SISTEMAS INTELIGENTES
|
|
|
- María Rosario Toro González
- hace 8 años
- Vistas:
Transcripción
1 SISTEMAS INTELIGENTES T11: Métodos Kernel: Máquinas de vectores soporte {jdiez, aic.uniovi.es

2 Índice Funciones y métodos kernel Concepto: representación de datos Características y ventajas Funciones más usadas Kernelización de algoritmos Máquinas Vectores Soporte (SVM) Concepto de Margen: maximización Teoría: Optimización de funciones Clasificación: caso separable y margen blando Regresión

3 Kernels (I) Constituyen un forma estándar de representar los datos Hay datos que no se pueden representar mediante vectores Ejemplo: cadenas genéticas Sustituyen las representaciones vectoriales por otra genérica aplicable a datos no vectoriales Permiten construir algoritmos de aprendizaje genéricos que pueden utilizarse sobre cualquier tipo de dato (vectorial o no)

4 Kernels (II) Representamos los datos mediante un matriz cuadrada donde cada elemento mide la similitud entre dos ejemplos

5 Kernels (III) Atributos Atr-1 Atr-n Clase(opcional) ejemplo 1 clase ej-1 ejemplo n clase ej-n K Ej 1 Ej j Ej n Ej 1 k(x 1,x 1 ) k(x 1,x j ) k(x 1,x n ) Ej i k(x i,x 1 ) k(x i,x j ) k(x i,x n ) Ej n k(x n,x 1 ) k(x n,x j ) k(x n,x n )
 k(x i,x n ) Ej n k(x n,x 1 ) k(x n,x j ) k(x")
6 Funciones kernel: idea Representar la similitud entre dos objetos Aproximación General

7 Producto escalar Induce una métrica: (1) norma (2) distancia Interpretación geométrica: Salvo escala de los vectores, el producto escalar mide la separación geométrica de sus direcciones. Esta medida está comprendida entre -1 y +1: Es máxima (+1) cuando coinciden y Mínima (-1) cuando son opuestos Es 0 cuando son perpendiculares
 cuando coinciden y")
8 Funciones kernel (I) Simétrica Semidefinida positiva Si es simétrica y semidefinida positiva, entonces existe un espacio de Hilbert y una función tal que

9 Funciones Kernel (II) Si son kernels en entonces también son kernels

10 Ejemplos de Funciones Kernel Kernel Lineal Kernel Polinómico Kernel Gaussiano Kernel string, kernel booleano,

11 Métodos Kernel Son los métodos de aprendizaje que usan para representar los ejemplos de entrenamiento a través de matrices calculadas mediante la aplicación de funciones kernel Son métodos genéricos Kernelización: siempre que un algoritmo se puede expresar en términos de productos escalares en el espacio de entrada, se pueden reemplazar por productos escalares en un cierto espacio de características mediante una función kernel

12 Clasificación por mínima distancia

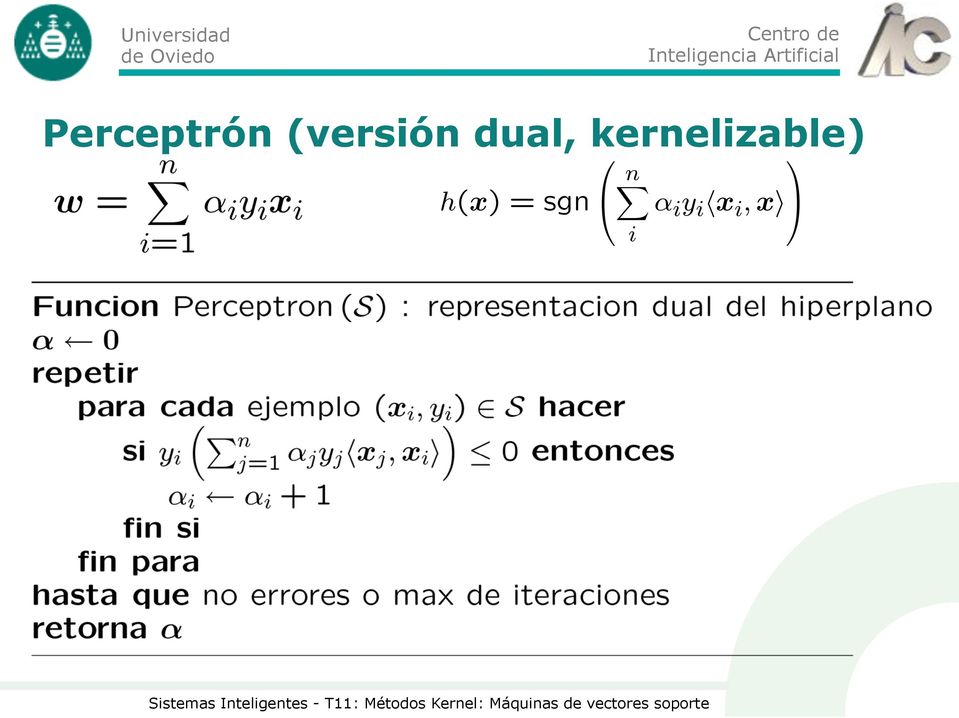
13 Perceptrón (versión sin kernels) No es kernelizable, no aparecen productos escalares

14 Perceptrón (versión dual, kernelizable)
15 El espacio de características (I)

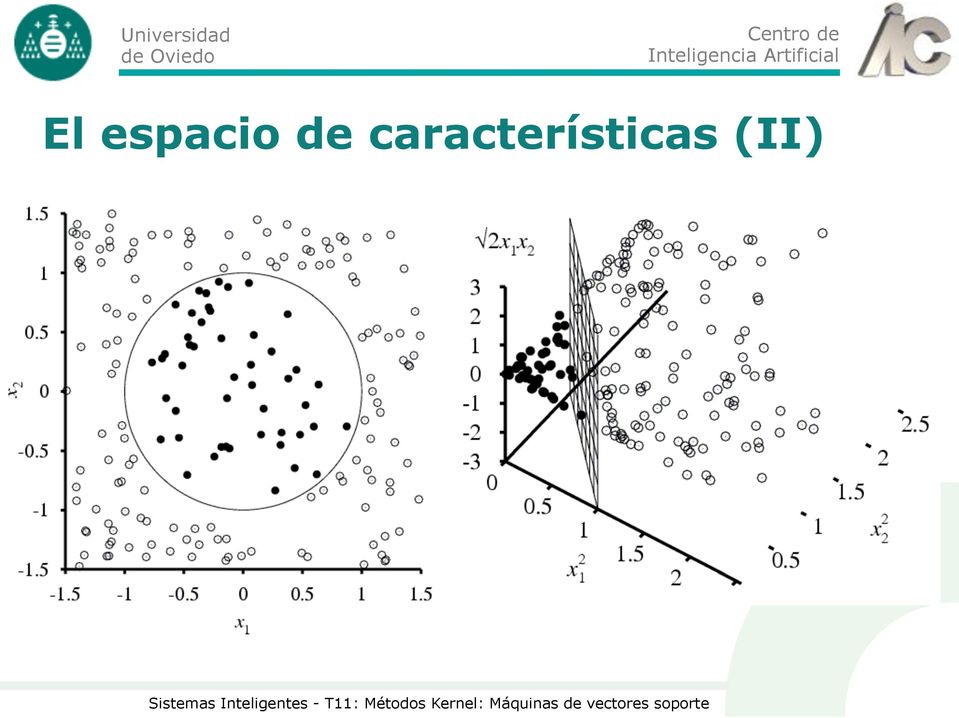
16 El espacio de características (II)
17 Ejemplo (I)

18 Ejemplo (II)

19 Máquinas de Vectores Soporte No hay nada más práctico que una buena teoría Introducidas en los 90 por Vapnik Se basan en la Minimización del Riesgo Estructural (SRM) 92: maximización del margen y uso de kernels 95: margen blando Rápido desarrollo: algoritmos más eficientes, diseño de kernels

