INTRODUCCIÓN A LOS PROBLEMAS NO LINEALES
|
|
|
- Javier Santos Lagos
- hace 8 años
- Vistas:
Transcripción
1 INTRODUCCIÓN A LOS PROBLEMAS NO LINEALES RASGOS DISTINTIVOS DE LOS PNL. Forma de un problema de optimización no lineal. Concepto de óptimos locales y globales. Estrategia de los algoritmos de descenso. PROBLEMAS SIN RESTRICCIONES: Ejemplos. Problema de lote óptimo de pedido en un inventario. Ajuste no lineal. PROBLEMAS CON RESTRICCIONES: Ejemplos. Localización de torres de transmisión. Problema de equilibrio de mercados. MIOPD.FIB I.O.E. dística UPC

2 PPROGRAMACIÓN NO LINEAL SIN RESTRICCIONES CONCEPTOS BÁSICOS. Definición de mínimo local y global Representación a lo largo de una dirección de f. Concepto de dirección de descenso. f. Dif. CONDICIONES DE OPTIMALIDAD Necesarias de 1er orden. Funciones convexas dif. Propiedades básicas. Funciones cuadráticas y funciones 2-dif. Necesarias y suficientes de 2º orden MÉTODO DEL GRADIENTE Y EXPLORACIÓN LINEAL. I.O.E. ca MIOPD. FIB UPC

3 x 3 B A x 1 VÉRTICE A x 2 MIOPD. I.O.E. FIB de Estadística UPC

4 C x 3 B VÉRTICE B x 1 x 2 VÉRTICE C ÓPTIMOS ALTERNATIVOS MIOPD. FIB I.O.E. Diplomatura de UPC

5 x 3 C F Recorriendo las diferentes bases encontraríamos los puntos C, D, E, F. En todos ellos la f.obj. tiene igual valor: z* = 220/15. G E D x 1 Cualquier punto G sobre la cara tendrá igual valor para la f.obj. ( COMPROBADLO) x 2 MIOPD. I.O.E. FIB Diplomatura de UPC

6 EFICACIA DEL ALGORITMO SÍMPLEX En el ejemplo anterior se examinan sólo 3 de los 9 vértices del poliedro. Hay ejemplos en los que el algoritmo debe examinarlos TODOS (Klee-Minty, 1972). PEOR CASO POSIBLE. x 3 x 1 x 2 MIOPD. FIB I.O.E. Diplomatura de UPC
. PEOR CASO POSIBLE. x 3 x 1 x 2 MIOPD.")
7 Introducción a los Problemas No Lineales (P.N.L.) Un P.N.L. es un problema de programación matemática donde la F.O. o alguna restricción és no lineal. Las propiedades y características de estos problemas son distintas a los de P.L. En consecuencia: Los algoritmos de optimización que se utilizan para resolver PNL's son muy diferentes a los utilizados en los P.L. La utilización de "RESOLVEDORES" (Solvers) en lenguajes de modelización como AMPL esconde las diferencias entre P.L. y P.N.L.'s. MIOPD. IE. Diplomatura FIB de UPC

8 Forma General de un P.N.L Max (Min): f 0 (x 1, x 2,, x n ) s. a: f 1 (x 1, x 2,, x n ) 0 : i f k (x 1, x 2,, x n ) 0 ( i, j) cte. : f m (x 1, x 2,, x n )=0 f j (x 1, x 2,, x n ) diferenciable j x i continua i f x j MIOPD. FIB I.O.E. Diplomatura UPC
=0 f j (x 1, x 2,, x n ) diferenciable")
9 PROBLEMA DE OPTIMIZACI ON NO LINEAL SIN RESTRICIONES 43 Min x IR n f(x) f :IR n IR,fdiferenciable f(x) = f x 1. f x n (x)
 = f x 1.")
10
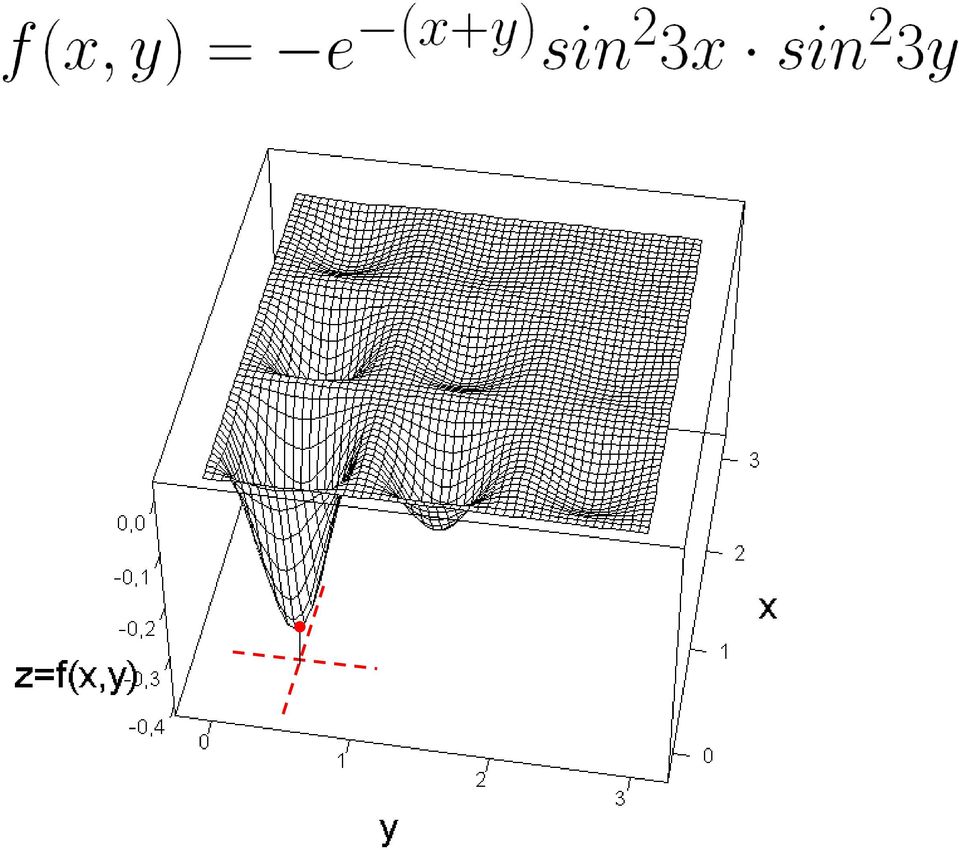
11 Curvas de nivel de

12 44 Definici on de m ınimo local x de f. δ 0 t.q. x, x x 2 δ, δ<δ 0 : CAPÍTULO 1. MODELOS DE TIEMPO DE VIDA f(x) f(x ) Definici on de m ınimo local estricto x de f. δ 0 t.q. x x, x x 2 δ, 0 <δ<δ 0 : f(x) >f(x ) Definici on de m ınimo global x de f. x IR n,f(x) f(x ) Definici on de m ınimo global estricto x de f. x IR n,x x,f(x) >f(x )
 f(x ) Definici on de m ınimo global estricto x de f.")
