Control Automático. Introducción al filtro de Kalman. Ing. Gabriela Ortiz León
|
|
|
- Luz Jiménez Correa
- hace 8 años
- Vistas:
Transcripción
1 Control Automático Introducción al filtro de Kalman 1

2 Contenido Principio de funcionamiento Ecuaciones de predicción y actualización Proceso Ejemplo 2

3 Filtro Kalman Es un algoritmo desarrollado por Rupert Kalman que sirve para poder estimar el estado no medible de un sistema dinámico lineal a partir de mediciones de ruido blanco Ruido Blanco Señal aleatoria (proceso estocástico) con una densidad espectral de potencia plana, se caracteriza porque sus valores de señal en dos instantes de tiempo diferentes no guardan correlación estadística 3

4 Principio de Funcionamiento Es un método recursivo para estimar el estado de un sistema lineal minimizando la media del error cuadrático Mediante el conocimiento del comportamiento actual, el filtro de Kalman estima el estado futuro del sistema aplicando un término de corrección proporcional al factor de predicción. 4

5 Problema de Diseño del Observador Estimar el vector de estado a partir de las salidas del sistema Las soluciones de este problema se basan generalmente en modelos de estados El filtro de Kalman es una herramienta utilizada en la estimación estocástica a partir de mediciones ruidosas de sensores 5

6 Clases de filtros de Kalman El filtro de Kalman continuo Aplicable a sistemas continuos lineales El filtro de Kalman discreto Aplicable a sistemas discretos lineales El filtro extendido de Kalman Aplicable a sistemas discretos no lineales 6

7 Ecuaciones de Predicción Son responsables de la proyección del estado al momento k tomando como referencia el estado en el momento k 1 y la actualización intermedia de la matriz de covarianza del error del estado estimado. 7

8 Ecuaciones de actualización Son responsables de la retroalimentación, es decir, incorporan nueva información dentro de la estimación anterior con lo cual se llega a una estimación mejorada del estado. 8

9 Aplicaciones Estimación de parámetros que cambian en el tiempo. Estimación del estado de un sistema en el pasado, presente y futuro, aún cuando la naturaleza precisa del sistema modelado es desconocida. Estimación en presencia de ruido 9

10 Planta en tiempo discreto Vamos a suponer A, B y C constantes y G =1 10

11 Condiciones de operación Los ruidos de proceso y de medición deben ser independientes entre si, blancos y de distribución normal de probabilidad. Las matrices de covarianza de ruido de proceso, Q, y de covarianza de ruido de medición, R, son asumidas como constantes; aunque pueden variar ligeramente entre cada paso de medición También se asume que A y C son constantes; pero podrían cambiar el el tiempo 11

12 Ecuaciones del proceso x(k) = Ax(k-1) + Bu(k-1) + w(k-1) y(k) = Cx(k) + v(k) Eventualmente usaremos, para facilitar la escritura, la notación sin paréntesis para el ordinal k, ej: x(k) será entonces escrita x k 12
 será entonces")
13 Valores que se deben conocer Se debe conocer el ruido del proceso w(k) y el ruido de medición v(k) que son secuencias aleatorias de media cero, esto es: Ε{w(k)} = Ε{v(k)} = 0 Y las covarianzas de ruido: Ε{w(k)w T (k)} = Q(k) Ε{v(k)v T (k)} = R(k) 13
w T (k)} = Q(k) Ε{v(k)v T (k)} =")
14 Los errores Si x k es el estimado a priori del estado en el tiempo k, conocidos el proceso antes del tiempo k y x k es el estimado a posteriori del estado en el tiempo k, dada la medición y k. El error a priori e k =x k x k El error a posteriori e k =x k x k 14