20 General/Específico: más gráficamente Atributo 2 Específica General Atributo 1

21 Planteamiento
22 Minimización del Riesgo Estructural Minimización del Riesgo Empírico (ERM): podemos interpretarlos como sistemas que tratan de reducir el error empírico Minimización del Riesgo Estructural (SRM): estudian el riesgo estructural en el espacio de hipótesis
23 Maximización del Margen _ + + _ + _ + + +
24 Por qué maximizar el margen? Resistencia al ruido en los datos de entrada Resistencia al error en el cálculo de la función de clasificación Propiedades matemáticas que permiten acotar de manera razonable el error de generalización
25 Margen funcional y geométrico Margen funcional: la menor diferencia entre aplicar la función a los ejemplos de la clase positiva y negativa Margen geométrico: distancia entre los ejemplos de ambas clases, ed, la suma de la distancia del hiperplano al ejemplo más próximo de cada clase definen el mismo hiperplano. Para maximizar uno de ellos debemos mantener fijo el otro. Si mantenemos fijo el funcional ( ), podemos maximizar el geométrico
26 Maximizando el margen geométrico _
27 Maximizar el margen: minimizar la norma Resolviendo este problema obtendremos el hiperplano de margen geométrico máximo que clasifica correctamente todos los ejemplos. Para resolverlo aplicaremos métodos conocidos de optimización de funciones
28 Optimización de funciones Problema primal el objetivo es obtener los valores de las variables primales w que minimizan la función objetivo f. Las solución está sujeta a que dichos valores respeten las restricciones de desigualdad g i. Programación lineal: f y g i lineales Programación cuadrática: f cuadrática y g i lineales Conjunto admisible: todos los puntos del dominio que cumplen las restricciones Óptimo w*: para otro w del cjto admisible
29 Convexidad: óptimos globales (I) Def #1. Un dominio es convexo si y solo si el segmento de la recta que une cualquier par de puntos del dominio también está incluido en el dominio si el dominio es convexo, las restricciones lineales no eliminan la convexidad del cjto admisible Def #2. Una función es convexa si Def #3. Una función doblemente diferenciable es convexa si su matriz Hessiana es semidefinida positiva Def #4. Si tanto el dominio, como la función objetivo y las restricciones son convexas, entonces el problema se dice que es convexo
30 Convexidad: óptimos globales (II) Prop #1. Si una función es convexa, entonces cualquier mínimo local es también global Demostración: Para cualquier v w*, por definición de mínimo local, existirá un θ suficientemente cerca de 1 tal que, global para cualquier v y por tanto w* mínimo
31 Teoría de Lagrange: función lagrangiana Dado el problema de optimización: se define la función langragiana como donde los α i se denominan multiplicadores de Lagrange (o variables duales) y deben tener un valor no negativo. Indican la importancia de cada restricción
32 Dualidad (I) Def #5. El problema dual del problema primal planteado es: bajo ciertas condiciones, al resolver el problema dual (restricciones más simples) obtenemos también la solución del problema primal asociado.
33 Dualidad (II) Teorema. sea w una solución admisible del problema primal y α del dual, entonces W(α) f(w) El valor del problema dual está acotado superiormente por el primal Si f(w*)=w(α*) respetándose las restricciones, entonces w* y α* son, respectivamente, las soluciones del primal y dual.
34 Condiciones de Karush-Kuhn-Tucker (KKT) Teorema. Dado el problema de optimización primal planteado, si es convexo, las condiciones necesarias y suficientes para que w* sea óptimo es que exista α* tal que
35 Lectura de las condiciones KKT Los valores de las variables primales y duales que alcanzan los óptimos están relacionadas por las ecuaciones de las condiciones KKT Las derivadas parciales de la lagrangiana respecto a las variables primarias han de ser cero Condición complementaria: las restricciones activas, aquellas que valen exactamente cero, su multiplicador de Lagrange podrá ser mayor o igual que cero. Sin embargo, para las condiciones inactivas, las que valgan estrictamente menos que cero, el multiplicador asociado debe ser cero (dispersión de la solución) Estos valores han de cumplir las restricciones del primal y el dual Consecuencia (KKT). Se puede solucionar el problema primal a través de una solución del problema dual. Este punto de vista es a veces interesante cuando el problema dual es más fácil de resolver que el primal
36 Clasificación: problema primal dado que podemos cambiar esta versión directa por otra equivalente más operativa para calcular sus derivadas
37 Clasificación: lagrangiana Todas las funciones que intervienen son convexas y diferenciables. Se puede aplicar las condiciones de KKT
38 Clasificación: problema dual
39 Clasificación: análisis La solución w* es una combinación lineal de los ejemplos de entrenamiento No intervienen todos (dispersión), sólo los que tienen un multiplicador de Lagrange distinto de cero (vectores soporte) En el caso separable, los vectores soporte son los ejemplos que estén justo en el margen de cada clase (condición KKT) La variable primal b no aparece en el problema dual, se debe calcular a partir de w*
40 Clasificación: conclusiones Margen: Obtenemos la solución que, desde un punto de vista estructural, tiene menor posibilidad de cometer errores futuros Convexidad: la solución se obtiene resolviendo un programa de optimización cuadrática, convexo, sin mínimos locales y resoluble en tiempo polinomial Dualidad y kernels: el problema dual depende de productos escalares entre los ejemplos. Podremos sustituirlo por el producto escalar en un espacio de características mediante un kernel Dispersión: la solución depende de los vectores soporte
41 Margen blando: primal
42 Margen blando: lagrangiana
43 Margen blando: dual
44 Regularización Las SVMs seleccionan la función que cumple la siguiente condición: El primero sumando representa la complejidad de la hipótesis elegida, se prefiere la más simple (Ockham) El segundo sumando sirve para controlar el coste de la hipótesis elegida, medido sobre los datos de entrenamiento utilizados La constante C es la que nos permite regular la solución de compromiso entre ambos términos, complejidad y coste La determinación del valor adecuado para C en una aplicación real es quizás más difícil que decidir el kernel a emplear, ya que éste en muchos casos puede venir dado por los datos
45 Regularización (II) más bajo intermedio más alto valor de C
46 Regresión Necesitamos una función de coste para el término regularizador
47 Regresión: problema primal Necesitamos dos variables de holgura para cada ejemplo
48 Regresión: lagrangiana
49 Regresión: problema dual
50 Resumen Maximización del margen Problema de Optimización cuadrática: convexidad no hay mínimos locales resoluble en tiempo polinomial sequiential minimal optimization (smo) para cjtos grandes Dualidad: permite el uso de kernels Podemos transformar el espacio de entrada original en un espacio de mayor dimensión Dispersión: sólo son necesarios los puntos cerca del margen (vectores soporte) Las SVM se pueden emplear para: clasificación, regresión, clustering, aprendizaje de preferencias
MÁQUINA DE VECTORES DE SOPORTE
 MÁQUINA DE VECTORES DE SOPORTE La teoría de las (SVM por su nombre en inglés Support Vector Machine) fue desarrollada por Vapnik basado en la idea de minimización del riesgo estructural (SRM). Algunas
MÁQUINA DE VECTORES DE SOPORTE La teoría de las (SVM por su nombre en inglés Support Vector Machine) fue desarrollada por Vapnik basado en la idea de minimización del riesgo estructural (SRM). Algunas
Support Vector Machines
 Support Vector Machines Separadores lineales Clasificacion binaria puede ser vista como la tarea de separar clases en el espacio de caracteristicas w T x + b > 0 w T x + b = 0 w T x + b < 0 f(x) = sign(w
