sistemas Lineales: segunda parte Ebert Brea 7 de marzo de 204 Contenido. Análisis de sistemas en el plano S 2. Análisis de sistemas
UCV, Facultad de Ingeniería, Escuela de Ingeniería Eléctrica. Análisis de Sistemas Lineales: segunda parte Ebert Brea 7 de marzo de 204 Contenido. Análisis de sistemas en el plano S 2. Análisis de sistemas
Análisis de Señales Curso Teorema del muestreo Conversión A/D
 Análisis de Señales Curso 2011 Teorema del muestreo Conversión A/D Muestreo Muestreo con tren de impulsos p(t) x(t) x p (t) x(0) x(t) x(t) x p (t) t 1 p(t) 0 0 t T x p ( t) = x( t) p( t) + n= p ( t) =
Análisis de Señales Curso 2011 Teorema del muestreo Conversión A/D Muestreo Muestreo con tren de impulsos p(t) x(t) x p (t) x(0) x(t) x(t) x p (t) t 1 p(t) 0 0 t T x p ( t) = x( t) p( t) + n= p ( t) =
+ ( + ) ( ) + ( + ) ( ) ( )
 ( ) + ( + ) ( ) ( )") latrals n. iguals. f. La función CONTINUIDAD f () Es continua n l punto?. Calcular los límits ³ ² 5 Para qu la función sa continua n s db cumplir: f f Calculamos por sparado cada mimbro d la igualdad f
latrals n. iguals. f. La función CONTINUIDAD f () Es continua n l punto?. Calcular los límits ³ ² 5 Para qu la función sa continua n s db cumplir: f f Calculamos por sparado cada mimbro d la igualdad f
Sistemas Lineales. Problemas de Muestreo (V2.0)
") Sistemas Lineales Problemas de Muestreo (V2.0). Una señal continua x(t) se obtiene a la salida de un filtro pasobajo ideal con frecuencia de corte c = 000π. Si el muestreo con tren de impulsos se realiza
Sistemas Lineales Problemas de Muestreo (V2.0). Una señal continua x(t) se obtiene a la salida de un filtro pasobajo ideal con frecuencia de corte c = 000π. Si el muestreo con tren de impulsos se realiza
DERIVADAS. Las gráficas A, B y C son las funciones derivadas de las gráficas 1, 2 y 3, pero en otro orden. = 0 utilizando la definición.
 DERIVADAS Dinición d drivada Ejrcicio nº.- Las gráicas A, B y C son las uncions drivadas d las gráicas, y, pro n otro ordn. Cuál s la drivada d cual? Justiica tus rspustas. Ejrcicio nº.- Calcula la drivada
DERIVADAS Dinición d drivada Ejrcicio nº.- Las gráicas A, B y C son las uncions drivadas d las gráicas, y, pro n otro ordn. Cuál s la drivada d cual? Justiica tus rspustas. Ejrcicio nº.- Calcula la drivada
Circuitos SC (Switched Capacitors)
") ircuitos S (Switched apacitors) V I V I O V O V I V I O V O Q T S φ 1 : se carga hasta V = V I φ 2 : se descarga hasta V = V O ; Q = (V I V O ) orriente promedio: Î = Q T s = (V I V O ) T s = (V I V O
ircuitos S (Switched apacitors) V I V I O V O V I V I O V O Q T S φ 1 : se carga hasta V = V I φ 2 : se descarga hasta V = V O ; Q = (V I V O ) orriente promedio: Î = Q T s = (V I V O ) T s = (V I V O
Análisis de Sistemas y Señales: Transformadas de Laplace, Z y Fourier. ÍNDICE. Transformadas de Laplace. 3. Transformada de Fourier.