13 Ejemplo: P.N.L. sin restricciones

14 Min y t

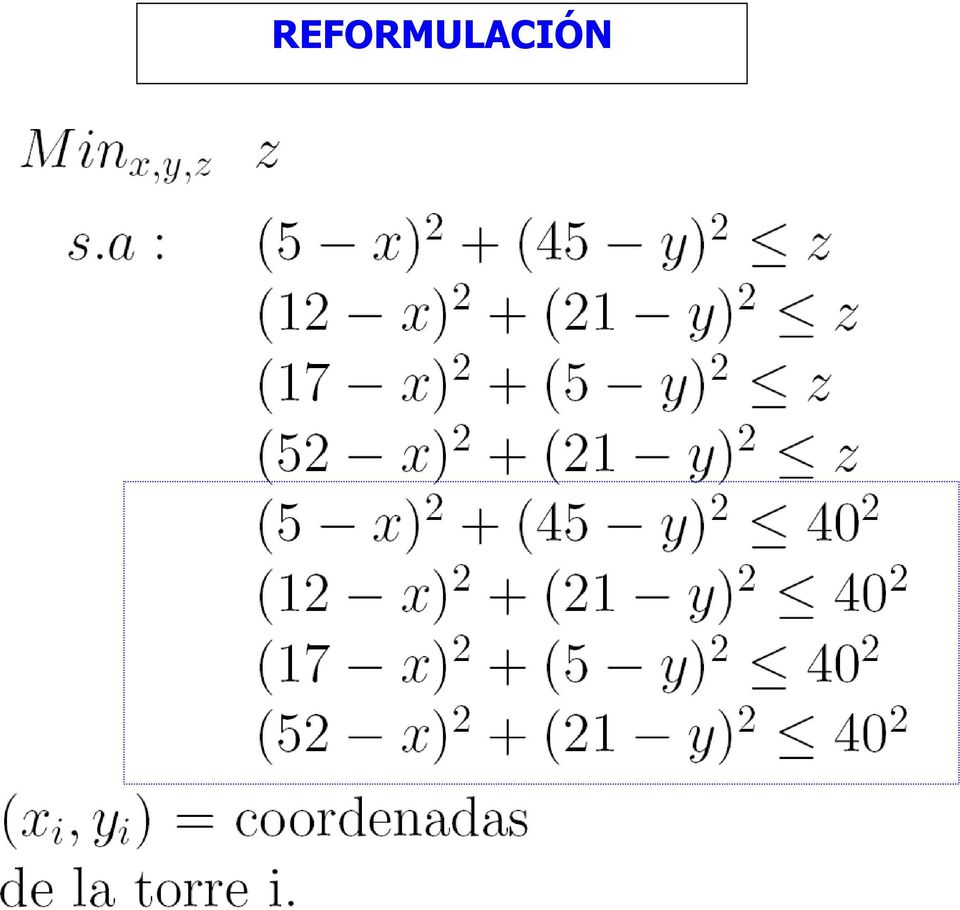
15 Ejemplo de P.N.L. con restricciones no lineales Una empresa de telefonía móvil suministra servicio a varias ciudades. Quiere mejorar su servicio instalando una nueva torre. La nueva torre tendrá un radio de transmisión de 40 km y aprovechará las torres existentes en las cuatro ciudades. MIOPD. FIB plomatura de Estadística UPC

16 50 40 C 1 x=5, y=45 30 Nueva Torre x=?, y=? 20 C 2 x=12, y=21 C 3 x=52, y= C 4 x=17, y= I.O.E. I.O.D. Diplomatura de Estadística UPC

17 1-x 1 0,5 f(x) 0,5 1 1,5 2 x-1 x/2 NO DIFERENCIABLE!! x

18 REFORMULACIÓN
19 (3.d) PROGRAMACIÓN NO LINEAL SIN RESTRICCIONES CONCEPTOS BÁSICOS. Definición de mínimo local y global Representación a lo largo de una dirección de f. Concepto de dirección de descenso. f. Dif. CONDICIONES DE OPTIMALIDAD Necesarias de 1er orden. Funciones convexas dif. Propiedades básicas. Funciones cuadráticas y funciones 2-dif. Necesarias y suficientes de 2º orden MÉTODO DEL GRADIENTE Y EXPLORACIÓN LINEAL. I.O.E. MIOPD. stadística FIB UPC

20

21 PROBLEMA DE OPTIMIZACI ON NO LINEAL SIN RESTRICIONES 43 Min x IR n f(x) f :IR n IR,fdiferenciable f(x) = f x 1. f x n (x)
22
23 Curvas de nivel de
24 44 Definici on de m ınimo local x de f. δ 0 t.q. x, x x 2 δ, δ<δ 0 : CAPÍTULO 1. MODELOS DE TIEMPO DE VIDA f(x) f(x ) Definici on de m ınimo local estricto x de f. δ 0 t.q. x x, x x 2 δ, 0 <δ<δ 0 : f(x) >f(x ) Definici on de m ınimo global x de f. x IR n,f(x) f(x ) Definici on de m ınimo global estricto x de f. x IR n,x x,f(x) >f(x )
25 h(α) z=f(x 1,x 2 ) x d x 2 α x 1
26 46 h(α) =f(x + αd) es derivable y h(α) =h(0) + h o(α) (0)α + o(α) con lim α 0+ α Por la regla de la cadena: h (0) = d f(x): f(x + αd) =f(x)+α d f(x)+o(α) Direcci on d de descenso (d.d.) para f en x α 0 > 0, t.q. 0 <α<α 0,esf(x + αd) <f(x). Si f es diferenciable en x: (a) d es d.d. en x d f(x) 0. (b) d es d.d. en x d f(x) < 0. CAPÍTULO 1. MODELOS DE TIEMPO DE VIDA =0 Si f(x) 0entonces d = f(x) es d.d. en x para f: d f(x) = f(x) f(x) = f(x) 2 < 0
27
28 estrict. convexa f(x,y)=5x 2 +10y convexa x 1 x 2
29 0 α
30
31
32
33
34
35 COMPORTAMIENTO DEL MÉTODO DEL GRADIENTE (Exploración Lineal exacta) f () T T x = x Qx b x x 0 x 2 x * x 1 E E ( x ) k+ 1 ( x ) k ( A a) ( A a) ( ) ( *) T ( * x x x x x ) k = k Q k, E
36
37 h(α) ( h'(0) < 0 ) h(α) α 1ª Regla 2ª Regla α
38
39 0 τ 2 1-τ 1
40 Determinar intervalo de incertidumbre 0 0 τ 1 1-τ
41 Ejemplo: P.N.L. sin restricciones
42 Exeini # Carga los vectores t, y n=5 x0ini # Carga la solución inicial en x0 [x,options,f,j]=leastsq('fexe',x0,options,'gexe',t,y,n) t1=0:0.1:8.0 y1=x(1)*exp(x(2)*t1) plot(t,n1,'x',t1,y1) 'fexe.m' function f = FUN(x,t,y,n) for i=1:n f(i) = 0.5*(x(1)*exp(x(2)*t(i)) - y(i) ); end 'gexe.m' function gf = GRADFUN(x, t, y,n) for i = 1:n gf(1,i) = 0.5*exp(x(2)*t(i)); gf(2,i) = 0.5*t(i)*x(1)*exp(x(2)*t(i)); end
43 Min y t
44 OBJETIVO: Estudiar las condiciones que verifican los óptimos locales de (P) Notación: MIOPD. FIB UPC
45 CONDICIONES SUFICIENTES DE K-K-T MIOPD. FIB UPC
46 MODELO DE EQUILIBRIO DE MERCADOS d 1 d 2 d 3 0 s i 1 2 tij Transporte 1 2 d 1 d 2 Demanda Oferta 3 d 3
47 ( Pero puede existir z j > 0!! )
48 PROGRAMACIÓN NO LINEAL CON RESTRICCIONES CONDICIONES DE KARUSH-KUHN-TUCKER. Concepto de cono normal del conjunto factible. Condiciones necesarias de 1er orden y regularidad. Caso de problema convexo. Condiciones suficientes. Lagrangiano del problema. Ejemplos. Método de conjuntos activos. Ejemplos. MÉTODO DEL GRADIENTE REDUCIDO. Caso de restricciones lineales. Variables básicas y no básicas. Algoritmo del gradiente reducido. MIOPD. FIB I.O.E. de Estadística UPC
49
50
51 OBJETIVO: Estudiar las condiciones que verifican los óptimos locales de (P) Notación: MIOPD. I.O.E. FIB Diplomatura de UPC
52
53
54 Índices de las restricciones activas: MIOPD. FIB I.O.E. de Estadística UPC
55 CONDICIONES NECESARIAS DE K-K-T Regularidad en x* : de pleno rango MIOPD. FIB I.O.E. Diplomatura de UPC
56 y x x *
57 CONDICIONES SUFICIENTES DE K-K-T MIOPD. I.O.E. FIB de Estadística UPC
58 62 CAPÍTULO 1. MODELOS DE TIEMPO DE VIDA CONDICIONES DE 1 er ORDEN EN FUNCI ON DEL LAGRANGIANO Para el problema: Min f(x) s.a : h(x) =0v g(x) 0 u Se define el Lagrangiano L(x, v, u) =f(x) v h(x) u g(x) De forma que las condiciones de 1 er orden se expresan:. x L(x, v, u) = f(x) v L(x, v, u) =h(x) =0 u L(x, v, u) =g(x) 0 u g(x) =0, u 0 g x u h x v =0
59 MIOPD. FIB Diplomatura de Estadística UPC
60 En el óptimo se verifica: También en cualquier otro punto; p.ej: (!!!)
61 MODELO DE EQUILIBRIO DE MERCADOS d 1 d 2 d 3 0 s i 1 2 tij Transporte 1 2 d 1 d 2 Demanda Oferta 3 d 3
62
63
64 ( Pero puede existir z j > 0!! )
65
66 I.O.E. I.O.D. Diplomatura de Estadística UPC
67
68
69
70
71 PRESENTACIÓN Y ANÁLISIS DE MODELOS EN P.N.L. Semana 13. Sesión de teoría. Problemas de transporte. Problemas con demanda estocástica. Equilibrio de mercados. Análisis mediante las condiciones de KKT (Práctica 6) MIOPD. FIB I.O.E. Diplomatura de UPC
72 y x x *
73 CONDICIONES SUFICIENTES DE K-K-T MIOPD. FIB I.O.E. de Estadística UPC
74 MODELO DE EQUILIBRIO DE MERCADOS d 1 d 2 d 3 0 s i 1 2 tij Transporte 1 2 d 1 d 2 Demanda Oferta 3 d 3
75 MODELO DE EQUILIBRIO DE MERCADOS d j t1j j d j t2j MIOPD. FIB I.O.E. Diplomatura de UPC
76 MIOPD. I.O.E. FIB de Estadística UPC
77
78 PRÁCTICA 6 d = Cota superior de la demanda p(d) = p( d - δ ) = q(δ ) p(d) q(δ ) d δ d 1 d 2 d 3 s i 0 δ 1 δ 2 1 d Precio = p(demanda) tij 1 2 d 1 d 2 d d = d +δ Demanda absorbida por el mercado Exceso de demanda 2 δ 3 3 d 3 MIOPD. FIB I.O.E. Diplomatura de UPC
79 d 1 d 2 d 3 0 s i δ 1 δ 2 1 tij 1 2 d 1 d 2 2 δ 3 3 d 3
80 set FACT; set MERC; set ARCTR within (FACT cross MERC); set ORIGEN; set ARC_FACT within (ORIGEN cross FACT); set ARC_EXC within (ORIGEN cross MERC); param CTRANS {(i,j) in ARCTR} >=0; param a {j in MERC}>=0; s param b {j in MERC}; i param dmax {j in MERC}>0; d 1 param alfa {i in FACT}>0; 0 param beta {i in FACT}; d 2 d 3 let dtotal:= sum {j in MERC} dmax[j]; node OR {l in ORIGEN} net_out = dtotal; node P {i in FACT}; node MR {j in MERC} net_in = dmax[j]; arc fict {(l,j) in ARC_EXC} >= 0, from OR[l], to MR[j]; arc xij {(i,j) in ARCTR} >= 0, from P[i], to MR[j]; arc si {(i,j) in ARC_FACT} >=0, from OR[i], to P[j]; δ 1 δ δ 3 tij d 1 d 2 d 3
81 minimize F: sum{(i,j) in ARC_FACT} alfa[j]*si[j]+0,5*beta[j]*si[j]^2 + sum{(p,q) in ARCTR} CTRANS[p,q]*xij[p,q]+ sum{(r,s) in ARC_EXC} a[s]*fict[s] + 0,5*b[s]*fict[s]^2; d 1 0 s i δ 1 δ 2 1 tij 1 2 d 1 d 2 d 2 d 3 2 π(s )=α+βs δ 3 3 d 3 q(δ )=a+bδ s δ
82 set FACT:= P1 P2; set MERC:= M1 M2 M3; set ARCTR:= (P1,M1) (P1,M2) (P1,M3) (P2,M1) (P2,M2) (P2,M3); set ORIGEN:= O; set ARC_FACT:= (O,P1) (O,P2); set ARC_EXC:= (O,M1) (O,M2) (O,M3); param CTRANS:= P1 M1 1 P1 M2 2 P1 M3 1.5 P2 M1 3 P2 M2 2 P2 M3 2.5; param a:= M1 10 M2 12 M3 9; param b:= M1 3 M2 2 M3 4; param dmax:= M1 200 M2 200 M3 200; δ 1 param alfa:= P1 600 P2 600; tij 1 param beta:= P1-0.5 P2-0.5; s i 1 d 1 d 2 d 3 0 δ 2 2 d 1 d 2 2 δ 3 3 d 3
83 Precio en M1 Precio en M2; no se vende Precio en M3 d 1 d 2 d 3 0 s i δ 1 δ ,91 tij 1 2 d 1 d ,55 δ 3 3 d 3
Optimización, Solemne 2. Semestre Otoño 2012 Profesores: Paul Bosch, Rodrigo López, Fernando Paredes, Pablo Rey Tiempo: 110 min.