Support Vector Machines Separadores lineales Clasificacion binaria puede ser vista como la tarea de separar clases en el espacio de caracteristicas w T x + b > 0 w T x + b = 0 w T x + b < 0 f(x) = sign(w
MÁQUINAS DE VECTORES DE SOPORTE
 MÁQUINAS DE VECTORES DE SOPORTE Introducción Se tiene información de N individuos codificada de la forma Las variables X son vectores que reúnen información numérica del individuo, las variables Y indican
MÁQUINAS DE VECTORES DE SOPORTE Introducción Se tiene información de N individuos codificada de la forma Las variables X son vectores que reúnen información numérica del individuo, las variables Y indican
Support Vector Machine
 Juan Carlos Caicedo Juan Carlos Mendivelso Maestria en Ingenieria de Sistemas y Computacion Universidad Nacional de Colombia 20 de marzo de 2007 Agenda 1 2 3 4 Outline 1 2 3 4 Clasificador lineal que utiliza
Juan Carlos Caicedo Juan Carlos Mendivelso Maestria en Ingenieria de Sistemas y Computacion Universidad Nacional de Colombia 20 de marzo de 2007 Agenda 1 2 3 4 Outline 1 2 3 4 Clasificador lineal que utiliza
Anexo 1: Demostraciones
 75 Matemáticas I : Álgebra Lineal Anexo 1: Demostraciones Espacios vectoriales Demostración de: Propiedades 89 de la página 41 Propiedades 89- Algunas propiedades que se deducen de las anteriores son:
75 Matemáticas I : Álgebra Lineal Anexo 1: Demostraciones Espacios vectoriales Demostración de: Propiedades 89 de la página 41 Propiedades 89- Algunas propiedades que se deducen de las anteriores son:
Jesús Getán y Eva Boj. Marzo de 2014
 Optimización sin restricciones Jesús Getán y Eva Boj Facultat d Economia i Empresa Universitat de Barcelona Marzo de 2014 Jesús Getán y Eva Boj Optimización sin restricciones 1 / 32 Formulación del problema
Optimización sin restricciones Jesús Getán y Eva Boj Facultat d Economia i Empresa Universitat de Barcelona Marzo de 2014 Jesús Getán y Eva Boj Optimización sin restricciones 1 / 32 Formulación del problema
VECTORES. Módulo, dirección y sentido de un vector fijo En un vector fijo se llama módulo del mismo a la longitud del segmento que lo define.
 VECTORES El estudio de los vectores es uno de tantos conocimientos de las matemáticas que provienen de la física. En esta ciencia se distingue entre magnitudes escalares y magnitudes vectoriales. Se llaman
VECTORES El estudio de los vectores es uno de tantos conocimientos de las matemáticas que provienen de la física. En esta ciencia se distingue entre magnitudes escalares y magnitudes vectoriales. Se llaman
Optimización, Solemne 2. Semestre Otoño 2012 Profesores: Paul Bosch, Rodrigo López, Fernando Paredes, Pablo Rey Tiempo: 110 min.
 UNIVERSIDAD DIEGO PORTALES. FACULTAD DE INGENIERIA. ESCUELA DE INGENIERIA INDUSTRIAL. Optimización, Solemne. Semestre Otoño Profesores: Paul Bosch, Rodrigo López, Fernando Paredes, Pablo Rey Tiempo: min.
UNIVERSIDAD DIEGO PORTALES. FACULTAD DE INGENIERIA. ESCUELA DE INGENIERIA INDUSTRIAL. Optimización, Solemne. Semestre Otoño Profesores: Paul Bosch, Rodrigo López, Fernando Paredes, Pablo Rey Tiempo: min.
UNIVERSIDAD AUTÓNOMA DE BAJA CALIFORNIA FACULTAD DE INGENIERÍA MEXICALI
 PROGRAMA EDUCATIVO PLAN DE ESTUDIO CLAVE DE UNIDAD DE APRENDIZAJE NOMBRE DE LA UNIDAD DE APRENDIZAJE Tronco Común 2009-2 11211 Álgebra Lineal PRÁCTICA No. NOMBRE DE LA PRÁCTICA DURACIÓN (HORAS) 7 Producto
PROGRAMA EDUCATIVO PLAN DE ESTUDIO CLAVE DE UNIDAD DE APRENDIZAJE NOMBRE DE LA UNIDAD DE APRENDIZAJE Tronco Común 2009-2 11211 Álgebra Lineal PRÁCTICA No. NOMBRE DE LA PRÁCTICA DURACIÓN (HORAS) 7 Producto
UNIDAD 6. Programación no lineal
 UNIDAD 6 Programación no lineal En matemática Programación no lineal (PNL) es el proceso de resolución de un sistema de igualdades y desigualdades sujetas a un conjunto de restricciones sobre un conjunto
UNIDAD 6 Programación no lineal En matemática Programación no lineal (PNL) es el proceso de resolución de un sistema de igualdades y desigualdades sujetas a un conjunto de restricciones sobre un conjunto
1. Ecuaciones no lineales
 1. Ecuaciones no lineales 1.1 Ejercicios resueltos Ejercicio 1.1 Dada la ecuación xe x 1 = 0, se pide: a) Estudiar gráficamente sus raíces reales y acotarlas. b) Aplicar el método de la bisección y acotar
1. Ecuaciones no lineales 1.1 Ejercicios resueltos Ejercicio 1.1 Dada la ecuación xe x 1 = 0, se pide: a) Estudiar gráficamente sus raíces reales y acotarlas. b) Aplicar el método de la bisección y acotar
INTRODUCCIÓN A LA PROGRAMACIÓN MATEMÁTICA
 INTRODUCCIÓN A LA PROGRAMACIÓN MATEMÁTICA Dentro del campo general de la teoría de la optimización, también conocida como programación matemática conviene distinguir diferentes modelos de optimización.
INTRODUCCIÓN A LA PROGRAMACIÓN MATEMÁTICA Dentro del campo general de la teoría de la optimización, también conocida como programación matemática conviene distinguir diferentes modelos de optimización.
CÁLCULO PARA LA INGENIERÍA 1
 CÁLCULO PARA LA INGENIERÍA 1 PROBLEMAS RESUELTOS Tema 3 Derivación de funciones de varias variables 3.1 Derivadas y diferenciales de funciones de varias variables! 1. Derivadas parciales de primer orden.!
CÁLCULO PARA LA INGENIERÍA 1 PROBLEMAS RESUELTOS Tema 3 Derivación de funciones de varias variables 3.1 Derivadas y diferenciales de funciones de varias variables! 1. Derivadas parciales de primer orden.!
1. Números Reales 1.1 Clasificación y propiedades
 1. Números Reales 1.1 Clasificación y propiedades 1.1.1 Definición Número real, cualquier número racional o irracional. Los números reales pueden expresarse en forma decimal mediante un número entero,
1. Números Reales 1.1 Clasificación y propiedades 1.1.1 Definición Número real, cualquier número racional o irracional. Los números reales pueden expresarse en forma decimal mediante un número entero,
Definición de vectores
 Definición de vectores Un vector es todo segmento de recta dirigido en el espacio. Cada vector posee unas características que son: Origen: O también denominado Punto de aplicación. Es el punto exacto sobre
Definición de vectores Un vector es todo segmento de recta dirigido en el espacio. Cada vector posee unas características que son: Origen: O también denominado Punto de aplicación. Es el punto exacto sobre
BASES Y DIMENSIÓN. Propiedades de las bases. Ejemplos de bases.
 BASES Y DIMENSIÓN Definición: Base. Se llama base de un espacio (o subespacio) vectorial a un sistema generador de dicho espacio o subespacio, que sea a la vez linealmente independiente. β Propiedades
BASES Y DIMENSIÓN Definición: Base. Se llama base de un espacio (o subespacio) vectorial a un sistema generador de dicho espacio o subespacio, que sea a la vez linealmente independiente. β Propiedades
Subespacios vectoriales en R n
 Subespacios vectoriales en R n Víctor Domínguez Octubre 2011 1. Introducción Con estas notas resumimos los conceptos fundamentales del tema 3 que, en pocas palabras, se puede resumir en técnicas de manejo
Subespacios vectoriales en R n Víctor Domínguez Octubre 2011 1. Introducción Con estas notas resumimos los conceptos fundamentales del tema 3 que, en pocas palabras, se puede resumir en técnicas de manejo
Tema 5: Dualidad y sensibilidad de los modelos lineales.
 ema 5: Dualidad y sensibilidad de los modelos lineales. Objetivos del tema: Introducir el concepto de Sensibilidad en la Programación Lineal Introducir el concepto de Dualidad en la Programación Lineal
ema 5: Dualidad y sensibilidad de los modelos lineales. Objetivos del tema: Introducir el concepto de Sensibilidad en la Programación Lineal Introducir el concepto de Dualidad en la Programación Lineal
Aplicaciones Lineales