 Análisis de Sistemas y Señales Transformadas: Laplace, Z y Fourier. F L Z Alumnos: Anzures Robles Jorge Garcíaa Luciano Laura Quezada Borja Arnulfo Rojas Arteaga I. Karina Román Guadarrama José Roque Grupo:
Análisis de Sistemas y Señales Transformadas: Laplace, Z y Fourier. F L Z Alumnos: Anzures Robles Jorge Garcíaa Luciano Laura Quezada Borja Arnulfo Rojas Arteaga I. Karina Román Guadarrama José Roque Grupo:
El modelo matemático tiende a ser lo más simple posible, con una representación. A la hora de desarrollar un modelo matemático:
 Modelo matemático de procesos 1. Modelo Matemático Un modelo matemático muy exacto implica un desarrollo matemático muy complejo. Por el contrario, un modelo matemático poco fino nos deparará un desarrollo
Modelo matemático de procesos 1. Modelo Matemático Un modelo matemático muy exacto implica un desarrollo matemático muy complejo. Por el contrario, un modelo matemático poco fino nos deparará un desarrollo
Y ANÁLISIS DE SISTEMAS
 DEPARTAMENTO DE MECÁNICA FACULTAD DE CIENCIAS EXÁCTAS Y TECNOLOGÍA UNIVERSIDAD NACIONAL DE TUCUMÁN INSTRODUCCIÓN AL MODELO Y ANÁLISIS DE SISTEMAS 1 Modelos y análisis de sistemas (conceptos generales)
DEPARTAMENTO DE MECÁNICA FACULTAD DE CIENCIAS EXÁCTAS Y TECNOLOGÍA UNIVERSIDAD NACIONAL DE TUCUMÁN INSTRODUCCIÓN AL MODELO Y ANÁLISIS DE SISTEMAS 1 Modelos y análisis de sistemas (conceptos generales)
EXAMEN DE FUNDAMENTOS DE SONIDO E IMAGEN PARTE 1 APELLIDOS, NOMBRE:
 DEPARTAMENTO DE INGENIERÍA AUDIOVISUAL Y COMUNICACIONES ESCUELA UNIVERSITARIA DE INGENIERÍA TÉCNICA DE TELECOMUNICACIÓN UNIVERSIDAD POLITÉCNICA DE MADRID EXAMEN DE FUNDAMENTOS DE SONIDO E IMAGEN PARTE
DEPARTAMENTO DE INGENIERÍA AUDIOVISUAL Y COMUNICACIONES ESCUELA UNIVERSITARIA DE INGENIERÍA TÉCNICA DE TELECOMUNICACIÓN UNIVERSIDAD POLITÉCNICA DE MADRID EXAMEN DE FUNDAMENTOS DE SONIDO E IMAGEN PARTE
LÍMITES DE FUNCIONES. CONTINUDAD
 LÍMITES DE FUNCIONES. CONTINUDAD Signiicado dl it Ejrcicio nº.- Rprsnta gráicamnt y plica l gniicado d la prón: Ejrcicio nº.- Eplica l gniicado d la guint prón y rprséntalo gráicamnt: 9 Ejrcicio nº.- Escrib
LÍMITES DE FUNCIONES. CONTINUDAD Signiicado dl it Ejrcicio nº.- Rprsnta gráicamnt y plica l gniicado d la prón: Ejrcicio nº.- Eplica l gniicado d la guint prón y rprséntalo gráicamnt: 9 Ejrcicio nº.- Escrib
2 MODELO INTERNO Y MODELO EXTERNO DE UN SISTEMA DE CONTROL
 2 MODELO INTERNO Y MODELO EXTERNO DE UN SISTEMA DE CONTROL 2.1 El modelo interno: ecuaciones de estado en sistemas continuos Entre las formas de modelar un sistema de forma matemática podemos encontrar
2 MODELO INTERNO Y MODELO EXTERNO DE UN SISTEMA DE CONTROL 2.1 El modelo interno: ecuaciones de estado en sistemas continuos Entre las formas de modelar un sistema de forma matemática podemos encontrar
DISCRETOS LINEALES CON RESPUESTAS AL IMPULSO PERIÓDICAS
 DESCRIPCIÓ DE SISTEMAS DISCRETOS LIEALES CO RESPUESTAS AL IMPULSO PERIÓDICAS DESCRIPTIO OF LIEAR DISCRETE SYSTEMS WITH PERIODICAL IMPULSE RESPOSES Rcibido: fbrro d Arbitrado: abril d Marclo Hrrra Martínz*
DESCRIPCIÓ DE SISTEMAS DISCRETOS LIEALES CO RESPUESTAS AL IMPULSO PERIÓDICAS DESCRIPTIO OF LIEAR DISCRETE SYSTEMS WITH PERIODICAL IMPULSE RESPOSES Rcibido: fbrro d Arbitrado: abril d Marclo Hrrra Martínz*