15 La covarianza La covarianza del estimado a priori del error P k =E [e k e k T ] La covarianza del estimado a posteriori del error P k =E [e k e k T ] 15
![k e k T ] La covarianza del estimado](/docs-images/42/14344941/images/page_15.jpg "a posteriori del error P k =E [e k e")
16 El estado estimado a posteriori Se calcula como una combinación lineal del estado estimado a priori y una porción ponderada de la diferencia entre la medición y el valor estimado de la medición. x k = x k + K k ( y k C x k ) La diferencia entre la medición y su estimado se llama innovación de la medición o residuo. La matriz K se escoge para minimizar la covarianza del error a posteriori K k =P k C T ( CP k C T + R ) 1 { lim K k =C 1 R k 0 lim K k =0 P k 16

17 xˆ P Actualización en el tiempo (predicción) a priori ˆ k = Axk 1 + Buk 1 T k = APk 1A + Q El proceso del filtro a posteriori K xˆ Actualización de medición (corrección) xˆ k 1, Pk 1 iniciales T T = Pk C ( CPk C + R) xˆ + K ( y Cxˆ ) k k = k k k k k = ( I KkC Pk P ) El filtro estima el proceso en un instante determinado y luego obtiene realimentación en la forma de una medición ruidosa. 17 1

18 Condiciones del filtro Bajo las condiciones de que R (v. ruido de medición) y Q (v. ruido del proceso) son constantes; entonces, la covarianza estimada del error P k y la ganancia de Kalman K k, se estabilizarán rápido y permanecerán constantes. En este caso, ambas pueden ser calculadas fuera de línea, o encontrando el valor estático de P k. 18