 Aplicaciones Lineales Concepto de aplicación lineal T : V W Definición: Si V y W son espacios vectoriales con los mismos escalares (por ejemplo, ambos espacios vectoriales reales o ambos espacios vectoriales
Aplicaciones Lineales Concepto de aplicación lineal T : V W Definición: Si V y W son espacios vectoriales con los mismos escalares (por ejemplo, ambos espacios vectoriales reales o ambos espacios vectoriales
4.3 INTERPRETACIÓN ECONÓMICA DE LA DUALIDAD
 4.3 INTERPRETACIÓN ECONÓMICA DE LA DUALIDAD El problema de programación lineal se puede considerar como modelo de asignación de recursos, en el que el objetivo es maximizar los ingresos o las utilidades,
4.3 INTERPRETACIÓN ECONÓMICA DE LA DUALIDAD El problema de programación lineal se puede considerar como modelo de asignación de recursos, en el que el objetivo es maximizar los ingresos o las utilidades,
1. Producto escalar, métrica y norma asociada
 1. asociada Consideramos el espacio vectorial R n sobre el cuerpo R; escribimos los vectores o puntos de R n, indistintamente, como x = (x 1,..., x n ) = n x i e i i=1 donde e i son los vectores de la
1. asociada Consideramos el espacio vectorial R n sobre el cuerpo R; escribimos los vectores o puntos de R n, indistintamente, como x = (x 1,..., x n ) = n x i e i i=1 donde e i son los vectores de la
euresti@itesm.mx Matemáticas
 al Método al Método Matemáticas al Método En esta lectura daremos una introducción al método desarrollado por George Bernard Dantzig (8 de noviembre de 1914-13 de mayo de 2005) en 1947. Este método se
al Método al Método Matemáticas al Método En esta lectura daremos una introducción al método desarrollado por George Bernard Dantzig (8 de noviembre de 1914-13 de mayo de 2005) en 1947. Este método se
PROBLEMA 1. 1. [1.5 puntos] Obtener la ecuación de la recta tangente en el punto ( 2, 1) a la curva dada implícitamente por y 3 +3y 2 = x 4 3x 2.
![PROBLEMA 1. 1. [1.5 puntos] Obtener la ecuación de la recta tangente en el punto ( 2, 1) a la curva dada implícitamente por y 3 +3y 2 = x 4 3x 2.](/thumbs/27/11795036.jpg "PROBLEMA 1. 1. [1.5 puntos] Obtener la ecuación de la recta tangente en el punto ( 2, 1) a la curva dada implícitamente por y 3 +3y 2 = x 4 3x 2.") PROBLEMA. ESCUELA UNIVERSITARIA POLITÉCNICA DE SEVILLA Ingeniería Técnica en Diseño Industrial Fundamentos Matemáticos de la Ingeniería Soluciones correspondientes a los problemas del Primer Parcial 7/8.
PROBLEMA. ESCUELA UNIVERSITARIA POLITÉCNICA DE SEVILLA Ingeniería Técnica en Diseño Industrial Fundamentos Matemáticos de la Ingeniería Soluciones correspondientes a los problemas del Primer Parcial 7/8.
Ejemplo: Resolvemos Sin solución. O siempre es positiva o siempre es negativa. Damos un valor cualquiera Siempre + D(f) =
 =") T1 Dominios, Límites, Asíntotas, Derivadas y Representación Gráfica. 1.1 Dominios de funciones: Polinómicas: D( = La X puede tomar cualquier valor entre Ejemplos: D( = Función racional: es el cociente
T1 Dominios, Límites, Asíntotas, Derivadas y Representación Gráfica. 1.1 Dominios de funciones: Polinómicas: D( = La X puede tomar cualquier valor entre Ejemplos: D( = Función racional: es el cociente
Estructuras algebraicas
 Tema 2 Estructuras algebraicas básicas 2.1. Operación interna Definición 29. Dados tres conjuntos A, B y C, se llama ley de composición en los conjuntos A y B y resultado en el conjunto C, y se denota
Tema 2 Estructuras algebraicas básicas 2.1. Operación interna Definición 29. Dados tres conjuntos A, B y C, se llama ley de composición en los conjuntos A y B y resultado en el conjunto C, y se denota
Tema 3. Espacios vectoriales
 Tema 3. Espacios vectoriales Estructura del tema. Definición y propiedades. Ejemplos. Dependencia e independencia lineal. Conceptos de base y dimensión. Coordenadas Subespacios vectoriales. 0.1. Definición
Tema 3. Espacios vectoriales Estructura del tema. Definición y propiedades. Ejemplos. Dependencia e independencia lineal. Conceptos de base y dimensión. Coordenadas Subespacios vectoriales. 0.1. Definición
Análisis de componentes principales
 Capítulo 2 Análisis de componentes principales 2.1. INTRODUCCIÓN El Análisis de componentes principales trata de describir las características principales de un conjunto de datos multivariantes, en los
Capítulo 2 Análisis de componentes principales 2.1. INTRODUCCIÓN El Análisis de componentes principales trata de describir las características principales de un conjunto de datos multivariantes, en los
Números Reales DESIGUALDADES DESIGUALDADES. Solución de desigualdades. 2x + 4 < 6x +1 6x + 3 8x 7 x 2 > 3x 2 5x + 8. INECUACIONES o DESIGUALDADES
 Números Reales INECUACIONES o DESIGUALDADES DESIGUALDADES Una desigualdad en una variable es una expresión donde se establece una relación entre dos cantidades. Las relaciones de orden son: ,, Ejemplos:
Números Reales INECUACIONES o DESIGUALDADES DESIGUALDADES Una desigualdad en una variable es una expresión donde se establece una relación entre dos cantidades. Las relaciones de orden son: ,, Ejemplos:
Tema 2. Espacios Vectoriales. 2.1. Introducción
 Tema 2 Espacios Vectoriales 2.1. Introducción Estamos habituados en diferentes cursos a trabajar con el concepto de vector. Concretamente sabemos que un vector es un segmento orientado caracterizado por
Tema 2 Espacios Vectoriales 2.1. Introducción Estamos habituados en diferentes cursos a trabajar con el concepto de vector. Concretamente sabemos que un vector es un segmento orientado caracterizado por
Aula Banca Privada. La importancia de la diversificación
 Aula Banca Privada La importancia de la diversificación La importancia de la diversificación La diversificación de carteras es el principio básico de la operativa en mercados financieros, según el cual
Aula Banca Privada La importancia de la diversificación La importancia de la diversificación La diversificación de carteras es el principio básico de la operativa en mercados financieros, según el cual
Análisis de medidas conjuntas (conjoint analysis)
") Análisis de medidas conuntas (conoint analysis). Introducción Como ya hemos dicho anteriormente, esta técnica de análisis nos sirve para analizar la importancia que dan los consumidores a cada uno de los
Análisis de medidas conuntas (conoint analysis). Introducción Como ya hemos dicho anteriormente, esta técnica de análisis nos sirve para analizar la importancia que dan los consumidores a cada uno de los
_ Antología de Física I. Unidad II Vectores. Elaboró: Ing. Víctor H. Alcalá-Octaviano
 24 Unidad II Vectores 2.1 Magnitudes escalares y vectoriales Unidad II. VECTORES Para muchas magnitudes físicas basta con indicar su valor para que estén perfectamente definidas y estas son las denominadas
24 Unidad II Vectores 2.1 Magnitudes escalares y vectoriales Unidad II. VECTORES Para muchas magnitudes físicas basta con indicar su valor para que estén perfectamente definidas y estas son las denominadas
Espacios Vectoriales
 Espacios Vectoriales Departamento de Matemáticas, CCIR/ITESM 4 de enero de 2 Índice 3.. Objetivos................................................ 3.2. Motivación...............................................
Espacios Vectoriales Departamento de Matemáticas, CCIR/ITESM 4 de enero de 2 Índice 3.. Objetivos................................................ 3.2. Motivación...............................................
MATEMÁTICAS II APUNTES DE TEORÍA CURSO ACADÉMICO 2012-13. Carlos Ivorra
 MATEMÁTICAS II APUNTES DE TEORÍA CURSO ACADÉMICO 2012-13 Carlos Ivorra Índice 1 Introducción a la optimización 1 2 Programación entera 18 3 Introducción a la programación lineal 24 4 El método símplex
MATEMÁTICAS II APUNTES DE TEORÍA CURSO ACADÉMICO 2012-13 Carlos Ivorra Índice 1 Introducción a la optimización 1 2 Programación entera 18 3 Introducción a la programación lineal 24 4 El método símplex
1. Breve resumen de optimización sin restricciones en varias variables.