Análisis de Fourier en TC. Teorema de Fourier Serie de Fourier Transformada de Fourier Fórmulas de análisis y síntesis Respuesta en f de sistemas LTI
 Análisis d Fourir n C orma d Fourir Sri d Fourir ransformada d Fourir Fórmulas d análisis y sínsis Rspusa n f d sismas LI Modología Dominio d Frcuncia -Sñals lmnals a parir d las cuals s pud consruir por
Análisis d Fourir n C orma d Fourir Sri d Fourir ransformada d Fourir Fórmulas d análisis y sínsis Rspusa n f d sismas LI Modología Dominio d Frcuncia -Sñals lmnals a parir d las cuals s pud consruir por
LÍMITES, CONTINUIDAD, ASÍNTOTAS 11.1 LÍMITE DE UNA FUNCIÓN LÍMITE DE UNA FUNCIÓN EN UN PUNTO. Límite de una función en un punto
 LÍMITES, CONTINUIDAD, ASÍNTOTAS. LÍMITE DE UNA FUNCIÓN.. LÍMITE DE UNA FUNCIÓN EN UN PUNTO Límit d una función n un punto f ) = l S l: El it cuando tind a c d f) s l c Significa: l s l valor al qu s aproima
LÍMITES, CONTINUIDAD, ASÍNTOTAS. LÍMITE DE UNA FUNCIÓN.. LÍMITE DE UNA FUNCIÓN EN UN PUNTO Límit d una función n un punto f ) = l S l: El it cuando tind a c d f) s l c Significa: l s l valor al qu s aproima
SEÑALES Y SISTEMAS CAPÍTULO UNO. 1.1 Introducción Señales y Clasificación de Señales Señales Periódicas y No Periódicas 6
 CAPÍTULO UNO SEÑALES Y SISTEMAS 1.1 Introducción 1 1.2 Señales y Clasificación de Señales 2 1.3 Señales Periódicas y No Periódicas 6 1.4 Señales de Potencia y de Energía 8 1.5 Transformaciones de la Variable
CAPÍTULO UNO SEÑALES Y SISTEMAS 1.1 Introducción 1 1.2 Señales y Clasificación de Señales 2 1.3 Señales Periódicas y No Periódicas 6 1.4 Señales de Potencia y de Energía 8 1.5 Transformaciones de la Variable
Ing. Mario R. Modesti
 UNIVERSIDAD ECNOLOGICA NACIONAL FACULAD REGIONAL CORDOBA DEPARAMENO ELECRONICA Carrra Asignaura : Ingniría Elcrónica : Análisis d Sñals y Sismas.P.N : Sris y ransformada d Fourir, ransformada invrsa d
UNIVERSIDAD ECNOLOGICA NACIONAL FACULAD REGIONAL CORDOBA DEPARAMENO ELECRONICA Carrra Asignaura : Ingniría Elcrónica : Análisis d Sñals y Sismas.P.N : Sris y ransformada d Fourir, ransformada invrsa d
lm í d x = lm í ln x + x 1 H = lm í x + e x 2
 Autovaluación Página 8 Calcula los siguints límits: a) lm í c m b) lm í ccotg m c) lm í sn d) lm í ( ) / 8 ln 8 8 ln ( cos ) 8 a) lm í 8 c ln ln H ( / ) lm í ( )ln 8 ln m lm í 8 H lm í / 8 b) lm í 8 dcotg
Autovaluación Página 8 Calcula los siguints límits: a) lm í c m b) lm í ccotg m c) lm í sn d) lm í ( ) / 8 ln 8 8 ln ( cos ) 8 a) lm í 8 c ln ln H ( / ) lm í ( )ln 8 ln m lm í 8 H lm í / 8 b) lm í 8 dcotg
Respuesta temporal, Sistemas de orden 1
 Respuesta temporal, Sistemas de orden Transparencias Introducción a la Teoría de Control R. Canetti 203 RESPUESTA TEMPORAL Cómo responde un sistema dinámico lineal, de parámetros concentrados, invariante
Respuesta temporal, Sistemas de orden Transparencias Introducción a la Teoría de Control R. Canetti 203 RESPUESTA TEMPORAL Cómo responde un sistema dinámico lineal, de parámetros concentrados, invariante
RESUMEN DE CARACTERÍSTICAS DE LAS FUNCIONES REALES. CONTINUIDAD
 RESUMEN DE CARACTERÍSTICAS DE LAS FUNCIONES REALES. CONTINUIDAD. ACOTACIÓN DE FUNCIONES COTA SUPERIOR KR s cota suprior d f( ) D s f( ) K Cualquir nº mayor qu una cota suprior también s una cota suprior.