19 Estimador con filtro de Kalman 19


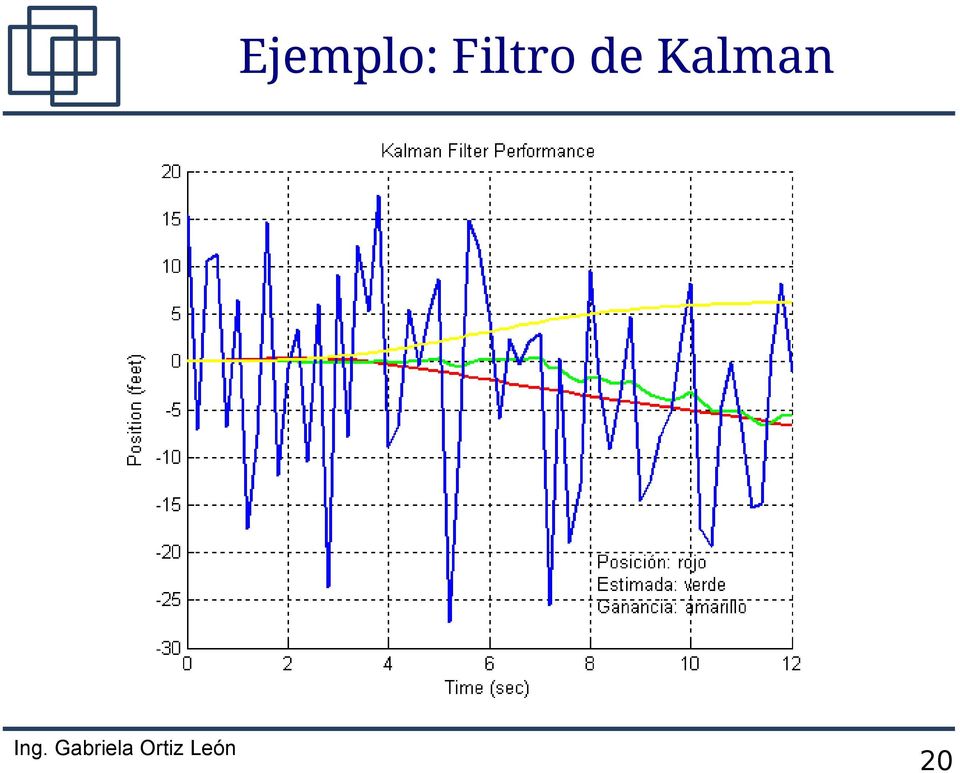
20 Ejemplo: Filtro de Kalman 20
21 Conclusiones (1) El algoritmo de Kalman se basa en un mecanismo de predicción y corrección, que permite minimizar el error. El algoritmo de Kalman recurre a realimentación de estado para la corrección del error. 21
22 Conclusiones (2) Se necesitan condiciones iniciales como el ruido del proceso y el ruido del sistema. Requiere que la media del ruido sea cero, es decir, ruido blanco y que la covarianza del ruido sea distinta de cero. 22
23 Bibliografia [1] An Introduction to the Kalman Filter. Greg Welch and Gary Bishop [2] 23
Comunicaciones Digitales - Ejercicios Tema 3
 Comunicaciones Digitales - Ejercicios Tema 3 007. 1. Considere el diagrama de rejilla para un canal discreto equivalente genérico con 4 coeficientes no nulos (memoria K p = 3) y una constelación -PAM.
Comunicaciones Digitales - Ejercicios Tema 3 007. 1. Considere el diagrama de rejilla para un canal discreto equivalente genérico con 4 coeficientes no nulos (memoria K p = 3) y una constelación -PAM.
EL FILTRO DE KALMAN. Resumen
 EL FILTRO DE KALMAN Carlos Pillajo Universidad Politécnica Salesiana - Ecuador cpillajo@ups.edu.ec Javier E. Sierra Universidad Pontificia Bolivariana Colombia javier.sierra@upb.edu.co Resumen El filtro
EL FILTRO DE KALMAN Carlos Pillajo Universidad Politécnica Salesiana - Ecuador cpillajo@ups.edu.ec Javier E. Sierra Universidad Pontificia Bolivariana Colombia javier.sierra@upb.edu.co Resumen El filtro
Regresión múltiple. Modelos y Simulación. I. Introducción II. Marco teórico III. Aplicación IV. Conclusiones V. Bibliografía
 Regresión múltiple I. Introducción II. Marco teórico III. Aplicación IV. Conclusiones V. Bibliografía I.- INTRODUCCIÓN Como la Estadística Inferencial nos permite trabajar con una variable a nivel de intervalo
Regresión múltiple I. Introducción II. Marco teórico III. Aplicación IV. Conclusiones V. Bibliografía I.- INTRODUCCIÓN Como la Estadística Inferencial nos permite trabajar con una variable a nivel de intervalo
El Filtro de Partículas
 El Filtro de Partículas José Antonio Camarena Ibarrola El Filtro de Partículas p.1/25 El Filtro de Partículas Método Monte Carlo (basado en muestreo) para inferir el estado de un sistema que evoluciona
El Filtro de Partículas José Antonio Camarena Ibarrola El Filtro de Partículas p.1/25 El Filtro de Partículas Método Monte Carlo (basado en muestreo) para inferir el estado de un sistema que evoluciona
Tema 3: Aplicaciones de la diagonalización
 TEORÍA DE ÁLGEBRA II: Tema 3. DIPLOMATURA DE ESTADÍSTICA 1 Tema 3: Aplicaciones de la diagonalización 1 Ecuaciones en diferencias Estudiando la cría de conejos, Fibonacci llegó a las siguientes conclusiones:
TEORÍA DE ÁLGEBRA II: Tema 3. DIPLOMATURA DE ESTADÍSTICA 1 Tema 3: Aplicaciones de la diagonalización 1 Ecuaciones en diferencias Estudiando la cría de conejos, Fibonacci llegó a las siguientes conclusiones:
Tema 10. Estimación Puntual.
 Tema 10. Estimación Puntual. Presentación y Objetivos. 1. Comprender el concepto de estimador y su distribución. 2. Conocer y saber aplicar el método de los momentos y el de máxima verosimilitud para obtener