 MATEMÁTICAS EMPRESARIALES G.A.D.E. CURSO 202/203 Práctica 2: Aplicaciones a la Optimización. En esta práctica se introducen las herramientas que nos ofrece el programa Mathematica para optimizar funciones
MATEMÁTICAS EMPRESARIALES G.A.D.E. CURSO 202/203 Práctica 2: Aplicaciones a la Optimización. En esta práctica se introducen las herramientas que nos ofrece el programa Mathematica para optimizar funciones
a < b y se lee "a es menor que b" (desigualdad estricta) a > b y se lee "a es mayor que b" (desigualdad estricta)
 a > b y se lee a es mayor que b (desigualdad estricta)") Desigualdades Dadas dos rectas que se cortan, llamadas ejes (rectangulares si son perpendiculares, y oblicuos en caso contrario), un punto puede situarse conociendo las distancias del mismo a los ejes,
Desigualdades Dadas dos rectas que se cortan, llamadas ejes (rectangulares si son perpendiculares, y oblicuos en caso contrario), un punto puede situarse conociendo las distancias del mismo a los ejes,
Matemáticas I: Hoja 3 Espacios vectoriales y subespacios vectoriales
 Matemáticas I: Hoa 3 Espacios vectoriales y subespacios vectoriales Eercicio 1. Demostrar que los vectores v 1, v 2, v 3, v 4 expresados en la base canónica forman una base. Dar las coordenadas del vector
Matemáticas I: Hoa 3 Espacios vectoriales y subespacios vectoriales Eercicio 1. Demostrar que los vectores v 1, v 2, v 3, v 4 expresados en la base canónica forman una base. Dar las coordenadas del vector
Ingeniería en Informática
 Departamento de Informática Universidad Carlos III de Madrid Ingeniería en Informática Aprendizaje Automático Junio 2007 Normas generales del examen El tiempo para realizar el examen es de 3 horas No se
Departamento de Informática Universidad Carlos III de Madrid Ingeniería en Informática Aprendizaje Automático Junio 2007 Normas generales del examen El tiempo para realizar el examen es de 3 horas No se
ORGANIZACIÓN INDUSTRIAL (16691-ECO) PARTE II: MODELOS DE COMPETENCIA IMPERFECTA TEMA 2: EL MONOPOLIO SOLUCIÓN A LOS PROBLEMAS PROPUESTOS
 PARTE II: MODELOS DE COMPETENCIA IMPERFECTA TEMA 2: EL MONOPOLIO SOLUCIÓN A LOS PROBLEMAS PROPUESTOS") ORGANIZACIÓN INDUSTRIAL (16691-ECO) PARTE II: MODELOS DE COMPETENCIA IMPERFECTA TEMA 2: EL MONOPOLIO 2.1 ANÁLISIS DE EQUILIBRIO 2.2. DISCRIMINACIÓN DE PRECIOS Y REGULACIÓN SOLUCIÓN A LOS PROBLEMAS PROPUESTOS
ORGANIZACIÓN INDUSTRIAL (16691-ECO) PARTE II: MODELOS DE COMPETENCIA IMPERFECTA TEMA 2: EL MONOPOLIO 2.1 ANÁLISIS DE EQUILIBRIO 2.2. DISCRIMINACIÓN DE PRECIOS Y REGULACIÓN SOLUCIÓN A LOS PROBLEMAS PROPUESTOS
Covarianza y coeficiente de correlación
 Covarianza y coeficiente de correlación Cuando analizábamos las variables unidimensionales considerábamos, entre otras medidas importantes, la media y la varianza. Ahora hemos visto que estas medidas también
Covarianza y coeficiente de correlación Cuando analizábamos las variables unidimensionales considerábamos, entre otras medidas importantes, la media y la varianza. Ahora hemos visto que estas medidas también
OPTIMIZACIÓN ESCALAR. María Jesús de la Fuente Aparicio Dpto. Ingeniería de Sistemas y Automática
 OPTIMIZACIÓN ESCALAR María Jesús de la Fuente Aparicio Dpto. Ingeniería de Sistemas y Automática CONCEPTOS BÁSICOS DEFINICIONES Definiciones Optimo local (mínimo local) Un punto * F se denomina un mínimo
OPTIMIZACIÓN ESCALAR María Jesús de la Fuente Aparicio Dpto. Ingeniería de Sistemas y Automática CONCEPTOS BÁSICOS DEFINICIONES Definiciones Optimo local (mínimo local) Un punto * F se denomina un mínimo
Tema 1. VECTORES (EN EL PLANO Y EN EL ESPACIO)
") Vectores Tema. VECTORES (EN EL PLANO Y EN EL ESPACIO Definición de espacio vectorial Un conjunto E es un espacio vectorial si en él se definen dos operaciones, una interna (suma y otra externa (producto
Vectores Tema. VECTORES (EN EL PLANO Y EN EL ESPACIO Definición de espacio vectorial Un conjunto E es un espacio vectorial si en él se definen dos operaciones, una interna (suma y otra externa (producto
Ecuaciones de primer grado con dos incógnitas
 Ecuaciones de primer grado con dos incógnitas Si decimos: "las edades de mis padres suman 120 años", podemos expresar esta frase algebraicamente de la siguiente forma: Entonces, Denominamos x a la edad
Ecuaciones de primer grado con dos incógnitas Si decimos: "las edades de mis padres suman 120 años", podemos expresar esta frase algebraicamente de la siguiente forma: Entonces, Denominamos x a la edad
Geometría Tridimensional
 Capítulo 4 Geometría Tridimensional En dos dimensiones trabajamos en el plano mientras que en tres dimensiones trabajaremos en el espacio, también provisto de un sistema de coordenadas. En el espacio,
Capítulo 4 Geometría Tridimensional En dos dimensiones trabajamos en el plano mientras que en tres dimensiones trabajaremos en el espacio, también provisto de un sistema de coordenadas. En el espacio,
DIRECTRICES Y ORIENTACIONES GENERALES PARA LAS PRUEBAS DE ACCESO A LA UNIVERSIDAD
 Curso Asignatura 2014/2015 MATEMÁTICAS II 1º Comentarios acerca del programa del segundo curso del Bachillerato, en relación con la Prueba de Acceso a la Universidad La siguiente relación de objetivos,
Curso Asignatura 2014/2015 MATEMÁTICAS II 1º Comentarios acerca del programa del segundo curso del Bachillerato, en relación con la Prueba de Acceso a la Universidad La siguiente relación de objetivos,
Matemáticas. Si un error simple ha llevado a un problema más sencillo se disminuirá la puntuación.
 UNIVERSIDAD POLITÉCNICA DE CARTAGENA PRUEBAS DE ACCESO A LA UNIVERSIDAD DE LOS MAYORES DE 25 AÑOS CONVOCATORIA 2014 CRITERIOS DE EVALUACIÓN Matemáticas GENERALES: El examen constará de dos opciones (dos
UNIVERSIDAD POLITÉCNICA DE CARTAGENA PRUEBAS DE ACCESO A LA UNIVERSIDAD DE LOS MAYORES DE 25 AÑOS CONVOCATORIA 2014 CRITERIOS DE EVALUACIÓN Matemáticas GENERALES: El examen constará de dos opciones (dos
Métodos Iterativos para Resolver Sistemas Lineales
 Métodos Iterativos para Resolver Sistemas Lineales Departamento de Matemáticas, CCIR/ITESM 17 de julio de 2009 Índice 3.1. Introducción............................................... 1 3.2. Objetivos................................................
Métodos Iterativos para Resolver Sistemas Lineales Departamento de Matemáticas, CCIR/ITESM 17 de julio de 2009 Índice 3.1. Introducción............................................... 1 3.2. Objetivos................................................
DOMINIO Y RANGO página 89. Cuando se grafica una función existen las siguientes posibilidades:
 DOMINIO Y RANGO página 89 3. CONCEPTOS Y DEFINICIONES Cuando se grafica una función eisten las siguientes posibilidades: a) Que la gráfica ocupe todo el plano horizontalmente (sobre el eje de las ). b)
DOMINIO Y RANGO página 89 3. CONCEPTOS Y DEFINICIONES Cuando se grafica una función eisten las siguientes posibilidades: a) Que la gráfica ocupe todo el plano horizontalmente (sobre el eje de las ). b)
4º ESO 1. ECUAC. 2º GRADO Y UNA INCÓGNITA
 4º ESO 1. ECUAC. 2º GRADO Y UNA INCÓGNITA Una ecuación con una incógnita es de segundo grado si el exponente de la incógnita es dos. Ecuaciones de segundo grado con una incógnita son: Esta última ecuación
4º ESO 1. ECUAC. 2º GRADO Y UNA INCÓGNITA Una ecuación con una incógnita es de segundo grado si el exponente de la incógnita es dos. Ecuaciones de segundo grado con una incógnita son: Esta última ecuación
Definición 1.1.1. Dados dos números naturales m y n, una matriz de orden o dimensión m n es una tabla numérica rectangular con m filas y n columnas.
 Tema 1 Matrices Estructura del tema. Conceptos básicos y ejemplos Operaciones básicas con matrices Método de Gauss Rango de una matriz Concepto de matriz regular y propiedades Determinante asociado a una