RESUMEN DE CARACTERÍSTICAS DE LAS FUNCIONES REALES. CONTINUIDAD. ACOTACIÓN DE FUNCIONES COTA SUPERIOR KR s cota suprior d f( ) D s f( ) K Cualquir nº mayor qu una cota suprior también s una cota suprior.
UNIVERSIDAD NACIONAL EXPERIMENTAL DEL TACHIRA VICE-RECTORADO ACADEMICO DECANATO DE DOCENCIA
 UNIVERSIDAD NACIONAL EXPERIMENTAL DEL TACHIRA VICE-RECTORADO ACADEMICO DECANATO DE DOCENCIA Departamento: INGENIERIA ELECTRONICA Núcleo: INSTRUMENTACION, CONTROL Y SEÑALES Asignatura: SEÑALES Y SISTEMAS
UNIVERSIDAD NACIONAL EXPERIMENTAL DEL TACHIRA VICE-RECTORADO ACADEMICO DECANATO DE DOCENCIA Departamento: INGENIERIA ELECTRONICA Núcleo: INSTRUMENTACION, CONTROL Y SEÑALES Asignatura: SEÑALES Y SISTEMAS
Vertidos de agua residual al medio natural. Vertidos a masas de agua continentales (I). Sistemas bien mezclados
. Sistemas bien mezclados") eridos de agua residual al medio naural eridos a masas de agua oninenales I. Sisemas bien mezlados 1 Objeivos del ema Enender los sisemas naurales de agua omo depuradoras o reaores biogeoquímios Desarrollar
eridos de agua residual al medio naural eridos a masas de agua oninenales I. Sisemas bien mezlados 1 Objeivos del ema Enender los sisemas naurales de agua omo depuradoras o reaores biogeoquímios Desarrollar
A puede expresarse como producto de matrices elementales
 TLLER GEOMETRÍ VECTORIL Y NLÍTIC FCULTD DE INGENIERÍ-UNIVERSIDD DE NTIOQUI - Profsor: Jim nrés Jrmillo Gonzálz jimj@onptoomputorsom Prt l mtril s tomo oumntos los profsors lrto Jrmillo Grimlo Ols En los
TLLER GEOMETRÍ VECTORIL Y NLÍTIC FCULTD DE INGENIERÍ-UNIVERSIDD DE NTIOQUI - Profsor: Jim nrés Jrmillo Gonzálz jimj@onptoomputorsom Prt l mtril s tomo oumntos los profsors lrto Jrmillo Grimlo Ols En los
Teoría de señales SEÑALES ELECTROFISIOLÓGICAS. Wednesday, September 12, 12
 Teoría de señales SEÑALES ELECTROFISIOLÓGICAS Señales Concepto: Señales Concepto: Las$señales$son$magnitudes$0sicas$o$variables$ detectables$mediante$las$que$se$pueden$transmi7r$ mensajes$o$información.
Teoría de señales SEÑALES ELECTROFISIOLÓGICAS Señales Concepto: Señales Concepto: Las$señales$son$magnitudes$0sicas$o$variables$ detectables$mediante$las$que$se$pueden$transmi7r$ mensajes$o$información.