Tema 10. Estimación Puntual. Presentación y Objetivos. 1. Comprender el concepto de estimador y su distribución. 2. Conocer y saber aplicar el método de los momentos y el de máxima verosimilitud para obtener
Tema 8: Análisis Discriminante. Clasificación. Aurea Grané Departamento de Estadística Universidad Carlos III de Madrid. Análisis discriminante
 Aurea Grané. Máster en Estadística. Universidade Pedagógica. 1 Aurea Grané. Máster en Estadística. Universidade Pedagógica. 2 Análisis discriminante Tema 8: Análisis Discriminante y Clasificación Aurea
Aurea Grané. Máster en Estadística. Universidade Pedagógica. 1 Aurea Grané. Máster en Estadística. Universidade Pedagógica. 2 Análisis discriminante Tema 8: Análisis Discriminante y Clasificación Aurea
Alvaro J. Riascos Villegas Universidad de los Andes y Quantil. Marzo 14 de 2012
 Contenido Motivación Métodos computacionales Integración de Montecarlo Muestreo de Gibbs Rejection Muestreo Importante Metropolis - Hasting Markov Chain Montecarlo Method Complemento ejemplos libro: Bayesian
Contenido Motivación Métodos computacionales Integración de Montecarlo Muestreo de Gibbs Rejection Muestreo Importante Metropolis - Hasting Markov Chain Montecarlo Method Complemento ejemplos libro: Bayesian
mcd y mcm Máximo Común Divisor y Mínimo Común múltiplo www.math.com.mx José de Jesús Angel Angel jjaa@math.com.mx
 mcd y mcm Máximo Común Divisor y Mínimo Común múltiplo www.math.com.mx José de Jesús Angel Angel jjaa@math.com.mx MathCon c 2007-2008 Contenido 1. Divisores de un número entero 2 2. Máximo común divisor
mcd y mcm Máximo Común Divisor y Mínimo Común múltiplo www.math.com.mx José de Jesús Angel Angel jjaa@math.com.mx MathCon c 2007-2008 Contenido 1. Divisores de un número entero 2 2. Máximo común divisor
V.4 Incertidumbre, Métodos Probabilísticos de Análisis de Alternativas
 . Incertidumbre Nadie puede predecir el futuro. Sólo es posible formular hipótesis más o menos fundadas. Es un futuro que contiene un número indeterminado de resultados posibles, ninguno de los cuales
. Incertidumbre Nadie puede predecir el futuro. Sólo es posible formular hipótesis más o menos fundadas. Es un futuro que contiene un número indeterminado de resultados posibles, ninguno de los cuales
Aplicaciones Lineales
 Aplicaciones Lineales Ejercicio Dada la matriz A = 0 2 0 a) Escribir explícitamente la aplicación lineal f : 2 cuya matriz asociada con respecto a las bases canónicas es A. En primer lugar definimos las
Aplicaciones Lineales Ejercicio Dada la matriz A = 0 2 0 a) Escribir explícitamente la aplicación lineal f : 2 cuya matriz asociada con respecto a las bases canónicas es A. En primer lugar definimos las
Capítulo I. Convertidores de CA-CD y CD-CA
 Capítulo I. Convertidores de CA-CD y CD-CA 1.1 Convertidor CA-CD Un convertidor de corriente alterna a corriente directa parte de un rectificador de onda completa. Su carga puede ser puramente resistiva,
Capítulo I. Convertidores de CA-CD y CD-CA 1.1 Convertidor CA-CD Un convertidor de corriente alterna a corriente directa parte de un rectificador de onda completa. Su carga puede ser puramente resistiva,
Matrices. Definiciones básicas de matrices. www.math.com.mx. José de Jesús Angel Angel. jjaa@math.com.mx