Tema 1 Matrices Estructura del tema. Conceptos básicos y ejemplos Operaciones básicas con matrices Método de Gauss Rango de una matriz Concepto de matriz regular y propiedades Determinante asociado a una
MICROECONOMÍA II PRÁCTICA TEMA III: MONOPOLIO
 MICROECONOMÍA II PRÁCTICA TEMA III: MONOPOLIO EJERCICIO 1 Primero analizamos el equilibrio bajo el monopolio. El monopolista escoge la cantidad que maximiza sus beneficios; en particular, escoge la cantidad
MICROECONOMÍA II PRÁCTICA TEMA III: MONOPOLIO EJERCICIO 1 Primero analizamos el equilibrio bajo el monopolio. El monopolista escoge la cantidad que maximiza sus beneficios; en particular, escoge la cantidad
Práctica 11 SVM. Máquinas de Vectores Soporte
 Práctica 11 SVM Máquinas de Vectores Soporte Dedicaremos esta práctica a estudiar el funcionamiento de las, tan de moda, máquinas de vectores soporte (SVM). 1 Las máquinas de vectores soporte Las SVM han
Práctica 11 SVM Máquinas de Vectores Soporte Dedicaremos esta práctica a estudiar el funcionamiento de las, tan de moda, máquinas de vectores soporte (SVM). 1 Las máquinas de vectores soporte Las SVM han
Clasificación de métricas.
 Clasificación de métricas. 1. El problema de clasificación. Como bien sabemos, el par formado por una métrica T 2 (esto es, un tensor 2-covariante simétrico) sobre un espacio vectorial E, (E, T 2 ), constituye
Clasificación de métricas. 1. El problema de clasificación. Como bien sabemos, el par formado por una métrica T 2 (esto es, un tensor 2-covariante simétrico) sobre un espacio vectorial E, (E, T 2 ), constituye
SVM: Máquinas de Vectores Soporte. Carlos Alonso González Grupo de Sistemas Inteligentes Departamento de Informática Universidad de Valladolid
 SVM: Máquinas de Vectores Soporte Carlos Alonso González Grupo de Sistemas Inteligentes Departamento de Informática Universidad de Valladolid Contenido 1. Clasificación lineal con modelos lineales 2. Regresión
SVM: Máquinas de Vectores Soporte Carlos Alonso González Grupo de Sistemas Inteligentes Departamento de Informática Universidad de Valladolid Contenido 1. Clasificación lineal con modelos lineales 2. Regresión
Ejercicios de Programación Lineal
 Ejercicios de Programación Lineal Investigación Operativa Ingeniería Informática, UCM Curso 8/9 Una compañía de transporte dispone de camiones con capacidad de 4 libras y de 5 camiones con capacidad de
Ejercicios de Programación Lineal Investigación Operativa Ingeniería Informática, UCM Curso 8/9 Una compañía de transporte dispone de camiones con capacidad de 4 libras y de 5 camiones con capacidad de
MATEMÁTICAS EMPRESARIALES II:
 MATEMÁTICAS EMPRESARIALES II: FUNCIÓN REAL DE VARIAS VARIABLES ÓPTIMOS DE UNA FUNCIÓN ESCALAR MATERIAL DIDÁCTICO DE SOPORTE González-Vila Puchades, Laura Ortí Celma, Francesc J. Sáez Madrid, José B. Departament
MATEMÁTICAS EMPRESARIALES II: FUNCIÓN REAL DE VARIAS VARIABLES ÓPTIMOS DE UNA FUNCIÓN ESCALAR MATERIAL DIDÁCTICO DE SOPORTE González-Vila Puchades, Laura Ortí Celma, Francesc J. Sáez Madrid, José B. Departament
Características de funciones que son inversas de otras
 Características de funciones que son inversas de otras Si f es una función inyectiva, llamamos función inversa de f y se representa por f 1 al conjunto. f 1 = a, b b, a f} Es decir, f 1 (x, y) = { x =
Características de funciones que son inversas de otras Si f es una función inyectiva, llamamos función inversa de f y se representa por f 1 al conjunto. f 1 = a, b b, a f} Es decir, f 1 (x, y) = { x =
Ejemplo del modelo de generaciones solapadas
 Ejemplo del modelo de generaciones solapadas Descripción de la economía 1. Cada unidad del bien sólo puede existir en un período de tiempo. 2. Todas las generaciones 1 son idénticas. Cada generación está
Ejemplo del modelo de generaciones solapadas Descripción de la economía 1. Cada unidad del bien sólo puede existir en un período de tiempo. 2. Todas las generaciones 1 son idénticas. Cada generación está
2) Se ha considerado únicamente la mano de obra, teniéndose en cuenta las horas utilizadas en cada actividad por unidad de página.
 Se ha considerado únicamente la mano de obra, teniéndose en cuenta las horas utilizadas en cada actividad por unidad de página.") APLICACIÓN AL PROCESO PRODUCTIVO DE LA EMPRESA "F. G. / DISEÑO GRÁFICO". AÑO 2004 Rescala, Carmen Según lo explicado en el Informe del presente trabajo, la variación en la producción de páginas web de
APLICACIÓN AL PROCESO PRODUCTIVO DE LA EMPRESA "F. G. / DISEÑO GRÁFICO". AÑO 2004 Rescala, Carmen Según lo explicado en el Informe del presente trabajo, la variación en la producción de páginas web de
Apoyo para la preparación de los estudios de Ingeniería y Arquitectura Física (Preparación a la Universidad) Unidad 4: Vectores
 Unidad 4: Vectores") Apoyo para la preparación de los estudios de Ingeniería y Arquitectura Física (Preparación a la Universidad) Unidad 4: Vectores Universidad Politécnica de Madrid 5 de marzo de 2010 2 4.1. Planificación
Apoyo para la preparación de los estudios de Ingeniería y Arquitectura Física (Preparación a la Universidad) Unidad 4: Vectores Universidad Politécnica de Madrid 5 de marzo de 2010 2 4.1. Planificación
Sistemas de ecuaciones lineales
 Sistemas de ecuaciones lineales Índice general 1. Sistemas de ecuaciones lineales 2 2. Método de sustitución 5 3. Método de igualación 9 4. Método de eliminación 13 5. Conclusión 16 1 Sistemas de ecuaciones
Sistemas de ecuaciones lineales Índice general 1. Sistemas de ecuaciones lineales 2 2. Método de sustitución 5 3. Método de igualación 9 4. Método de eliminación 13 5. Conclusión 16 1 Sistemas de ecuaciones
1 Espacios y subespacios vectoriales.
 UNIVERSIDAD POLITÉCNICA DE CARTAGENA Departamento de Matemática Aplicada y Estadística Espacios vectoriales y sistemas de ecuaciones 1 Espacios y subespacios vectoriales Definición 1 Sea V un conjunto
UNIVERSIDAD POLITÉCNICA DE CARTAGENA Departamento de Matemática Aplicada y Estadística Espacios vectoriales y sistemas de ecuaciones 1 Espacios y subespacios vectoriales Definición 1 Sea V un conjunto
(A) Primer parcial. si 1 x 1; x 3 si x>1. (B) Segundo parcial
 Primer parcial. si 1 x 1; x 3 si x>1. (B) Segundo parcial") CÁLCULO DIFERENCIAL E INTEGRAL I EVALUACIÓN GLOBAL E700 1) x 5 > 1. A) Primer parcial ) Sean las funciones ft) t +,gy) y 4&hw) w. Encontrar f/h, g f, f g y sus dominios. ) Graficar la función x + six
CÁLCULO DIFERENCIAL E INTEGRAL I EVALUACIÓN GLOBAL E700 1) x 5 > 1. A) Primer parcial ) Sean las funciones ft) t +,gy) y 4&hw) w. Encontrar f/h, g f, f g y sus dominios. ) Graficar la función x + six
Ecuaciones Diferenciales Tema 2. Trasformada de Laplace
 Ecuaciones Diferenciales Tema 2. Trasformada de Laplace Ester Simó Mezquita Matemática Aplicada IV 1 1. Transformada de Laplace de una función admisible 2. Propiedades básicas de la transformada de Laplace
Ecuaciones Diferenciales Tema 2. Trasformada de Laplace Ester Simó Mezquita Matemática Aplicada IV 1 1. Transformada de Laplace de una función admisible 2. Propiedades básicas de la transformada de Laplace
BREVE MANUAL DE SOLVER
 BREVE MANUAL DE SOLVER PROFESOR: DAVID LAHOZ ARNEDO PROGRAMACIÓN LINEAL Definición: Un problema se define de programación lineal si se busca calcular el máximo o el mínimo de una función lineal, la relación
BREVE MANUAL DE SOLVER PROFESOR: DAVID LAHOZ ARNEDO PROGRAMACIÓN LINEAL Definición: Un problema se define de programación lineal si se busca calcular el máximo o el mínimo de una función lineal, la relación
Vectores: Producto escalar y vectorial
 Nivelación de Matemática MTHA UNLP 1 Vectores: Producto escalar y vectorial Versores fundamentales Dado un sistema de coordenadas ortogonales, se considera sobre cada uno de los ejes y coincidiendo con
Nivelación de Matemática MTHA UNLP 1 Vectores: Producto escalar y vectorial Versores fundamentales Dado un sistema de coordenadas ortogonales, se considera sobre cada uno de los ejes y coincidiendo con