 UNIVERSIDAD DIEGO PORTALES. FACULTAD DE INGENIERIA. ESCUELA DE INGENIERIA INDUSTRIAL. Optimización, Solemne. Semestre Otoño Profesores: Paul Bosch, Rodrigo López, Fernando Paredes, Pablo Rey Tiempo: min.
UNIVERSIDAD DIEGO PORTALES. FACULTAD DE INGENIERIA. ESCUELA DE INGENIERIA INDUSTRIAL. Optimización, Solemne. Semestre Otoño Profesores: Paul Bosch, Rodrigo López, Fernando Paredes, Pablo Rey Tiempo: min.
Unidad III: Programación no lineal
 Unidad III: Programación no lineal 3.1 Conceptos básicos de problemas de programación no lineal Programación no lineal (PNL) es el proceso de resolución de un sistema de igualdades y desigualdades sujetas
Unidad III: Programación no lineal 3.1 Conceptos básicos de problemas de programación no lineal Programación no lineal (PNL) es el proceso de resolución de un sistema de igualdades y desigualdades sujetas
UNIDAD 6. Programación no lineal
 UNIDAD 6 Programación no lineal En matemática Programación no lineal (PNL) es el proceso de resolución de un sistema de igualdades y desigualdades sujetas a un conjunto de restricciones sobre un conjunto
UNIDAD 6 Programación no lineal En matemática Programación no lineal (PNL) es el proceso de resolución de un sistema de igualdades y desigualdades sujetas a un conjunto de restricciones sobre un conjunto
3. MODELO MACROECONOMICO. 3.1 Oferta y demanda agregada nacional y su efecto en la economía internacional
 3. MODELO MACROECONOMICO 3.1 Oferta y demanda agregada nacional y su efecto en la economía internacional Definimos primero a la oferta y demanda agregada para después desglosar sus elementos. Veremos la
3. MODELO MACROECONOMICO 3.1 Oferta y demanda agregada nacional y su efecto en la economía internacional Definimos primero a la oferta y demanda agregada para después desglosar sus elementos. Veremos la
GEOMETRÍA. Septiembre 94. Determinar la ecuación del plano que pasa por el punto M (1,0, la recta x 1 y z
 GEOMETRÍA Junio 94. 1. Sin resolver el sistema, determina si la recta x 3y + 1 = 0 es exterior, secante ó tangente a la circunferencia (x 1) (y ) 1. Razónalo. [1,5 puntos]. Dadas las ecuaciones de los
GEOMETRÍA Junio 94. 1. Sin resolver el sistema, determina si la recta x 3y + 1 = 0 es exterior, secante ó tangente a la circunferencia (x 1) (y ) 1. Razónalo. [1,5 puntos]. Dadas las ecuaciones de los
UNIVERSIDAD CARLOS III DE MADRID MATEMÁTICAS PARA LA ECONOMÍA II PROBLEMAS (SOLUCIONES )
") UNIVERSIDAD CARLOS III DE MADRID MATEMÁTICAS PARA LA ECONOMÍA II PROBLEMAS SOLUCIONES HOJA 5: Optimización 5-1. Hallar los puntos críticos de las siguiente funciones y clasificarlos: a fx, y = x y + xy.
UNIVERSIDAD CARLOS III DE MADRID MATEMÁTICAS PARA LA ECONOMÍA II PROBLEMAS SOLUCIONES HOJA 5: Optimización 5-1. Hallar los puntos críticos de las siguiente funciones y clasificarlos: a fx, y = x y + xy.
Guía 2 Del estudiante Modalidad a distancia. Modulo CÁLCULO UNIVARIADO ADMINISTRACIÓN TURÍSTICA Y HOTELERA II SEMESTRE
 Guía 2 Del estudiante Modalidad a distancia Modulo CÁLCULO UNIVARIADO ADMINISTRACIÓN TURÍSTICA Y HOTELERA II SEMESTRE DATOS DE IDENTIFICACION TUTOR Luis Enrique Alvarado Vargas Teléfono 435 29 52 CEL.
Guía 2 Del estudiante Modalidad a distancia Modulo CÁLCULO UNIVARIADO ADMINISTRACIÓN TURÍSTICA Y HOTELERA II SEMESTRE DATOS DE IDENTIFICACION TUTOR Luis Enrique Alvarado Vargas Teléfono 435 29 52 CEL.
OPTIMIZACIÓN Y SIMULACIÓN PARA LA EMPRESA. Tema 2 Programación Lineal
 OPTIMIZACIÓN Y SIMULACIÓN PARA LA EMPRESA Tema 2 Programación Lineal ORGANIZACIÓN DEL TEMA Sesiones: Introducción, definición y ejemplos Propiedades y procedimientos de solución Interpretación económica
OPTIMIZACIÓN Y SIMULACIÓN PARA LA EMPRESA Tema 2 Programación Lineal ORGANIZACIÓN DEL TEMA Sesiones: Introducción, definición y ejemplos Propiedades y procedimientos de solución Interpretación económica
Fundamentos de Investigación de Operaciones Investigación de Operaciones 1
 Fundamentos de Investigación de Operaciones Investigación de Operaciones 1 1 de agosto de 2003 1. Introducción Cualquier modelo de una situación es una simplificación de la situación real. Por lo tanto,
Fundamentos de Investigación de Operaciones Investigación de Operaciones 1 1 de agosto de 2003 1. Introducción Cualquier modelo de una situación es una simplificación de la situación real. Por lo tanto,
Introducción a la optimización con algoritmos. Ejercicios. 0 2 f(x + t(y x))(y x)dt. J(x + t(y x))(y x)dt siendo J la matriz Jacobiana de F.
)(y x)dt. J(x + t(y x))(y x)dt siendo J la matriz Jacobiana de F.") Introducción a la optimización con algoritmos Ejercicios Preliminares 1. Demostrar que si f C 2 (IR n ), f : IR n IR entonces f(y) f(x) = 1 0 2 f(x + t(y x))(y x)dt. 2. Demostrar que si F C 1 (IR n ),
Introducción a la optimización con algoritmos Ejercicios Preliminares 1. Demostrar que si f C 2 (IR n ), f : IR n IR entonces f(y) f(x) = 1 0 2 f(x + t(y x))(y x)dt. 2. Demostrar que si F C 1 (IR n ),
Diferenciabilidad, Regla de la Cadena y Aplicaciones
 Universidad Técnica Federico Santa María Departamento de Matemática Matemática III Guía Nº3 Primer Semestre 015 Diferenciabilidad, Regla de la Cadena y Aplicaciones Problemas Propuestos 1. Sea f : R R
Universidad Técnica Federico Santa María Departamento de Matemática Matemática III Guía Nº3 Primer Semestre 015 Diferenciabilidad, Regla de la Cadena y Aplicaciones Problemas Propuestos 1. Sea f : R R
Introducción a la Optimización Matemática
 Introducción a la Optimización Matemática Modelos de Optimización Tienen como propósito seleccionar la mejor decisión de un número de posibles alternativas, sin tener que enumerar completamente todas ellas.
Introducción a la Optimización Matemática Modelos de Optimización Tienen como propósito seleccionar la mejor decisión de un número de posibles alternativas, sin tener que enumerar completamente todas ellas.
(2.b) PROPIEDADES DE LOS MODELOS LINEALES
 PROPIEDADES DE LOS MODELOS LINEALES") (2.b) PROPIEDADES DE LOS MODELOS LINEALES ESTUDIO GRÁFICO DE UN P.P.L. EN R 2. Caracterización de la región factible. Resolución gráfica del problema. Óptimos alternativos. Problemas no factibles y no
(2.b) PROPIEDADES DE LOS MODELOS LINEALES ESTUDIO GRÁFICO DE UN P.P.L. EN R 2. Caracterización de la región factible. Resolución gráfica del problema. Óptimos alternativos. Problemas no factibles y no
SISTEMAS INTELIGENTES
 SISTEMAS INTELIGENTES T11: Métodos Kernel: Máquinas de vectores soporte {jdiez, juanjo} @ aic.uniovi.es Índice Funciones y métodos kernel Concepto: representación de datos Características y ventajas Funciones
SISTEMAS INTELIGENTES T11: Métodos Kernel: Máquinas de vectores soporte {jdiez, juanjo} @ aic.uniovi.es Índice Funciones y métodos kernel Concepto: representación de datos Características y ventajas Funciones
Juegos Cooperativos. Core
 Curso : Juegos Cooperativos Core J. Oviedo Universidad Nacional de San Luis 1. Juegos Cooperativos En estos juegos se permite la comunicación entre los jugadores, también pueden firmar contratos de cooperación.