 Matrices Definiciones básicas de matrices wwwmathcommx José de Jesús Angel Angel jjaa@mathcommx MathCon c 2007-2008 Contenido 1 Matrices 2 11 Matrices cuadradas 3 12 Matriz transpuesta 4 13 Matriz identidad
Matrices Definiciones básicas de matrices wwwmathcommx José de Jesús Angel Angel jjaa@mathcommx MathCon c 2007-2008 Contenido 1 Matrices 2 11 Matrices cuadradas 3 12 Matriz transpuesta 4 13 Matriz identidad
Escuela Académico Profesional de Economía Curso. Examen Parcial No. 1 (solucionario) Tema. Varian 2, 3, 4, 5, 6, 8 y 14 Profesor
 Tema. Varian 2, 3, 4, 5, 6, 8 y 14 Profesor") Facultad Ciencias Económicas Escuela Escuela Académico Profesional de Economía Curso Microeconomía I Código CO1214 Aula 218 Actividad Examen Parcial No. 1 (solucionario) Tema Varian 2, 3, 4, 5, 6, 8 y
Facultad Ciencias Económicas Escuela Escuela Académico Profesional de Economía Curso Microeconomía I Código CO1214 Aula 218 Actividad Examen Parcial No. 1 (solucionario) Tema Varian 2, 3, 4, 5, 6, 8 y
Cómo?: Resolviendo el sistema lineal homógeneo que satisfacen las componentes de cualquier vector de S. x4 = x 1 x 3 = x 2 x 1
 . ESPACIOS VECTORIALES Consideremos el siguiente subconjunto de R 4 : S = {(x, x 2, x 3, x 4 )/x x 4 = 0 x 2 x 4 = x 3 a. Comprobar que S es subespacio vectorial de R 4. Para demostrar que S es un subespacio
. ESPACIOS VECTORIALES Consideremos el siguiente subconjunto de R 4 : S = {(x, x 2, x 3, x 4 )/x x 4 = 0 x 2 x 4 = x 3 a. Comprobar que S es subespacio vectorial de R 4. Para demostrar que S es un subespacio
UNIDAD 6. Programación no lineal
 UNIDAD 6 Programación no lineal En matemática Programación no lineal (PNL) es el proceso de resolución de un sistema de igualdades y desigualdades sujetas a un conjunto de restricciones sobre un conjunto
UNIDAD 6 Programación no lineal En matemática Programación no lineal (PNL) es el proceso de resolución de un sistema de igualdades y desigualdades sujetas a un conjunto de restricciones sobre un conjunto
En la presente investigación, se contrastará el modelo propuesto en la. investigación de Marisa Bucheli y Carlos Casacubierta, Asistencia escolar y
 Capítulo 2.- Metodología En la presente investigación, se contrastará el modelo propuesto en la investigación de Marisa Bucheli y Carlos Casacubierta, Asistencia escolar y Participación en el mercado de
Capítulo 2.- Metodología En la presente investigación, se contrastará el modelo propuesto en la investigación de Marisa Bucheli y Carlos Casacubierta, Asistencia escolar y Participación en el mercado de
APLICACIÓN DE LOS FILTROS DE KALMAN A SISTEMAS DE CONTROL. José Gregorio Díaz (1); Ana María Mejías (2); Francisco Arteaga (3)
; Ana María Mejías (2); Francisco Arteaga (3)") APLICACIÓN DE LOS FILTROS DE KALMAN A SISTEMAS DE CONTROL José Gregorio Díaz (1); Ana María Mejías (2); Francisco Arteaga (3) (1) Universidad de Carabobo, Escuela de Ing. Eléctrica. Dpto. de Sistemas y
APLICACIÓN DE LOS FILTROS DE KALMAN A SISTEMAS DE CONTROL José Gregorio Díaz (1); Ana María Mejías (2); Francisco Arteaga (3) (1) Universidad de Carabobo, Escuela de Ing. Eléctrica. Dpto. de Sistemas y
Puede considerarse un caso especial de l análisis de regresión en donde la variable dependiente es dicotómica («Sí» [1] o «No» [0])