Muchas veces hemos visto un juego de billar y no nos percatamos de los movimientos de las bolas (ver gráfico 8). Gráfico 8
. Gráfico 8") Esta semana estudiaremos la definición de vectores y su aplicabilidad a muchas situaciones, particularmente a las relacionadas con el movimiento. Por otro lado, se podrán establecer las características
Esta semana estudiaremos la definición de vectores y su aplicabilidad a muchas situaciones, particularmente a las relacionadas con el movimiento. Por otro lado, se podrán establecer las características
8.1. Introducción... 1. 8.2. Dependencia/independencia estadística... 2. 8.3. Representación gráfica: diagrama de dispersión... 3. 8.4. Regresión...
 Tema 8 Análisis de dos variables: dependencia estadística y regresión Contenido 8.1. Introducción............................. 1 8.2. Dependencia/independencia estadística.............. 2 8.3. Representación
Tema 8 Análisis de dos variables: dependencia estadística y regresión Contenido 8.1. Introducción............................. 1 8.2. Dependencia/independencia estadística.............. 2 8.3. Representación
VECTORES EN EL PLANO
 VECTORES EN EL PLANO VECTOR: vectores libres Segmento orientado, con un origen y extremo. Módulo: es la longitud del segmento orientado, es un número positivo y su símbolo es a Dirección: es la recta que
VECTORES EN EL PLANO VECTOR: vectores libres Segmento orientado, con un origen y extremo. Módulo: es la longitud del segmento orientado, es un número positivo y su símbolo es a Dirección: es la recta que
Espacios generados, dependencia lineal y bases
 Espacios generados dependencia lineal y bases Departamento de Matemáticas CCIR/ITESM 14 de enero de 2011 Índice 14.1. Introducción............................................... 1 14.2. Espacio Generado............................................
Espacios generados dependencia lineal y bases Departamento de Matemáticas CCIR/ITESM 14 de enero de 2011 Índice 14.1. Introducción............................................... 1 14.2. Espacio Generado............................................
Matemáticas 2º BTO Aplicadas a las Ciencias Sociales
 Matemáticas 2º BTO Aplicadas a las Ciencias Sociales CONVOCATORIA EXTRAORDINARIA DE JUNIO 2014 MÍNIMOS: No son contenidos mínimos los señalados como de ampliación. I. PROBABILIDAD Y ESTADÍSTICA UNIDAD
Matemáticas 2º BTO Aplicadas a las Ciencias Sociales CONVOCATORIA EXTRAORDINARIA DE JUNIO 2014 MÍNIMOS: No son contenidos mínimos los señalados como de ampliación. I. PROBABILIDAD Y ESTADÍSTICA UNIDAD
FUNCIONES CUADRÁTICAS Y RACIONALES
 www.matesronda.net José A. Jiménez Nieto FUNCIONES CUADRÁTICAS Y RACIONALES 1. FUNCIONES CUADRÁTICAS. Representemos, en función de la longitud de la base (), el área (y) de todos los rectángulos de perímetro
www.matesronda.net José A. Jiménez Nieto FUNCIONES CUADRÁTICAS Y RACIONALES 1. FUNCIONES CUADRÁTICAS. Representemos, en función de la longitud de la base (), el área (y) de todos los rectángulos de perímetro
VECTORES. Abel Moreno Lorente. February 3, 2015
 VECTORES Abel Moreno Lorente February 3, 015 1 Aspectos grácos. 1.1 Deniciones. Un vector entre dos puntos A y B es el segmento de recta orientado que tiene su origen en A y su extremo en B. A este vector
VECTORES Abel Moreno Lorente February 3, 015 1 Aspectos grácos. 1.1 Deniciones. Un vector entre dos puntos A y B es el segmento de recta orientado que tiene su origen en A y su extremo en B. A este vector
Módulo 9 Sistema matemático y operaciones binarias
 Módulo 9 Sistema matemático y operaciones binarias OBJETIVO: Identificar los conjuntos de números naturales, enteros, racionales e irracionales; resolver una operación binaria, representar un número racional
Módulo 9 Sistema matemático y operaciones binarias OBJETIVO: Identificar los conjuntos de números naturales, enteros, racionales e irracionales; resolver una operación binaria, representar un número racional
Tema 2 Límites de Funciones
 Tema 2 Límites de Funciones 2.1.- Definición de Límite Idea de límite de una función en un punto: Sea la función. Si x tiende a 2, a qué valor se aproxima? Construyendo - + una tabla de valores próximos
Tema 2 Límites de Funciones 2.1.- Definición de Límite Idea de límite de una función en un punto: Sea la función. Si x tiende a 2, a qué valor se aproxima? Construyendo - + una tabla de valores próximos
Unidad III: Programación no lineal
 Unidad III: Programación no lineal 3.1 Conceptos básicos de problemas de programación no lineal Programación no lineal (PNL) es el proceso de resolución de un sistema de igualdades y desigualdades sujetas
Unidad III: Programación no lineal 3.1 Conceptos básicos de problemas de programación no lineal Programación no lineal (PNL) es el proceso de resolución de un sistema de igualdades y desigualdades sujetas
Examen de Matemáticas 2 o de Bachillerato Mayo 2003
 Examen de Matemáticas o de Bachillerato Mayo 00 1. Expresar el número 60 como suma de tres enteros positivos de forma que el segundo sea el doble del primero y su producto sea máximo. Determinar el valor
Examen de Matemáticas o de Bachillerato Mayo 00 1. Expresar el número 60 como suma de tres enteros positivos de forma que el segundo sea el doble del primero y su producto sea máximo. Determinar el valor
PROGRAMACIÓN LINEAL. 8.1. Introducción. 8.2. Inecuaciones lineales con 2 variables
 Capítulo 8 PROGRAMACIÓN LINEAL 8.1. Introducción La programación lineal es una técnica matemática relativamente reciente (siglo XX), que consiste en una serie de métodos y procedimientos que permiten resolver
Capítulo 8 PROGRAMACIÓN LINEAL 8.1. Introducción La programación lineal es una técnica matemática relativamente reciente (siglo XX), que consiste en una serie de métodos y procedimientos que permiten resolver
APUNTES DE MATEMÁTICAS TEMA 4: VECTORES 1º BACHILLERATO
 APUNTES DE MATEMÁTICAS TEMA 4: VECTORES 1º BACHILLERATO ÍNDICE VECTORES EN EL PLANO... 3 Vector Fijo... 3 VECTOR LIBRE... 3 Operaciones con Vectores... 3 Suma de vectores... 3 Producto de un número por
APUNTES DE MATEMÁTICAS TEMA 4: VECTORES 1º BACHILLERATO ÍNDICE VECTORES EN EL PLANO... 3 Vector Fijo... 3 VECTOR LIBRE... 3 Operaciones con Vectores... 3 Suma de vectores... 3 Producto de un número por
Este documento ha sido generado para facilitar la impresión de los contenidos. Los enlaces a otras páginas no serán funcionales.
 Este documento ha sido generado para facilitar la impresión de los contenidos. Los enlaces a otras páginas no serán funcionales. Introducción Por qué La Geometría? La Geometría tiene como objetivo fundamental
Este documento ha sido generado para facilitar la impresión de los contenidos. Los enlaces a otras páginas no serán funcionales. Introducción Por qué La Geometría? La Geometría tiene como objetivo fundamental
Matrices Invertibles y Elementos de Álgebra Matricial
 Matrices Invertibles y Elementos de Álgebra Matricial Departamento de Matemáticas, CCIR/ITESM 12 de enero de 2011 Índice 91 Introducción 1 92 Transpuesta 1 93 Propiedades de la transpuesta 2 94 Matrices
Matrices Invertibles y Elementos de Álgebra Matricial Departamento de Matemáticas, CCIR/ITESM 12 de enero de 2011 Índice 91 Introducción 1 92 Transpuesta 1 93 Propiedades de la transpuesta 2 94 Matrices
Matrices equivalentes. El método de Gauss
 Matrices equivalentes. El método de Gauss Dada una matriz A cualquiera decimos que B es equivalente a A si podemos transformar A en B mediante una combinación de las siguientes operaciones: Multiplicar
Matrices equivalentes. El método de Gauss Dada una matriz A cualquiera decimos que B es equivalente a A si podemos transformar A en B mediante una combinación de las siguientes operaciones: Multiplicar
Clase 15 Espacios vectoriales Álgebra Lineal