Curso : Juegos Cooperativos Core J. Oviedo Universidad Nacional de San Luis 1. Juegos Cooperativos En estos juegos se permite la comunicación entre los jugadores, también pueden firmar contratos de cooperación.
MATEMÁTICAS para estudiantes de primer curso de facultades y escuelas técnicas
 Universidad de Cádiz Departamento de Matemáticas MATEMÁTICAS para estudiantes de primer curso de facultades y escuelas técnicas Tema 7 Funciones reales de una variable real Elaborado por la Profesora Doctora
Universidad de Cádiz Departamento de Matemáticas MATEMÁTICAS para estudiantes de primer curso de facultades y escuelas técnicas Tema 7 Funciones reales de una variable real Elaborado por la Profesora Doctora
Extremos de varias variables
 Capítulo 1 Extremos de varias variables Problema 1 Encontrar los extremos absolutos de la función fx, y) = xy en el conjunto A = x, y) IR : x + y 4, x 5/}. Solución: En primer lugar representamos el conjunto
Capítulo 1 Extremos de varias variables Problema 1 Encontrar los extremos absolutos de la función fx, y) = xy en el conjunto A = x, y) IR : x + y 4, x 5/}. Solución: En primer lugar representamos el conjunto
Ejercicios Propuestos Tema 2
 Ejercicios Propuestos Tema 2 1 Programar la función: fx, A, X = a 0 + a 1 x x 1 + a 2 x x 1 x x 2 + + a n x x 1 x x 2 x x n, donde A = [a 0, a 1,, a n ], X = [x 1, x 2,, x n ], con x R Calcular todas las
Ejercicios Propuestos Tema 2 1 Programar la función: fx, A, X = a 0 + a 1 x x 1 + a 2 x x 1 x x 2 + + a n x x 1 x x 2 x x n, donde A = [a 0, a 1,, a n ], X = [x 1, x 2,, x n ], con x R Calcular todas las
Observaciones del profesor:
 Calificación total máxima: 10 puntos. Tiempo: 60 minutos. OPCIÓN A Ejercicio 1. (Puntuación máxima: 4 puntos) Se considera la matriz: A=( ) a) Determina la matriz B= A 2-2A 1,5 PUNTOS b) Determina los
Calificación total máxima: 10 puntos. Tiempo: 60 minutos. OPCIÓN A Ejercicio 1. (Puntuación máxima: 4 puntos) Se considera la matriz: A=( ) a) Determina la matriz B= A 2-2A 1,5 PUNTOS b) Determina los
Problemas elementales y soluciones difíciles
 Vol. XIII No 1 Junio (2005) Matemáticas: 15 30 Matemáticas: Enseñanza Universitaria c Escuela Regional de Matemáticas Universidad del Valle - Colombia Problemas elementales y soluciones difíciles Yu Takeuchi
Vol. XIII No 1 Junio (2005) Matemáticas: 15 30 Matemáticas: Enseñanza Universitaria c Escuela Regional de Matemáticas Universidad del Valle - Colombia Problemas elementales y soluciones difíciles Yu Takeuchi
CAPÍTULO 10 Aplicaciones de la Derivada a Funciones Económicas
 CAPÍTULO 10 Aplicaciones de la Derivada a Funciones Económicas Introducción En la economía, la variación de alguna cantidad con respecto a otra puede ser descrita por un concepto promedio o por un concepto
CAPÍTULO 10 Aplicaciones de la Derivada a Funciones Económicas Introducción En la economía, la variación de alguna cantidad con respecto a otra puede ser descrita por un concepto promedio o por un concepto
Tema 8: Análisis Discriminante. Clasificación. Aurea Grané Departamento de Estadística Universidad Carlos III de Madrid. Análisis discriminante
 Aurea Grané. Máster en Estadística. Universidade Pedagógica. 1 Aurea Grané. Máster en Estadística. Universidade Pedagógica. 2 Análisis discriminante Tema 8: Análisis Discriminante y Clasificación Aurea
Aurea Grané. Máster en Estadística. Universidade Pedagógica. 1 Aurea Grané. Máster en Estadística. Universidade Pedagógica. 2 Análisis discriminante Tema 8: Análisis Discriminante y Clasificación Aurea
Programación Lineal Entera
 Programación Lineal Entera Los modelos de programación entera son una extensión de los modelos lineales en los que algunas variables toman valores enteros. Con frecuencia las variables enteras sólo toman
Programación Lineal Entera Los modelos de programación entera son una extensión de los modelos lineales en los que algunas variables toman valores enteros. Con frecuencia las variables enteras sólo toman
1. Hallar los extremos de las funciones siguientes en las regiones especificadas:
 1 1. DERIVACIÓN 1. Hallar los extremos de las funciones siguientes en las regiones especificadas: b) f(x) x (x 1) en el intervalo [, ] y en su dominio. DOMINIO. D R. CORTES CON LOS EJES. Cortes con el
1 1. DERIVACIÓN 1. Hallar los extremos de las funciones siguientes en las regiones especificadas: b) f(x) x (x 1) en el intervalo [, ] y en su dominio. DOMINIO. D R. CORTES CON LOS EJES. Cortes con el
Dada la dificultad práctica para resolver de forma exacta toda una serie de problemas de
 CAPÍTULO 2 Métodos de solución Dada la dificultad práctica para resolver de forma exacta toda una serie de problemas de programación entera, se han desarrollado algoritmos que proporcionan soluciones factibles
CAPÍTULO 2 Métodos de solución Dada la dificultad práctica para resolver de forma exacta toda una serie de problemas de programación entera, se han desarrollado algoritmos que proporcionan soluciones factibles
Programación Lineal y Optimización Segundo Examen Parcial :Solución Profr. Eduardo Uresti, Verano 2009
 Programación Lineal y Optimización Segundo Examen Parcial : Profr. Eduardo Uresti, Verano 2009 Matrícula: Nombre: 1. Suponga que se tiene disponible la siguiente información salida de LINDO a un problema
Programación Lineal y Optimización Segundo Examen Parcial : Profr. Eduardo Uresti, Verano 2009 Matrícula: Nombre: 1. Suponga que se tiene disponible la siguiente información salida de LINDO a un problema
Tema 3: Aplicaciones de la diagonalización
 TEORÍA DE ÁLGEBRA II: Tema 3. DIPLOMATURA DE ESTADÍSTICA 1 Tema 3: Aplicaciones de la diagonalización 1 Ecuaciones en diferencias Estudiando la cría de conejos, Fibonacci llegó a las siguientes conclusiones:
TEORÍA DE ÁLGEBRA II: Tema 3. DIPLOMATURA DE ESTADÍSTICA 1 Tema 3: Aplicaciones de la diagonalización 1 Ecuaciones en diferencias Estudiando la cría de conejos, Fibonacci llegó a las siguientes conclusiones:
Optimización para ingenieros. Introducción
 Optimización para ingenieros Introducción 1er semestre de 2013 Optimización para ingenieros Objetivos del curso 2/22 Presentar la estructura para la formulación de problemas de optimización Discutir una
Optimización para ingenieros Introducción 1er semestre de 2013 Optimización para ingenieros Objetivos del curso 2/22 Presentar la estructura para la formulación de problemas de optimización Discutir una
Tipo de máquina Tiempo disponible. (h/maq. Por semana) Fresadora 500 Torno 350 Rectificadora 150
 Fresadora 500 Torno 350 Rectificadora 150") Ejercicios Tema 1. 1.- Utilizar el procedimiento gráfico para resolver los siguientes P.L. a) Max z = 10x 1 + 20x 2 s.a x 1 + 2x 2 15 x 1 + x 2 12 5x 1 + 3x 2 45 x 1,x 2 0 b) Max z = 2x 1 + x 2 s.a. x
Ejercicios Tema 1. 1.- Utilizar el procedimiento gráfico para resolver los siguientes P.L. a) Max z = 10x 1 + 20x 2 s.a x 1 + 2x 2 15 x 1 + x 2 12 5x 1 + 3x 2 45 x 1,x 2 0 b) Max z = 2x 1 + x 2 s.a. x
1.- Encontrar los intervalos de crecimiento y decrecimiento de las funciones:
 F. EJERCICIOS PROPUESTOS. 1.- Encontrar los intervalos de crecimiento y decrecimiento de las funciones: (a) f(x) =x 3 /3+3x 2 /2 10x. Resp.: Crece en (, 5) y en (2, ); decrece en ( 5, 2). (b) f(x) =x 3
F. EJERCICIOS PROPUESTOS. 1.- Encontrar los intervalos de crecimiento y decrecimiento de las funciones: (a) f(x) =x 3 /3+3x 2 /2 10x. Resp.: Crece en (, 5) y en (2, ); decrece en ( 5, 2). (b) f(x) =x 3
EL MÉTODO SIMPLEX ALGEBRAICO: MINIMIZACION. M. En C. Eduardo Bustos Farías
 EL MÉTODO SIMPLEX ALGEBRAICO: MINIMIZACION M. En C. Eduardo Bustos Farías 1 Minimización El método simplex puede aplicarse a un problema de minimización si se modifican los pasos del algoritmo: 1. Se cambia
EL MÉTODO SIMPLEX ALGEBRAICO: MINIMIZACION M. En C. Eduardo Bustos Farías 1 Minimización El método simplex puede aplicarse a un problema de minimización si se modifican los pasos del algoritmo: 1. Se cambia
Para hallar el límite de una sucesión podemos utilizar algunas técnicas como: El concepto de límite de una función:
 Tema 3 Sucesiones y Series 3.1. Sucesiones de números reales Definición 3.1.1 Una sucesión de números reales { } es una aplicación que asigna a cad N un número real: : N R a 1, a 2, a 3... son los términos
Tema 3 Sucesiones y Series 3.1. Sucesiones de números reales Definición 3.1.1 Una sucesión de números reales { } es una aplicación que asigna a cad N un número real: : N R a 1, a 2, a 3... son los términos
Problemas de Selectividad de Matemáticas II Comunidad de Madrid (Resueltos) Isaac Musat Hervás
 Isaac Musat Hervás") Problemas de Selectividad de Matemáticas II Comunidad de Madrid (Resueltos) Isaac Musat Hervás de mayo de 013 Capítulo 13 Año 01 13.1. Modelo 01 - Opción A Problema 13.1.1 (3 puntos) Dados los puntos A(1,
Problemas de Selectividad de Matemáticas II Comunidad de Madrid (Resueltos) Isaac Musat Hervás de mayo de 013 Capítulo 13 Año 01 13.1. Modelo 01 - Opción A Problema 13.1.1 (3 puntos) Dados los puntos A(1,
VECTORES. Módulo, dirección y sentido de un vector fijo En un vector fijo se llama módulo del mismo a la longitud del segmento que lo define.