Práctica# 1 Teorema del muestreo Ph.D. César Martín Moreno II Término
 Práctica# 1 Teorema del muestreo Ph.D. César Martín Moreno II Término 2017-2018 1. Objetivo Demostrar la validez del teorema del muestreo sobre un sistema que incluye un bloque muestreador y un retenedor
Práctica# 1 Teorema del muestreo Ph.D. César Martín Moreno II Término 2017-2018 1. Objetivo Demostrar la validez del teorema del muestreo sobre un sistema que incluye un bloque muestreador y un retenedor
Ondas acústicas en dominios no acotados
 Capítulo 3 Ondas acústicas n dominios no acotados 3.1. Introducción Las ondas acústicas qu s propagan librmnt por un dominio no acotado dbn cumplir la cuación d ondas homogéna para l potncial acústico:
Capítulo 3 Ondas acústicas n dominios no acotados 3.1. Introducción Las ondas acústicas qu s propagan librmnt por un dominio no acotado dbn cumplir la cuación d ondas homogéna para l potncial acústico:
Reporte Nº: 05 Fecha: JULIO 2012. ANÁLISIS DE SITUACIÓN MIGRATORIA DE EXTRANJEROS DE NACIONALIDAD HAITIANA 1. DESCRIPCIÓN DEL REPORTE
 Rport Nº: 05 Fcha: JULIO 2012. ANÁLISIS DE SITUACIÓN MIGRATORIA DE EXTRANJEROS DE NACIONALIDAD HAITIANA 1. DESCRIPCIÓN DEL REPORTE El prsnt inform tin como objtivo spcífico stablcr los movimintos migratorios
Rport Nº: 05 Fcha: JULIO 2012. ANÁLISIS DE SITUACIÓN MIGRATORIA DE EXTRANJEROS DE NACIONALIDAD HAITIANA 1. DESCRIPCIÓN DEL REPORTE El prsnt inform tin como objtivo spcífico stablcr los movimintos migratorios
CAPITULO V. Figura 1.1. Sistema de control Muestreado. Figura 1.2 Diagrama de funcionamiento de un Multiplexer
 5- CAPITULO V SISTEMAS DE CONTROL DIGITAL Figura.. Sistma d control Mustrado Figura.2 Diagrama d funcionaminto d un Multiplxr En la figura.2, s prsnta l diagrama d funcionaminto dl multiplxr, los cuals
5- CAPITULO V SISTEMAS DE CONTROL DIGITAL Figura.. Sistma d control Mustrado Figura.2 Diagrama d funcionaminto d un Multiplxr En la figura.2, s prsnta l diagrama d funcionaminto dl multiplxr, los cuals
Transformada de Laplace - Conceptos Básicos. e -st f(t)dt. L { f (t) } = F(s) =
dt. L { f (t) } = F(s) =") Transformada de Laplace - Conceptos Básicos Definición: Sea f (t) una función de t definida para t > 0. La Transformada de Laplace de f(t) se define como: L { f (t) } = F(s) = 0 e -st f(t)dt Algunas Propiedades
Transformada de Laplace - Conceptos Básicos Definición: Sea f (t) una función de t definida para t > 0. La Transformada de Laplace de f(t) se define como: L { f (t) } = F(s) = 0 e -st f(t)dt Algunas Propiedades
PS Respuesta Temporal de Sistemas La Función de Transferencia
 PS35 - Respuesta Temporal de Sistemas La Función de Transferencia William Colmenares 4 de junio de 006 Índice. Respuesta Temporal. Polos y Ceros.. ejemplos numéricos.......................... 3 3. Señales
PS35 - Respuesta Temporal de Sistemas La Función de Transferencia William Colmenares 4 de junio de 006 Índice. Respuesta Temporal. Polos y Ceros.. ejemplos numéricos.......................... 3 3. Señales
Retardo de transporte
 Retardo de transporte Escalón Escalón con retardo de transporte T Retardo de Transporte. Ejemplo de un Tiristor Tiempo Muerto Ángulo de Disparo (desde controlador) Pulso de disparo Nuevo Pulso de disparo
Retardo de transporte Escalón Escalón con retardo de transporte T Retardo de Transporte. Ejemplo de un Tiristor Tiempo Muerto Ángulo de Disparo (desde controlador) Pulso de disparo Nuevo Pulso de disparo
Ejemplo. Consideremos el sistema de retraso unitario dado por
 Tema 2: Descripción de Sisemas - Pare I - Virginia Mazzone Inroducción Los sisemas que esudiaremos, ienen alguna enrada y alguna salida, 1. Suponemos que si aplicamos una enrada obenemos una salida única.