![Puede considerarse un caso especial de l análisis de regresión en donde la variable dependiente es dicotómica («Sí» [1] o «No» [0])](/thumbs/26/8238733.jpg "Puede considerarse un caso especial de l análisis de regresión en donde la variable dependiente es dicotómica («Sí» [1] o «No» [0])") Regresión logística Puede considerarse un caso especial de l análisis de regresión en donde la variable dependiente es dicotómica («Sí» [1] o «No» [0]) Se trata de calcular la probabilidad en la que una
Regresión logística Puede considerarse un caso especial de l análisis de regresión en donde la variable dependiente es dicotómica («Sí» [1] o «No» [0]) Se trata de calcular la probabilidad en la que una
CAPITULO 4 JUSTIFICACION DEL ESTUDIO. En este capítulo se presenta la justificación del estudio, supuestos y limitaciones de
 CAPITULO 4 JUSTIFICACION DEL ESTUDIO En este capítulo se presenta la justificación del estudio, supuestos y limitaciones de estudios previos y los alcances que justifican el presente estudio. 4.1. Justificación.
CAPITULO 4 JUSTIFICACION DEL ESTUDIO En este capítulo se presenta la justificación del estudio, supuestos y limitaciones de estudios previos y los alcances que justifican el presente estudio. 4.1. Justificación.
CRITERIOS DE REVISION DE ESTUDIOS Y DECLARACIONES DE IMPACTO AMBIENTAL EN RELACION A LA CONTAMINACION ACUSTICA
 CRITERIOS DE REVISION DE ESTUDIOS Y DECLARACIONES DE IMPACTO AMBIENTAL EN RELACION A LA CONTAMINACION ACUSTICA Antonio Andrés Marzzano Ríos Dirección: Olivares 1229 5º piso, Santiago Ingeniero Acústico
CRITERIOS DE REVISION DE ESTUDIOS Y DECLARACIONES DE IMPACTO AMBIENTAL EN RELACION A LA CONTAMINACION ACUSTICA Antonio Andrés Marzzano Ríos Dirección: Olivares 1229 5º piso, Santiago Ingeniero Acústico
1. Teorema del Valor Medio
 1. l Valor Medio Uno de los teoremas más importantes del cálculo diferencial de funciones reales de una variable real es el l Valor Medio, del que se obtienen consecuencias como el Taylor y el estudio
1. l Valor Medio Uno de los teoremas más importantes del cálculo diferencial de funciones reales de una variable real es el l Valor Medio, del que se obtienen consecuencias como el Taylor y el estudio
2.5 Linealización de sistemas dinámicos no lineales
 25 Linealización de sistemas dinámicos no lineales En las secciones anteriores hemos visto como representar los sistemas lineales En esta sección se estudia una manera de obtener una aproximación lineal
25 Linealización de sistemas dinámicos no lineales En las secciones anteriores hemos visto como representar los sistemas lineales En esta sección se estudia una manera de obtener una aproximación lineal
PEOBLEMAS RESUELTO DE CADENAS DE MARKOV
 PROBLEMAS RESUELTOS DE CADENAS DE MARKOV TEMA: CADENAS DE MARKOV Prof.: MSc. Julio Rito Vargas Avilés I. El departamento de estudios de mercado de una fábrica estima que el 20% de la gente que compra un
PROBLEMAS RESUELTOS DE CADENAS DE MARKOV TEMA: CADENAS DE MARKOV Prof.: MSc. Julio Rito Vargas Avilés I. El departamento de estudios de mercado de una fábrica estima que el 20% de la gente que compra un
El modelo Ordinal y el modelo Multinomial