 VECTORES El estudio de los vectores es uno de tantos conocimientos de las matemáticas que provienen de la física. En esta ciencia se distingue entre magnitudes escalares y magnitudes vectoriales. Se llaman
VECTORES El estudio de los vectores es uno de tantos conocimientos de las matemáticas que provienen de la física. En esta ciencia se distingue entre magnitudes escalares y magnitudes vectoriales. Se llaman
Tema 6: Problemas Especiales de Programación Lineal
 Tema 6: Problemas Especiales de Programación Lineal Transporte Asignación Transbordo Tienen una estructura especial que permite modelizar situaciones en las que es necesario: Determinar la manera óptima
Tema 6: Problemas Especiales de Programación Lineal Transporte Asignación Transbordo Tienen una estructura especial que permite modelizar situaciones en las que es necesario: Determinar la manera óptima
Escuela Politécnica Superior de Ingeniería Departamento de Ingeniería Informática
 Escuela Politécnica Superior de Ingeniería Departamento de Ingeniería Informática Fundamentos de la informática 2. Algoritmos, diagramas de flujo y pseudocódigo Contenido Algoritmos Diagramas de flujo
Escuela Politécnica Superior de Ingeniería Departamento de Ingeniería Informática Fundamentos de la informática 2. Algoritmos, diagramas de flujo y pseudocódigo Contenido Algoritmos Diagramas de flujo
El modelo EOQ básico (Economic Order Quantity) es el más simple y fundamental de todos los modelos de inventarios.
 es el más simple y fundamental de todos los modelos de inventarios.") Tema 7 Sistemas de Inventarios 7.1. Modelo EOQ básico El modelo EOQ básico (Economic Order Quantity) es el más simple y fundamental de todos los modelos de inventarios. 7.1.1. Hipótesis del modelo 1. Todos
Tema 7 Sistemas de Inventarios 7.1. Modelo EOQ básico El modelo EOQ básico (Economic Order Quantity) es el más simple y fundamental de todos los modelos de inventarios. 7.1.1. Hipótesis del modelo 1. Todos
(A) Primer parcial. si 1 x 1; x 3 si x>1. (B) Segundo parcial
 Primer parcial. si 1 x 1; x 3 si x>1. (B) Segundo parcial") CÁLCULO DIFERENCIAL E INTEGRAL I EVALUACIÓN GLOBAL E700 1) x 5 > 1. A) Primer parcial ) Sean las funciones ft) t +,gy) y 4&hw) w. Encontrar f/h, g f, f g y sus dominios. ) Graficar la función x + six
CÁLCULO DIFERENCIAL E INTEGRAL I EVALUACIÓN GLOBAL E700 1) x 5 > 1. A) Primer parcial ) Sean las funciones ft) t +,gy) y 4&hw) w. Encontrar f/h, g f, f g y sus dominios. ) Graficar la función x + six
Ejercicios de Programación Lineal
 Ejercicios de Programación Lineal Investigación Operativa Ingeniería Informática, UCM Curso 8/9 Una compañía de transporte dispone de camiones con capacidad de 4 libras y de 5 camiones con capacidad de
Ejercicios de Programación Lineal Investigación Operativa Ingeniería Informática, UCM Curso 8/9 Una compañía de transporte dispone de camiones con capacidad de 4 libras y de 5 camiones con capacidad de
Una función f es derivable en un punto a de su dominio si existe el límite. f(x) f(a) Si f y g son derivables en a, entonces fg es derivable en a y
 f(a) Si f y g son derivables en a, entonces fg es derivable en a y") 4. Derivabilidad 1 Una función f es derivable en un punto a de su dominio si existe el límite f (a) = lím x a f(x) f(a) x a f(a + h) f(a) = lím, h 0 h y es un número real. El número f (a) se denomina derivada
4. Derivabilidad 1 Una función f es derivable en un punto a de su dominio si existe el límite f (a) = lím x a f(x) f(a) x a f(a + h) f(a) = lím, h 0 h y es un número real. El número f (a) se denomina derivada
Funciones vectoriales de variable vectorial. Son aplicaciones entre espacios eucĺıdeos, IR n, f : X IR n Y IR m
 Funciones vectoriales de variable vectorial Son aplicaciones entre espacios eucĺıdeos, IR n, f : X IR n Y IR m x y x = (x 1, x 2,, x n ), y = (y 1, y 2,, y m ) e y j = f j (x 1, x 2,, x n ), 1 j n n =
Funciones vectoriales de variable vectorial Son aplicaciones entre espacios eucĺıdeos, IR n, f : X IR n Y IR m x y x = (x 1, x 2,, x n ), y = (y 1, y 2,, y m ) e y j = f j (x 1, x 2,, x n ), 1 j n n =
Capitulo 4. Polinomios
 Capitulo 4. Polinomios Objetivo. El alumno usará y analizará los conceptos del álgebra de los polinomios y sus propiedades para obtener raíces. Contenido. 4.1 Definición de polinomio. Grado de un polinomio.
Capitulo 4. Polinomios Objetivo. El alumno usará y analizará los conceptos del álgebra de los polinomios y sus propiedades para obtener raíces. Contenido. 4.1 Definición de polinomio. Grado de un polinomio.
Una invitación al estudio de las cadenas de Markov
 Una invitación al estudio de las cadenas de Markov Víctor RIVERO Centro de Investigación en Matemáticas A. C. Taller de solución de problemas de probabilidad, 21-25 de Enero de 2008. 1/ 1 Introducción
Una invitación al estudio de las cadenas de Markov Víctor RIVERO Centro de Investigación en Matemáticas A. C. Taller de solución de problemas de probabilidad, 21-25 de Enero de 2008. 1/ 1 Introducción
3.1. Concepto de función. Dominio, recorrido y gráfica. 3.1.1. Concepto de función
 TEMA 3 FUNCIONES 3.1. Concepto de función. Dominio, recorrido y gráfica. 3.1.1. Concepto de función Una función es una relación establecida entre dos variables que asocia a cada valor de la primera variable
TEMA 3 FUNCIONES 3.1. Concepto de función. Dominio, recorrido y gráfica. 3.1.1. Concepto de función Una función es una relación establecida entre dos variables que asocia a cada valor de la primera variable
Finanzas de Empresas Turísticas
 Finanzas de Empresas Turísticas Prof. Francisco Pérez Hernández (f.perez@uam.es) Departamento de Financiación e Investigación de la Universidad Autónoma de Madrid 1 Departamento de Financiación e Investigación
Finanzas de Empresas Turísticas Prof. Francisco Pérez Hernández (f.perez@uam.es) Departamento de Financiación e Investigación de la Universidad Autónoma de Madrid 1 Departamento de Financiación e Investigación
Juegos. Esquema. Introducción: juegos como búsqueda Decisiones perfectas Decisiones imperfectas Poda α β
 Juegos Transparencias IA (F29) M.Marcos, 2002 (Figuras c S.Russell & P.Norvig, 1998) 1 Esquema Introducción: juegos como búsqueda Decisiones perfectas Decisiones imperfectas Poda α β Transparencias IA
Juegos Transparencias IA (F29) M.Marcos, 2002 (Figuras c S.Russell & P.Norvig, 1998) 1 Esquema Introducción: juegos como búsqueda Decisiones perfectas Decisiones imperfectas Poda α β Transparencias IA
b) Para encontrar los intervalos de crecimiento y decrecimiento, hay que derivar la función. Como que se trata de un cociente, aplicamos la fórmula:
 Para encontrar los intervalos de crecimiento y decrecimiento, hay que derivar la función. Como que se trata de un cociente, aplicamos la fórmula:") 1. Dada la función f(x) = : a) Encontrar el dominio, las AH y las AV. b) Intervalos de crecimiento, decrecimiento, máximos y mínimos relativos. c) Primitiva que cumpla que F(0) = 0. a) Para encontrar el
1. Dada la función f(x) = : a) Encontrar el dominio, las AH y las AV. b) Intervalos de crecimiento, decrecimiento, máximos y mínimos relativos. c) Primitiva que cumpla que F(0) = 0. a) Para encontrar el
Álgebra Vectorial. Principios de Mecánica. Licenciatura de Física. Curso 2007-2008. 1
 Álgebra Vectorial Principios de Mecánica. Licenciatura de Física. Curso 2007-2008. 1 Indice. 1. Magnitudes Escalares y Vectoriales. 2. Vectores. 3. Suma de Vectores. Producto de un vector por un escalar.
Álgebra Vectorial Principios de Mecánica. Licenciatura de Física. Curso 2007-2008. 1 Indice. 1. Magnitudes Escalares y Vectoriales. 2. Vectores. 3. Suma de Vectores. Producto de un vector por un escalar.