Tema 2: Descripción de Sisemas - Pare I - Virginia Mazzone Inroducción Los sisemas que esudiaremos, ienen alguna enrada y alguna salida, 1. Suponemos que si aplicamos una enrada obenemos una salida única.
Primer Examen Parcial Tema A Cálculo Vectorial Septiembre 26 de 2017
 Primr Examn Parcial Tma A Cálculo Vctorial Sptimbr 6 d 17 Est s un xamn individual, no s prmit l uso d libros, apunts, calculadoras o cualquir otro mdio lctrónico Rcurd apagar y guardar su tléfono clular
Primr Examn Parcial Tma A Cálculo Vctorial Sptimbr 6 d 17 Est s un xamn individual, no s prmit l uso d libros, apunts, calculadoras o cualquir otro mdio lctrónico Rcurd apagar y guardar su tléfono clular
Análisis de Señales Capítulo III: Transformada de Fourier discreta. Profesor: Néstor Becerra Yoma
 Aálisis d Sñals Capíulo III: Trasormada d Fourir discra Prosor: ésor Bcrra Yoma 3. Torma dl Musro Gra dsarrollo d la compuació > digializació d sñals mdia musro, posrior rcosrucció d la sñal Codició csaria
Aálisis d Sñals Capíulo III: Trasormada d Fourir discra Prosor: ésor Bcrra Yoma 3. Torma dl Musro Gra dsarrollo d la compuació > digializació d sñals mdia musro, posrior rcosrucció d la sñal Codició csaria
Transformada de Laplace Juan Manuel Rodríguez Prieto
 Juan Manuel Rodríguez Prieto L{ f (t)}(s) = e st f (t)dt Ejemplo 1: Calcular la transformada de Laplace de f(t)=1 L{ f (t)}(s) = e st f (t)dt L{ 1}(s) = e st 1dt L{ 1}(s) = lim B B e st dt e st B L{ 1}(s)
Juan Manuel Rodríguez Prieto L{ f (t)}(s) = e st f (t)dt Ejemplo 1: Calcular la transformada de Laplace de f(t)=1 L{ f (t)}(s) = e st f (t)dt L{ 1}(s) = e st 1dt L{ 1}(s) = lim B B e st dt e st B L{ 1}(s)
1. Transformada de Laplace
 1. Transformada de Laplace La transformada de Laplace es un método que transforma una ecuación diferencial en una ecuación algebraica más fácil de resolver. La ecuación diferencial, que describe cómo se
1. Transformada de Laplace La transformada de Laplace es un método que transforma una ecuación diferencial en una ecuación algebraica más fácil de resolver. La ecuación diferencial, que describe cómo se
Sistemas de control: Elementos componentes, variables, función de transferencia y diagrama funcional.
 Sistmas d control: Elmntos componnts, variabls, función d transfrncia y diagrama funcional. Introducción Los sistmas d control automático han jugado un papl vital n l avanc d la cincia y d la ingniría.
Sistmas d control: Elmntos componnts, variabls, función d transfrncia y diagrama funcional. Introducción Los sistmas d control automático han jugado un papl vital n l avanc d la cincia y d la ingniría.