 El modelo Ordinal y el modelo Multinomial Microeconomía Cuantitativa R. Mora Departmento de Economía Universidad Carlos III de Madrid Esquema Motivación 1 Motivación 2 3 Motivación Consideramos las siguientes
El modelo Ordinal y el modelo Multinomial Microeconomía Cuantitativa R. Mora Departmento de Economía Universidad Carlos III de Madrid Esquema Motivación 1 Motivación 2 3 Motivación Consideramos las siguientes
Cadenas de Markov. http://humberto-r-alvarez-a.webs.com
 Cadenas de Markov http://humberto-r-alvarez-a.webs.com Definición Procesos estocásticos: procesos que evolucionan de forma no determinista a lo largo del tiempo en torno a un conjunto de estados. Estos
Cadenas de Markov http://humberto-r-alvarez-a.webs.com Definición Procesos estocásticos: procesos que evolucionan de forma no determinista a lo largo del tiempo en torno a un conjunto de estados. Estos
Matrices: Conceptos y Operaciones Básicas
 Matrices: Conceptos y Operaciones Básicas Departamento de Matemáticas, CCIR/ITESM 8 de septiembre de 010 Índice 111 Introducción 1 11 Matriz 1 113 Igualdad entre matrices 11 Matrices especiales 3 115 Suma
Matrices: Conceptos y Operaciones Básicas Departamento de Matemáticas, CCIR/ITESM 8 de septiembre de 010 Índice 111 Introducción 1 11 Matriz 1 113 Igualdad entre matrices 11 Matrices especiales 3 115 Suma
Definición 1.1.1. Dados dos números naturales m y n, una matriz de orden o dimensión m n es una tabla numérica rectangular con m filas y n columnas.
 Tema 1 Matrices Estructura del tema. Conceptos básicos y ejemplos Operaciones básicas con matrices Método de Gauss Rango de una matriz Concepto de matriz regular y propiedades Determinante asociado a una
Tema 1 Matrices Estructura del tema. Conceptos básicos y ejemplos Operaciones básicas con matrices Método de Gauss Rango de una matriz Concepto de matriz regular y propiedades Determinante asociado a una
RELACIONES DE RECURRENCIA
 Unidad 3 RELACIONES DE RECURRENCIA 60 Capítulo 5 RECURSIÓN Objetivo general Conocer en forma introductoria los conceptos propios de la recurrencia en relación con matemática discreta. Objetivos específicos
Unidad 3 RELACIONES DE RECURRENCIA 60 Capítulo 5 RECURSIÓN Objetivo general Conocer en forma introductoria los conceptos propios de la recurrencia en relación con matemática discreta. Objetivos específicos
APLICACIÓN DE MÉTODOS SECUENCIALES DE MONTE CARLO SENSIBLES AL RIESGO EN LA ESTIMACIÓN DE VIDA ÚTIL DE COMPONENTES
 UNIVERSIDAD DE CHILE FACULTAD DE CIENCIAS FÍSICAS Y MATEMÁTICAS DEPARTAMENTO DE INGENIERÍA ELÉCTRICA APLICACIÓN DE MÉTODOS SECUENCIALES DE MONTE CARLO SENSIBLES AL RIESGO EN LA ESTIMACIÓN DE VIDA ÚTIL
UNIVERSIDAD DE CHILE FACULTAD DE CIENCIAS FÍSICAS Y MATEMÁTICAS DEPARTAMENTO DE INGENIERÍA ELÉCTRICA APLICACIÓN DE MÉTODOS SECUENCIALES DE MONTE CARLO SENSIBLES AL RIESGO EN LA ESTIMACIÓN DE VIDA ÚTIL
Prácticas de Algebra con Mathematica II (Ingeniería Industrial). Jose Salvador Cánovas Peña. Departamento de Matemática Aplicada y Estadística.
. Jose Salvador Cánovas Peña. Departamento de Matemática Aplicada y Estadística.") Prácticas de Algebra con Mathematica II (Ingeniería Industrial). Jose Salvador Cánovas Peña. Departamento de Matemática Aplicada y Estadística. Índice General 1 PRACTICAS CON MATHEMATICA 2 1.1 Introducción...