EL ALGORITMO DEL SIMPLEX PARA
 FLUJOS SOBRE REDES Presentación y definiciones. Modelos de flujos sobre redes (I). Modelo de transporte y asignación. Problema de Coste Mínimo (Min-Cost). EL ALGORITMO DEL SIMPLEX PARA Min-Cost. Soluciones
FLUJOS SOBRE REDES Presentación y definiciones. Modelos de flujos sobre redes (I). Modelo de transporte y asignación. Problema de Coste Mínimo (Min-Cost). EL ALGORITMO DEL SIMPLEX PARA Min-Cost. Soluciones
Support Vector Machine
 Juan Carlos Caicedo Juan Carlos Mendivelso Maestria en Ingenieria de Sistemas y Computacion Universidad Nacional de Colombia 20 de marzo de 2007 Agenda 1 2 3 4 Outline 1 2 3 4 Clasificador lineal que utiliza
Juan Carlos Caicedo Juan Carlos Mendivelso Maestria en Ingenieria de Sistemas y Computacion Universidad Nacional de Colombia 20 de marzo de 2007 Agenda 1 2 3 4 Outline 1 2 3 4 Clasificador lineal que utiliza
1. Ecuaciones no lineales
 1. Ecuaciones no lineales 1.1 Ejercicios resueltos Ejercicio 1.1 Dada la ecuación xe x 1 = 0, se pide: a) Estudiar gráficamente sus raíces reales y acotarlas. b) Aplicar el método de la bisección y acotar
1. Ecuaciones no lineales 1.1 Ejercicios resueltos Ejercicio 1.1 Dada la ecuación xe x 1 = 0, se pide: a) Estudiar gráficamente sus raíces reales y acotarlas. b) Aplicar el método de la bisección y acotar
Métodos generales de generación de variables aleatorias
 Tema Métodos generales de generación de variables aleatorias.1. Generación de variables discretas A lo largo de esta sección, consideraremos una variable aleatoria X cuya función puntual es probabilidad
Tema Métodos generales de generación de variables aleatorias.1. Generación de variables discretas A lo largo de esta sección, consideraremos una variable aleatoria X cuya función puntual es probabilidad
CAPÍTULO 3. ALGORITMOS DE PREVISIÓN BASADOS EN LA EXTRAPOLACIÓN DE LOS DATOS MÁS RECIENTES
 CAPÍTULO 3. ALGORITMOS DE PREVISIÓN BASADOS EN LA EXTRAPOLACIÓN DE LOS DATOS MÁS RECIENTES El objetivo de esta tesina es la introducción de mejoras en la previsión meteorológica a corto plazo. El punto
CAPÍTULO 3. ALGORITMOS DE PREVISIÓN BASADOS EN LA EXTRAPOLACIÓN DE LOS DATOS MÁS RECIENTES El objetivo de esta tesina es la introducción de mejoras en la previsión meteorológica a corto plazo. El punto
Para cada cada valor de la función original lo multiplicas por 3 lo recorres 45 a la derecha y lo subes 5 unidades.
 3.5 Gráficas de las funciones: f(x) = a sen (bx + c) + d f(x) = a cos (bx + c) + d f(x) = a tan (bx + c) + d en donde a, b, c, y d son números reales En la sección 3.4 ya realizamos algunos ejemplos en
3.5 Gráficas de las funciones: f(x) = a sen (bx + c) + d f(x) = a cos (bx + c) + d f(x) = a tan (bx + c) + d en donde a, b, c, y d son números reales En la sección 3.4 ya realizamos algunos ejemplos en
Capítulo 3 Soluciones de ejercicios seleccionados
 Capítulo 3 Soluciones de ejercicios seleccionados Sección 3.1.4 1. Dom a = [ 1, 1]. Dom b = R. Dom c = (, 4). Dom d = ( 1, ). Dom e = R ( 1, 3] y Dom f = R {, }. 5x 4 x < 1, (x 1)(3x ) x < 1,. (f + g)(x)
Capítulo 3 Soluciones de ejercicios seleccionados Sección 3.1.4 1. Dom a = [ 1, 1]. Dom b = R. Dom c = (, 4). Dom d = ( 1, ). Dom e = R ( 1, 3] y Dom f = R {, }. 5x 4 x < 1, (x 1)(3x ) x < 1,. (f + g)(x)
Instituto Politécnico Nacional Escuela Superior de Cómputo. Modelos de ubicación. M. En C. Eduardo Bustos Farías
 Instituto Politécnico Nacional Escuela Superior de Cómputo Modelos de ubicación M. En C. Eduardo Bustos Farías 1 Objetivos Describir los factores que influyen las decisiones sobre Localización en manufacturas
Instituto Politécnico Nacional Escuela Superior de Cómputo Modelos de ubicación M. En C. Eduardo Bustos Farías 1 Objetivos Describir los factores que influyen las decisiones sobre Localización en manufacturas
Inteligencia Artificial Búsqueda entre adversarios
 Inteligencia Artificial Búsqueda entre adversarios Primavera 27 profesor: Luigi Ceccaroni Juegos En los entornos multiagente (cooperativos o competitivos), cualquier agente tiene que considerar las acciones
Inteligencia Artificial Búsqueda entre adversarios Primavera 27 profesor: Luigi Ceccaroni Juegos En los entornos multiagente (cooperativos o competitivos), cualquier agente tiene que considerar las acciones
UNIDAD 4 PROCESOS DE MARKOV
 UNIDAD 4 PROCESOS DE MARKOV Anteriormente se han cubierto modelos estáticos, esto es, modelos cuyos parámetros permanecen sin cambio a través del tiempo. Con excepción de programación dinámica donde se
UNIDAD 4 PROCESOS DE MARKOV Anteriormente se han cubierto modelos estáticos, esto es, modelos cuyos parámetros permanecen sin cambio a través del tiempo. Con excepción de programación dinámica donde se
Problemas y Ejercicios Resueltos. Tema 2: Espacios vectoriales.
 Problemas y Ejercicios Resueltos. Tema : Espacios vectoriales. Ejercicios 1.- Determinar el valor de x para que el vector (1, x, 5) R 3 pertenezca al subespacio < (1,, 3), (1, 1, 1) >. Solución. (1, x,
Problemas y Ejercicios Resueltos. Tema : Espacios vectoriales. Ejercicios 1.- Determinar el valor de x para que el vector (1, x, 5) R 3 pertenezca al subespacio < (1,, 3), (1, 1, 1) >. Solución. (1, x,
Programación Lineal Continua/ Investigación Operativa. EJERCICIOS DE INVESTIGACIÓN OPERATIVA. Hoja 1
 EJERCICIOS DE INVESTIGACIÓN OPERATIVA. Hoja 1 1. Una empresa que fabrica vehículos quiere determinar un plan de producción semanal. Esta empresa dispone de 5 fábricas que producen distintos elementos del
EJERCICIOS DE INVESTIGACIÓN OPERATIVA. Hoja 1 1. Una empresa que fabrica vehículos quiere determinar un plan de producción semanal. Esta empresa dispone de 5 fábricas que producen distintos elementos del
Organización como función administrativa Resumen para Administración y Gestión Profesor: Gonzalo V.