Dinámica relativista - Efecto Compton
 Dinámia rlativista - Efto Compton Niolás Di Fiori Fdrio Foiri Matías Rodríguz niolasdf@fibrtl.om.ar, fdfoiri@hotmail.om, srv@labs.df.uba.ar Laboratorio 5 FCEyN UBA, Otubr d S analizó l fto Compton produido
Dinámia rlativista - Efto Compton Niolás Di Fiori Fdrio Foiri Matías Rodríguz niolasdf@fibrtl.om.ar, fdfoiri@hotmail.om, srv@labs.df.uba.ar Laboratorio 5 FCEyN UBA, Otubr d S analizó l fto Compton produido
Teoría de Sistemas y Señales. Problemas Propuestos - Serie 1 - Parte I
 Descripción: Sisemas y Señales Teoría de Sisemas y Señales Problemas Propuesos - Serie - Pare I. Indique cuál de las siguienes señales en iempo coninuo son periódicas. Deermine el período fundamenal. Jusifique
Descripción: Sisemas y Señales Teoría de Sisemas y Señales Problemas Propuesos - Serie - Pare I. Indique cuál de las siguienes señales en iempo coninuo son periódicas. Deermine el período fundamenal. Jusifique
Transformada de Laplace (material de apoyo)
") Transformada de Laplace (material de apoyo) André Luiz Fonseca de Oliveira Michel Hakas Resumen En este artículo se revisará los conceptos básicos para la utilización de la transformada de Laplace en la
Transformada de Laplace (material de apoyo) André Luiz Fonseca de Oliveira Michel Hakas Resumen En este artículo se revisará los conceptos básicos para la utilización de la transformada de Laplace en la
III. FUNCIONES EXPONENCIALES Y LOGARÍTMICAS
 III. FUNCIONES EXPONENCIALES Y LOGARÍTMICAS.. FUNCIÓN EXPONENCIAL n Hmos stado manjando n st trabajo prsions dl tipo n dond s una variabl llamada bas n una constant llamada ponnt, si intrcambiamos d lugar
III. FUNCIONES EXPONENCIALES Y LOGARÍTMICAS.. FUNCIÓN EXPONENCIAL n Hmos stado manjando n st trabajo prsions dl tipo n dond s una variabl llamada bas n una constant llamada ponnt, si intrcambiamos d lugar
Ecuación para cirquitones en líneas de transmisión con carga eléctrica discreta. K. J. Candía
 Ecuación para cirquitons n ínas d transmisión con carga éctrica discrta. K. J. Candía Dpartamnto d Ectrónica, Univrsidad d Tarapacá, Arica, Chi Emai: kchandia@uta.c Rsumn En sta Chara s mustra un mcanismo
Ecuación para cirquitons n ínas d transmisión con carga éctrica discrta. K. J. Candía Dpartamnto d Ectrónica, Univrsidad d Tarapacá, Arica, Chi Emai: kchandia@uta.c Rsumn En sta Chara s mustra un mcanismo
Tema 5. La Transformada Z. Indice:
 Indice: La Transformada Z Convergencia de la Transformada Z Propiedades de La Transformada Z La Transformada Z inversa Método de la División Directa Método de Descomposición en Fracciones Parciales. Prof.
Indice: La Transformada Z Convergencia de la Transformada Z Propiedades de La Transformada Z La Transformada Z inversa Método de la División Directa Método de Descomposición en Fracciones Parciales. Prof.
La Transformada de Laplace La Transformada Unilateral de Laplace
 Indice: La Transformada de Laplace La Transformada Bilateral de Laplace La Transformada Unilateral de Laplace Región de Convergencia (ROC) Cálculo de La Transformada de Laplace Propiedades de La Transformada
Indice: La Transformada de Laplace La Transformada Bilateral de Laplace La Transformada Unilateral de Laplace Región de Convergencia (ROC) Cálculo de La Transformada de Laplace Propiedades de La Transformada
Problemas del tema 3. Sistemas lineales e invariantes en el tiempo
 Ingeniería Informática Medios de ransmisión (M) Problemas del tema Sistemas lineales e invariantes en el tiempo Curso 8-9 7//8 Enunciados. Considere el sistema de la figura Retardo de segundo ( ) x(t)
Ingeniería Informática Medios de ransmisión (M) Problemas del tema Sistemas lineales e invariantes en el tiempo Curso 8-9 7//8 Enunciados. Considere el sistema de la figura Retardo de segundo ( ) x(t)
Señales y Sistemas. Análisis de Fourier.