 Espacios vectoriales Clase 5 Espacios vectoriales Álgebra Lineal Código Escuela de Matemáticas - Facultad de Ciencias Universidad Nacional de Colombia En esta sección estudiaremos uno de los conceptos
Espacios vectoriales Clase 5 Espacios vectoriales Álgebra Lineal Código Escuela de Matemáticas - Facultad de Ciencias Universidad Nacional de Colombia En esta sección estudiaremos uno de los conceptos
Funciones más usuales 1
 Funciones más usuales 1 1. La función constante Funciones más usuales La función constante Consideremos la función más sencilla, por ejemplo. La imagen de cualquier número es siempre 2. Si hacemos una
Funciones más usuales 1 1. La función constante Funciones más usuales La función constante Consideremos la función más sencilla, por ejemplo. La imagen de cualquier número es siempre 2. Si hacemos una
Formas bilineales y cuadráticas.
 Tema 4 Formas bilineales y cuadráticas. 4.1. Introducción. Conocidas las nociones de espacio vectorial, aplicación lineal, matriz de una aplicación lineal y diagonalización, estudiaremos en este tema dos
Tema 4 Formas bilineales y cuadráticas. 4.1. Introducción. Conocidas las nociones de espacio vectorial, aplicación lineal, matriz de una aplicación lineal y diagonalización, estudiaremos en este tema dos
CURSO CERO. Departamento de Matemáticas. Profesor: Raúl Martín Martín Sesiones 18 y 19 de Septiembre
 CURSO CERO Departamento de Matemáticas Profesor: Raúl Martín Martín Sesiones 18 y 19 de Septiembre Capítulo 1 La demostración matemática Demostración por inducción El razonamiento por inducción es una
CURSO CERO Departamento de Matemáticas Profesor: Raúl Martín Martín Sesiones 18 y 19 de Septiembre Capítulo 1 La demostración matemática Demostración por inducción El razonamiento por inducción es una
Unidad 6 Cálculo de máximos y mínimos
 Unidad 6 Cálculo de máimos y mínimos Objetivos Al terminar la unidad, el alumno: Utilizará la derivada para decidir cuándo una función es creciente o decreciente. Usará la derivada para calcular los etremos
Unidad 6 Cálculo de máimos y mínimos Objetivos Al terminar la unidad, el alumno: Utilizará la derivada para decidir cuándo una función es creciente o decreciente. Usará la derivada para calcular los etremos
1. Teorema del Valor Medio
 1. l Valor Medio Uno de los teoremas más importantes del cálculo diferencial de funciones reales de una variable real es el l Valor Medio, del que se obtienen consecuencias como el Taylor y el estudio
1. l Valor Medio Uno de los teoremas más importantes del cálculo diferencial de funciones reales de una variable real es el l Valor Medio, del que se obtienen consecuencias como el Taylor y el estudio
1 v 1 v 2. = u 1v 1 + u 2 v 2 +... u n v n. v n. y v = u u = u 2 1 + u2 2 + + u2 n.
 Ortogonalidad Producto interior Longitud y ortogonalidad Definición Sean u y v vectores de R n Se define el producto escalar o producto interior) de u y v como u v = u T v = u, u,, u n ) Ejemplo Calcular
Ortogonalidad Producto interior Longitud y ortogonalidad Definición Sean u y v vectores de R n Se define el producto escalar o producto interior) de u y v como u v = u T v = u, u,, u n ) Ejemplo Calcular
Problema de Programación Lineal
 Problema de Programación Lineal Introducción La optimización es un enfoque que busca la mejor solución a un problema. Propósito: Maximizar o minimizar una función objetivo que mide la calidad de la solución,
Problema de Programación Lineal Introducción La optimización es un enfoque que busca la mejor solución a un problema. Propósito: Maximizar o minimizar una función objetivo que mide la calidad de la solución,
ETSIINGENIO 2009 DIBUJO DE GRAFOS MEDIANTE ALGORITMOS GENÉTICOS
 ETSIINGENIO 2009 DIBUJO DE GRAFOS MEDIANTE ALGORITMOS GENÉTICOS EtsiIngenio Inteligencia Artificial 1 Raposo López Alejandro Sánchez Palacios Manuel Resumen dibujo de grafos mediante algoritmos genéticos
ETSIINGENIO 2009 DIBUJO DE GRAFOS MEDIANTE ALGORITMOS GENÉTICOS EtsiIngenio Inteligencia Artificial 1 Raposo López Alejandro Sánchez Palacios Manuel Resumen dibujo de grafos mediante algoritmos genéticos
Listas de vectores y conjuntos de vectores
 Listas de vectores y conjuntos de vectores La explicación de los temas Dependencia lineal y Bases en el curso de Álgebra Lineal se puede basar en uno de los siguientes dos conceptos (o en ambos): ) listas
Listas de vectores y conjuntos de vectores La explicación de los temas Dependencia lineal y Bases en el curso de Álgebra Lineal se puede basar en uno de los siguientes dos conceptos (o en ambos): ) listas
1.4.- D E S I G U A L D A D E S
 1.4.- D E S I G U A L D A D E S OBJETIVO: Que el alumno conozca y maneje las reglas empleadas en la resolución de desigualdades y las use para determinar el conjunto solución de una desigualdad dada y
1.4.- D E S I G U A L D A D E S OBJETIVO: Que el alumno conozca y maneje las reglas empleadas en la resolución de desigualdades y las use para determinar el conjunto solución de una desigualdad dada y
Ejemplo 1.2 En el capitulo anterior se demostró que el conjunto. V = IR 2 = {(x, y) : x, y IR}
 : x, y IR}") Subespacios Capítulo 1 Definición 1.1 Subespacio Sea H un subconjunto no vacio de un espacio vectorial V K. Si H es un espacio vectorial sobre K bajo las operaciones de suma y multiplicación por escalar
Subespacios Capítulo 1 Definición 1.1 Subespacio Sea H un subconjunto no vacio de un espacio vectorial V K. Si H es un espacio vectorial sobre K bajo las operaciones de suma y multiplicación por escalar
ECUACION DE DEMANDA. El siguiente ejemplo ilustra como se puede estimar la ecuación de demanda cuando se supone que es lineal.
 ECUACION DE DEMANDA La ecuación de demanda es una ecuación que expresa la relación que existe entre q y p, donde q es la cantidad de artículos que los consumidores están dispuestos a comprar a un precio
ECUACION DE DEMANDA La ecuación de demanda es una ecuación que expresa la relación que existe entre q y p, donde q es la cantidad de artículos que los consumidores están dispuestos a comprar a un precio
Apuntes de Matemática Discreta 9. Funciones
 Apuntes de Matemática Discreta 9. Funciones Francisco José González Gutiérrez Cádiz, Octubre de 004 Universidad de Cádiz Departamento de Matemáticas ii Lección 9 Funciones Contenido 9.1 Definiciones y
Apuntes de Matemática Discreta 9. Funciones Francisco José González Gutiérrez Cádiz, Octubre de 004 Universidad de Cádiz Departamento de Matemáticas ii Lección 9 Funciones Contenido 9.1 Definiciones y
E 1 E 2 E 2 E 3 E 4 E 5 2E 4
 Problemas resueltos de Espacios Vectoriales: 1- Para cada uno de los conjuntos de vectores que se dan a continuación estudia si son linealmente independientes, sistema generador o base: a) (2, 1, 1, 1),
Problemas resueltos de Espacios Vectoriales: 1- Para cada uno de los conjuntos de vectores que se dan a continuación estudia si son linealmente independientes, sistema generador o base: a) (2, 1, 1, 1),
Funciones, x, y, gráficos
 Funciones, x, y, gráficos Vamos a ver los siguientes temas: funciones, definición, dominio, codominio, imágenes, gráficos, y algo más. Recordemos el concepto de función: Una función es una relación entre
Funciones, x, y, gráficos Vamos a ver los siguientes temas: funciones, definición, dominio, codominio, imágenes, gráficos, y algo más. Recordemos el concepto de función: Una función es una relación entre
Juan Antonio González Mota Profesor de Matemáticas del Colegio Juan XIII Zaidín de Granada
 FUNCIONES CONOCIDAS. FUNCIONES LINEALES. Se llaman funciones lineales a aquellas que se representan mediante rectas. Su epresión en forma eplícita es y f ( ) a b. En sentido más estricto, se llaman funciones
FUNCIONES CONOCIDAS. FUNCIONES LINEALES. Se llaman funciones lineales a aquellas que se representan mediante rectas. Su epresión en forma eplícita es y f ( ) a b. En sentido más estricto, se llaman funciones