 Organización como función administrativa Introducción: Organización rganización como función administrativa En las organizaciones que se caracterizan por estar orientadas al éxito, a la eficiencia y al
Organización como función administrativa Introducción: Organización rganización como función administrativa En las organizaciones que se caracterizan por estar orientadas al éxito, a la eficiencia y al
Unidad 2 Método gráfico de solución
 Unidad 2 Método gráfico de solución Los problemas de programación lineal (pl) que sólo tengan dos variables de decisión pueden resolverse gráficamente, ya que, como se ha visto en los Antecedentes, una
Unidad 2 Método gráfico de solución Los problemas de programación lineal (pl) que sólo tengan dos variables de decisión pueden resolverse gráficamente, ya que, como se ha visto en los Antecedentes, una
EJERCICIOS DE PROGRAMACIÓN LINEAL
 EJERCICIOS DE PROGRAMACIÓN LINEAL 1. Disponemos de 210.000 euros para invertir en bolsa. Nos recomiendan dos tipos de acciones. Las del tipo A, que rinden el 10% y las del tipo B, que rinden el 8%. Decidimos
EJERCICIOS DE PROGRAMACIÓN LINEAL 1. Disponemos de 210.000 euros para invertir en bolsa. Nos recomiendan dos tipos de acciones. Las del tipo A, que rinden el 10% y las del tipo B, que rinden el 8%. Decidimos
EL MÉTODO DE LA BISECCIÓN
 EL MÉTODO DE LA BISECCIÓN Teorema de Bolzano Sea f : [a, b] IR IR una función continua en [a, b] tal que f(a) f(b) < 0, es decir, que tiene distinto signo en a y en b. Entonces, existe c (a, b) tal que
EL MÉTODO DE LA BISECCIÓN Teorema de Bolzano Sea f : [a, b] IR IR una función continua en [a, b] tal que f(a) f(b) < 0, es decir, que tiene distinto signo en a y en b. Entonces, existe c (a, b) tal que
CAPITULO 3. Aplicaciones de la Derivada. Licda. Elsie Hernández Saborío. Instituto Tecnológico de Costa Rica. Escuela de Matemática
 CAPITULO Aplicaciones de la Derivada Licda. Elsie Hernández Saborío Instituto Tecnológico de Costa Rica Escuela de Matemática Créditos Primera edición impresa: Rosario Álvarez, 1988. Edición Latex: Marieth
CAPITULO Aplicaciones de la Derivada Licda. Elsie Hernández Saborío Instituto Tecnológico de Costa Rica Escuela de Matemática Créditos Primera edición impresa: Rosario Álvarez, 1988. Edición Latex: Marieth
1. Derivadas parciales
 Análisis Matemático II. Curso 2009/2010. Diplomatura en Estadística/Ing. Téc. en Inf. de Gestión. Universidad de Jaén TEMA 3. ABLES DIFERENCIACIÓN DE FUNCIONES DE VARIAS VARI- 1. Derivadas parciales Para
Análisis Matemático II. Curso 2009/2010. Diplomatura en Estadística/Ing. Téc. en Inf. de Gestión. Universidad de Jaén TEMA 3. ABLES DIFERENCIACIÓN DE FUNCIONES DE VARIAS VARI- 1. Derivadas parciales Para
Funciones de varias variables
 Capítulo 2 Funciones de varias variables 1. Definiciones básicas En este texto consideraremos funciones f : A R m, A R n. Dichas funciones son comúnmente denominadas como funciones de varias variables,
Capítulo 2 Funciones de varias variables 1. Definiciones básicas En este texto consideraremos funciones f : A R m, A R n. Dichas funciones son comúnmente denominadas como funciones de varias variables,
Introducción a los sistemas disipativos y prueba del Teorema de pequeña ganancia
 Introducción a los sistemas disipativos y prueba del Teorema de pequeña ganancia Gabriel Tucci Scuadroni Profesor: Álvaro Giusto 14 de diciembre de 2002 Control Robusto Ingeniería Electrica Universidad
Introducción a los sistemas disipativos y prueba del Teorema de pequeña ganancia Gabriel Tucci Scuadroni Profesor: Álvaro Giusto 14 de diciembre de 2002 Control Robusto Ingeniería Electrica Universidad
Tema 5. Aproximación funcional local: Polinomio de Taylor. 5.1 Polinomio de Taylor
 Tema 5 Aproximación funcional local: Polinomio de Taylor Teoría Los polinomios son las funciones reales más fáciles de evaluar; por esta razón, cuando una función resulta difícil de evaluar con exactitud,
Tema 5 Aproximación funcional local: Polinomio de Taylor Teoría Los polinomios son las funciones reales más fáciles de evaluar; por esta razón, cuando una función resulta difícil de evaluar con exactitud,
1. Definición 2. Operaciones con funciones
 1. Definición 2. Operaciones con funciones 3. Estudio de una función: Suma y diferencia Producto Cociente Composición de funciones Función reciproca (inversa) Dominio Recorrido Puntos de corte Signo de
1. Definición 2. Operaciones con funciones 3. Estudio de una función: Suma y diferencia Producto Cociente Composición de funciones Función reciproca (inversa) Dominio Recorrido Puntos de corte Signo de
(2.a) INTRODUCCIÓN A LA FORMULACIÓN DE MODELOS LINEALES
 INTRODUCCIÓN A LA FORMULACIÓN DE MODELOS LINEALES") (2.a) INTRODUCCIÓN A LA FORMULACIÓN DE MODELOS LINEALES PROBLEMAS DE PROGRAMACIÓN LINEAL. Función objetivo y restricciones. HIPÓTESIS DE MODELIZACIÓN. Ejemplos: problema de producción, problema de dietas.
(2.a) INTRODUCCIÓN A LA FORMULACIÓN DE MODELOS LINEALES PROBLEMAS DE PROGRAMACIÓN LINEAL. Función objetivo y restricciones. HIPÓTESIS DE MODELIZACIÓN. Ejemplos: problema de producción, problema de dietas.
UNIVERSIDAD DIEGO PORTALES. FACULTAD DE INGENIERIA. ESCUELA DE INGENIERIA INDUSTRIAL.
 UNIVERSIDAD DIEGO PORTALES. FACULTAD DE INGENIERIA. ESCUELA DE INGENIERIA INDUSTRIAL. Optimización, Pauta Solemne 2. Semestre Primavera 2011 Profesores: Paul Bosch, Fernando Paredes, Pablo Rey Tiempo:
UNIVERSIDAD DIEGO PORTALES. FACULTAD DE INGENIERIA. ESCUELA DE INGENIERIA INDUSTRIAL. Optimización, Pauta Solemne 2. Semestre Primavera 2011 Profesores: Paul Bosch, Fernando Paredes, Pablo Rey Tiempo:
Cinemática en una Dimensión. Posición, velocidad. Cantidades vectoriales: operación de suma y diferencia.
 Cinemática en una Dimensión. Posición, velocidad. Cantidades vectoriales: operación de suma y diferencia. Resumen Para cualquier numero que resulte de una medición es importante especificar su incertidumbre
Cinemática en una Dimensión. Posición, velocidad. Cantidades vectoriales: operación de suma y diferencia. Resumen Para cualquier numero que resulte de una medición es importante especificar su incertidumbre
Modelando la cadena de suministro como un problema de programación multinivel y su solución a través de la programación multiparamétrica
 Modelando la cadena de suministro como un problema de programación multinivel y su solución a través de la programación multiparamétrica Introducción La importancia de la cadena de suministro Lo siento,
Modelando la cadena de suministro como un problema de programación multinivel y su solución a través de la programación multiparamétrica Introducción La importancia de la cadena de suministro Lo siento,
www.abaco.com.ve www.abrakadabra.com.ve www.miprofe.com.ve
 Autor: José Arturo Barreto M.A. Páginas web: www.abaco.com.ve www.abrakadabra.com.ve www.miprofe.com.ve Correo electrónico: josearturobarreto@yahoo.com Capítulo I El Problema 1.1 Planteamiento del problema
Autor: José Arturo Barreto M.A. Páginas web: www.abaco.com.ve www.abrakadabra.com.ve www.miprofe.com.ve Correo electrónico: josearturobarreto@yahoo.com Capítulo I El Problema 1.1 Planteamiento del problema
Sistemas de ayuda a la decisión Tema 5. Análisis de Sensibilidad Análisis Cualitivo y Análisis Paramétrico
 Tema 5. Análisis de Sensibilidad Análisis Cualitivo y Análisis Paramétrico Indice 1) Motivavión, Identifición y Estructuración del problema 2) Análisis Paramétrico: Medidas basadas en distancias de umbral
Tema 5. Análisis de Sensibilidad Análisis Cualitivo y Análisis Paramétrico Indice 1) Motivavión, Identifición y Estructuración del problema 2) Análisis Paramétrico: Medidas basadas en distancias de umbral
Límites y Continuidad de funciones
 CAPITULO Límites y Continuidad de funciones Licda. Elsie Hernández Saborío Instituto Tecnológico de Costa Rica Escuela de Matemática Revista digital Matemática, educación e internet (www.cidse.itcr.ac.cr)
CAPITULO Límites y Continuidad de funciones Licda. Elsie Hernández Saborío Instituto Tecnológico de Costa Rica Escuela de Matemática Revista digital Matemática, educación e internet (www.cidse.itcr.ac.cr)
(a) El triángulo dado se descompone en tres segmentos de recta que parametrizamos de la siguiente forma: (0 t 1); y = 0. { x = 1 t y = t. (0 t 1).
 El triángulo dado se descompone en tres segmentos de recta que parametrizamos de la siguiente forma: (0 t 1); y = 0. { x = 1 t y = t. (0 t 1).") INTEGRALES DE LÍNEA. 15. alcular las siguientes integrales: (a) (x + y) ds donde es el borde del triángulo con vértices (, ), (1, ), (, 1). (b) x + y ds donde es la circunferencia x + y ax (a > ). (a)
INTEGRALES DE LÍNEA. 15. alcular las siguientes integrales: (a) (x + y) ds donde es el borde del triángulo con vértices (, ), (1, ), (, 1). (b) x + y ds donde es la circunferencia x + y ax (a > ). (a)
Soluciones a los problemas Olimpiada de Matemáticas Fase local Extremadura Enero de 2015
 Olimpiada atemática Española RSE Soluciones a los problemas Olimpiada de atemáticas Fase local Extremadura Enero de 2015 1. lrededor de una mesa circular están sentadas seis personas. ada una lleva un
Olimpiada atemática Española RSE Soluciones a los problemas Olimpiada de atemáticas Fase local Extremadura Enero de 2015 1. lrededor de una mesa circular están sentadas seis personas. ada una lleva un
S n = 3n + 2 n + 4. ln(1 + a n ) (3) Decidir, para cada una de las siguientes series, si es convergente o divergente.