 Sñals y Sistmas Aálisis d Fourir. Itroducció El foqu d st capítulo s la rprstació d sñals utilizado sos y cosos ( otras palabras, xpocials complas). El studio d sñals y sistmas utilizado xpocials complas
Sñals y Sistmas Aálisis d Fourir. Itroducció El foqu d st capítulo s la rprstació d sñals utilizado sos y cosos ( otras palabras, xpocials complas). El studio d sñals y sistmas utilizado xpocials complas
TEMA 10: DERIVADAS. f = = x
 TEMA 0:. DERIVADA DE UNA FUNCIÓN EN UN PUNTO La siguint gráfica rprsnta la tmpratura n l intrior d la Tirra n función d la profundidad. Vmos qu la gráfica s simpr crcint, s dcir, a mdida qu aumnta la profundidad
TEMA 0:. DERIVADA DE UNA FUNCIÓN EN UN PUNTO La siguint gráfica rprsnta la tmpratura n l intrior d la Tirra n función d la profundidad. Vmos qu la gráfica s simpr crcint, s dcir, a mdida qu aumnta la profundidad
FUNCIONES DE DOS VARIABLES DOMINIOS, DERIVADAS PARCIALES Y DIRECCIONALES. Preguntas de dominios y curvas de nivel
 FUNCIONES DE DOS VARIABLES DOMINIOS, DERIVADAS PARCIALES Y DIRECCIONALES Prguntas d dominios curvas d nivl Dtrmina l dominio d las uncions: a) (, ) b) (, sin + + En cada caso indica dos puntos qu no san
FUNCIONES DE DOS VARIABLES DOMINIOS, DERIVADAS PARCIALES Y DIRECCIONALES Prguntas d dominios curvas d nivl Dtrmina l dominio d las uncions: a) (, ) b) (, sin + + En cada caso indica dos puntos qu no san
SISTEMAS LINEALES. Tema 3. Análisis y caracterización de sistemas continuos empleando la transformada de Laplace
 SISTEMAS LINEALES Tema 3. Análisis y caracterización de sistemas continuos empleando la transformada de Laplace 2 de octubre de 200 F. JAVIER ACEVEDO javier.acevedo@uah.es TEMA 3 Contenidos. Autofunciones
SISTEMAS LINEALES Tema 3. Análisis y caracterización de sistemas continuos empleando la transformada de Laplace 2 de octubre de 200 F. JAVIER ACEVEDO javier.acevedo@uah.es TEMA 3 Contenidos. Autofunciones
Formato para Prácticas de Laboratorio
 PROGRAMA EDUCATIVO PLAN DE ESTUDIO CLAVE DE UNIDAD DE APRENDIZAJE NOMBRE DE LA UNIDAD DE APRENDIZAJE Ing. en Electrónica 2009-2 11682 Señales y Sistemas PRÁCTICA No. 4 LABORATORIO DE NOMBRE DE LA PRÁCTICA
PROGRAMA EDUCATIVO PLAN DE ESTUDIO CLAVE DE UNIDAD DE APRENDIZAJE NOMBRE DE LA UNIDAD DE APRENDIZAJE Ing. en Electrónica 2009-2 11682 Señales y Sistemas PRÁCTICA No. 4 LABORATORIO DE NOMBRE DE LA PRÁCTICA
OPCIÓN A. a) Estudiar si A y B tienen inversa y calcularla cuando sea posible (1 punto)
 Estudiar si A y B tienen inversa y calcularla cuando sea posible (1 punto)") San Blas, 4, ntrplanta. 983 30 70 54 OPCIÓN A 4 E.- San A = 3 y B = a) Estudiar si A y B tinn invrsa y calcularla cuando sa posibl ( punto) 0 b) Dtrminar X tal qu AX = B I sindo I = 0 (.5 puntos) a) Una
San Blas, 4, ntrplanta. 983 30 70 54 OPCIÓN A 4 E.- San A = 3 y B = a) Estudiar si A y B tinn invrsa y calcularla cuando sa posibl ( punto) 0 b) Dtrminar X tal qu AX = B I sindo I = 0 (.5 puntos) a) Una
INDICE Capitulo 1. Introducción Capitulo 2. Descripción matemática de señales 2.1. Introducción y objetivos
 INDICE Prefacio XIII Capitulo 1. Introducción 1 1.1. Definición de señales y sistemas 1 1.2. Tipos de señales 1 1.3. Ejemplo de una señal y un sistema 8 1.4. Uso de MATLAB 13 Capitulo 2. Descripción matemática
INDICE Prefacio XIII Capitulo 1. Introducción 1 1.1. Definición de señales y sistemas 1 1.2. Tipos de señales 1 1.3. Ejemplo de una señal y un sistema 8 1.4. Uso de MATLAB 13 Capitulo 2. Descripción matemática