 (3) Decidir, para cada una de las siguientes series, si es convergente o divergente.") CÁLCULO HOJA 1 INGENIERO TÉCNICO EN INFORMÁTICA DE SISTEMAS GRUPO DE MAÑANA, MÓSTOLES, 2008-09 (1) De la serie a n se sabe que la sucesión de sumas parciales viene dada por: S n = 3n + 2 n + 4. Encontrar
CÁLCULO HOJA 1 INGENIERO TÉCNICO EN INFORMÁTICA DE SISTEMAS GRUPO DE MAÑANA, MÓSTOLES, 2008-09 (1) De la serie a n se sabe que la sucesión de sumas parciales viene dada por: S n = 3n + 2 n + 4. Encontrar
Capitán de fragata ingeniero AGUSTÍN E. GONZÁLEZ MORALES. ÁLGEBRA PARA INGENIEROS (Solucionario)
") Capitán de fragata ingeniero AGUSTÍN E. GONZÁLEZ MORALES ÁLGEBRA PARA INGENIEROS (Solucionario) 2 Í N D I C E CAPÍTULO : MATRICES, DETERMINANTES Y SISTEMAS DE ECUACIONES LINEALES CAPÍTULO 2: ESPACIOS VECTORIALES
Capitán de fragata ingeniero AGUSTÍN E. GONZÁLEZ MORALES ÁLGEBRA PARA INGENIEROS (Solucionario) 2 Í N D I C E CAPÍTULO : MATRICES, DETERMINANTES Y SISTEMAS DE ECUACIONES LINEALES CAPÍTULO 2: ESPACIOS VECTORIALES
ALGORITMOS GEOMÉTRICOS. Análisis y diseño de algoritmos II- 2009
 ALGORITMOS GEOMÉTRICOS Análisis y diseño de algoritmos II- 2009 La geometría computacional es una rama de la ciencia de la computación que estudia algoritmos para resolver problemas geométricos. Aplicaciones
ALGORITMOS GEOMÉTRICOS Análisis y diseño de algoritmos II- 2009 La geometría computacional es una rama de la ciencia de la computación que estudia algoritmos para resolver problemas geométricos. Aplicaciones
TEORÍA TEMA 9. 2. Definición de ESFUERZOS CARACTERÍSTICOS ( Mf.; Q; N)
") 1. Definición de Viga de alma llena TEORÍA TEMA 9 2. Definición de ESFUERZOS CARACTERÍSTICOS ( Mf.; Q; N) 3. Determinación de los esfuerzos característicos i. Concepto de Polígonos de Presiones ii. Caso
1. Definición de Viga de alma llena TEORÍA TEMA 9 2. Definición de ESFUERZOS CARACTERÍSTICOS ( Mf.; Q; N) 3. Determinación de los esfuerzos característicos i. Concepto de Polígonos de Presiones ii. Caso
TÉCNICAS DE PLANIFICACIÓN Y CONTROL DE PROYECTOS 1
 Técnicas de planificación y control de proyectos Andrés Ramos Universidad Pontificia Comillas http://www.iit.comillas.edu/aramos/ Andres.Ramos@comillas.edu TÉCNICAS DE PLANIFICACIÓN Y CONTROL DE PROYECTOS
Técnicas de planificación y control de proyectos Andrés Ramos Universidad Pontificia Comillas http://www.iit.comillas.edu/aramos/ Andres.Ramos@comillas.edu TÉCNICAS DE PLANIFICACIÓN Y CONTROL DE PROYECTOS
Gestión de Riesgos - Introducción
 Temario de la clase Gestión de Riesgos Definiciones Tipos de Riesgos Análisis de Riesgos Resolución de Riesgos Gestión de Riesgos - Introducción El riesgo implica: Riesgo: Definiremos como Riesgo a cualquier
Temario de la clase Gestión de Riesgos Definiciones Tipos de Riesgos Análisis de Riesgos Resolución de Riesgos Gestión de Riesgos - Introducción El riesgo implica: Riesgo: Definiremos como Riesgo a cualquier
OPTIMIZACIÓN ESCALAR. María Jesús de la Fuente Aparicio Dpto. Ingeniería de Sistemas y Automática
 OPTIMIZACIÓN ESCALAR María Jesús de la Fuente Aparicio Dpto. Ingeniería de Sistemas y Automática CONCEPTOS BÁSICOS DEFINICIONES Definiciones Optimo local (mínimo local) Un punto * F se denomina un mínimo
OPTIMIZACIÓN ESCALAR María Jesús de la Fuente Aparicio Dpto. Ingeniería de Sistemas y Automática CONCEPTOS BÁSICOS DEFINICIONES Definiciones Optimo local (mínimo local) Un punto * F se denomina un mínimo
Usamos que f( p) = q y que, por tanto, g( q) = g(f( p)) = h( p) para simplificar esta expresión:
 = q y que, por tanto, g( q) = g(f( p)) = h( p) para simplificar esta expresión:") Univ. de Alcalá de Henares Ingeniería de Telecomunicación Cálculo. Segundo parcial. Curso 2004-2005 Propiedades de las funciones diferenciables. 1. Regla de la cadena Después de la generalización que hemos
Univ. de Alcalá de Henares Ingeniería de Telecomunicación Cálculo. Segundo parcial. Curso 2004-2005 Propiedades de las funciones diferenciables. 1. Regla de la cadena Después de la generalización que hemos
Concepto de función. El subconjunto en el que se define la función se llama dominio o campo existencia de la función. Se designa por D.
 Concepto de función Dados dos conjuntos A y B, llamamos función a la correspondencia de A en B en la cual todos los elementos de A tienen a lo sumo una imagen en B, es decir una imagen o ninguna. Función
Concepto de función Dados dos conjuntos A y B, llamamos función a la correspondencia de A en B en la cual todos los elementos de A tienen a lo sumo una imagen en B, es decir una imagen o ninguna. Función
Problemas Resueltos de Ecuaciones en Derivadas Parciales
 Problemas Resueltos de Ecuaciones en Derivadas Parciales Alberto Cabada Fernández 4 de diciembre de. Índice general Introducción I. Ecuaciones de primer orden.. Método de las bandas características...................
Problemas Resueltos de Ecuaciones en Derivadas Parciales Alberto Cabada Fernández 4 de diciembre de. Índice general Introducción I. Ecuaciones de primer orden.. Método de las bandas características...................
Apuntes de cálculo diferencial en una y varias variables reales. Eduardo Liz Marzán
 Apuntes de cálculo diferencial en una y varias variables reales Eduardo Liz Marzán Diciembre de 2013 Índice general 1 Preliminares 1 11 Introducción 1 12 La relación de orden en el conjunto de los números
Apuntes de cálculo diferencial en una y varias variables reales Eduardo Liz Marzán Diciembre de 2013 Índice general 1 Preliminares 1 11 Introducción 1 12 La relación de orden en el conjunto de los números
euresti@itesm.mx Matemáticas
 al Método al Método Matemáticas al Método En esta lectura daremos una introducción al método desarrollado por George Bernard Dantzig (8 de noviembre de 1914-13 de mayo de 2005) en 1947. Este método se
al Método al Método Matemáticas al Método En esta lectura daremos una introducción al método desarrollado por George Bernard Dantzig (8 de noviembre de 1914-13 de mayo de 2005) en 1947. Este método se
Herramientas digitales de auto-aprendizaje para Matemáticas
 Herramientas digitales de auto-aprendizaje para Matemáticas, Grupo de Innovación Didáctica Departamento de Matemáticas Universidad de Extremadura Índice Dada una función f : D R R y un intervalo I D
Herramientas digitales de auto-aprendizaje para Matemáticas, Grupo de Innovación Didáctica Departamento de Matemáticas Universidad de Extremadura Índice Dada una función f : D R R y un intervalo I D
Cálculo de las Acciones Motoras en Mecánica Analítica
 Cálculo de las Acciones Motoras en Mecánica Analítica 1. Planteamiento general El diseño típico de la motorización de un sistema mecánico S es el que se muestra en la figura 1. Su posición viene definida
Cálculo de las Acciones Motoras en Mecánica Analítica 1. Planteamiento general El diseño típico de la motorización de un sistema mecánico S es el que se muestra en la figura 1. Su posición viene definida
Representación gráfica de funciones
 Gráfica de una fución Representación gráfica de funciones La gráfica de una función está formada por el conjunto de puntos (x, y) para todos los valores de x pertenecientes al Dominio de la función gráfica
Gráfica de una fución Representación gráfica de funciones La gráfica de una función está formada por el conjunto de puntos (x, y) para todos los valores de x pertenecientes al Dominio de la función gráfica
Cadenas de Markov y Perron-Frobenius
 Cadenas de Markov y Perron-Frobenius Pablo Lessa 10 de octubre de 2014 1. Cadenas de Markov En 1996 Larry Page y Sergey Brin, en ese momento en Stanford, inventaron una manera de asignar un ranking de
Cadenas de Markov y Perron-Frobenius Pablo Lessa 10 de octubre de 2014 1. Cadenas de Markov En 1996 Larry Page y Sergey Brin, en ese momento en Stanford, inventaron una manera de asignar un ranking de
Programación Lineal y Optimización Segundo Examen Parcial Respuesta: :Solución Profr. Eduardo Uresti, Enero-Mayo 2011
 Matrícula: Nombre: Programación Lineal y Optimización Segundo Examen Parcial Respuesta: : Profr. Eduardo Uresti, Enero-Mayo 2011 1. Suponga que tiene una empresa que produce tres tipos de productos (P
Matrícula: Nombre: Programación Lineal y Optimización Segundo Examen Parcial Respuesta: : Profr. Eduardo Uresti, Enero-Mayo 2011 1. Suponga que tiene una empresa que produce tres tipos de productos (P
MATEMÁTICAS para estudiantes de primer curso de facultades y escuelas técnicas
 Universidad de Cádiz Departamento de Matemáticas MATEMÁTICAS para estudiantes de primer curso de facultades y escuelas técnicas Tema Representación gráfica de funciones reales de una variable real Elaborado
Universidad de Cádiz Departamento de Matemáticas MATEMÁTICAS para estudiantes de primer curso de facultades y escuelas técnicas Tema Representación gráfica de funciones reales de una variable real Elaborado
GASTO METABOLICO DE ENERGIA
 GASTO METABOLICO DE ENERGIA Indice Introducción Conceptos Básicos de Metabolismo Métodos Usados para Evaluar la Demanda Metabólica de una Tarea Desarrollo del Método Predictivo AAMA Cálculos del Modelo
GASTO METABOLICO DE ENERGIA Indice Introducción Conceptos Básicos de Metabolismo Métodos Usados para Evaluar la Demanda Metabólica de una Tarea Desarrollo del Método Predictivo AAMA Cálculos del Modelo
C u r s o : Matemática ENSAYO EX CÁTEDRA Nº 2 MATEMÁTICA
 u r s o : Matemática ENSYO EX ÁTER Nº MTEMÁTI PSU MTEMÁTI INSTRUIONES ESPEÍFIS. Esta prueba consta de 70 preguntas. Usted dispone de horas y 5 minutos para responderla.. continuación encontrará una serie
u r s o : Matemática ENSYO EX ÁTER Nº MTEMÁTI PSU MTEMÁTI INSTRUIONES ESPEÍFIS. Esta prueba consta de 70 preguntas. Usted dispone de horas y 5 minutos para responderla.. continuación encontrará una serie