Prácticas de Algebra con Mathematica II (Ingeniería Industrial). Jose Salvador Cánovas Peña. Departamento de Matemática Aplicada y Estadística. Índice General 1 PRACTICAS CON MATHEMATICA 2 1.1 Introducción...
Técnicas Recursivas Para Estimación Dinámica Una Introducción Matemática al Filtro Kalman. Guillermo Prado Obando gprado@etb.net.
 Técnicas Recursivas Para Estimación Dinámica Una Introducción Matemática al Filtro Kalman Guillermo Prado Obando gprado@etb.net.co Trabajo Para Optar por el Título de Matemático Director: Pervys Rengifo
Técnicas Recursivas Para Estimación Dinámica Una Introducción Matemática al Filtro Kalman Guillermo Prado Obando gprado@etb.net.co Trabajo Para Optar por el Título de Matemático Director: Pervys Rengifo
MODELOS DE RECUPERACION
 RECUPERACIÓN Y ORGANIZACIÓN DE LA INFORMACIÓN INGENIERÍA INFORMÁTICA RECUPERACIÓN Y ACCESO A LA INFORMACIÓN MODELOS DE RECUPERACION AUTOR: Rubén García Broncano NIA 100065530 grupo 81 1 INDICE 1- INTRODUCCIÓN
RECUPERACIÓN Y ORGANIZACIÓN DE LA INFORMACIÓN INGENIERÍA INFORMÁTICA RECUPERACIÓN Y ACCESO A LA INFORMACIÓN MODELOS DE RECUPERACION AUTOR: Rubén García Broncano NIA 100065530 grupo 81 1 INDICE 1- INTRODUCCIÓN
Sistemas de Ecuaciones Lineales y Matrices
 Sistemas de Ecuaciones Lineales y Matrices Oscar G Ibarra-Manzano, DSc Departamento de Area Básica - Tronco Común DES de Ingenierías Facultad de Ingeniería, Mecánica, Eléctrica y Electrónica Trimestre
Sistemas de Ecuaciones Lineales y Matrices Oscar G Ibarra-Manzano, DSc Departamento de Area Básica - Tronco Común DES de Ingenierías Facultad de Ingeniería, Mecánica, Eléctrica y Electrónica Trimestre
GEOMETRÍA ANALÍTICA 2º Curso de Bachillerato 22 de mayo de 2008
 1. Sean los puntos A (1, 0,-1) y B (,-1, 3). Calcular la distancia del origen de coordenadas a la recta que pasa por A y B. Calculemos la recta que pasa por A y B. El vector AB es (1,-1,4) y por tanto
1. Sean los puntos A (1, 0,-1) y B (,-1, 3). Calcular la distancia del origen de coordenadas a la recta que pasa por A y B. Calculemos la recta que pasa por A y B. El vector AB es (1,-1,4) y por tanto
Cap. 24 La Ley de Gauss
 Cap. 24 La Ley de Gauss Una misma ley física enunciada desde diferentes puntos de vista Coulomb Gauss Son equivalentes Pero ambas tienen situaciones para las cuales son superiores que la otra Aquí hay
Cap. 24 La Ley de Gauss Una misma ley física enunciada desde diferentes puntos de vista Coulomb Gauss Son equivalentes Pero ambas tienen situaciones para las cuales son superiores que la otra Aquí hay
Líneas de espera. Introducción.
 Líneas de espera. Introducción. En este capítulo se aplica la teoría de colas. Una Cola es una línea de espera y la teoría de colas es una colección de modelos matemáticos que describen sistemas de líneas
Líneas de espera. Introducción. En este capítulo se aplica la teoría de colas. Una Cola es una línea de espera y la teoría de colas es una colección de modelos matemáticos que describen sistemas de líneas
Estimación de una probabilidad
 Estimación de una probabilidad Introducción En general, la probabilidad de un suceso es desconocida y debe estimarse a partir de una muestra representativa. Para ello, deberemos conocer el procedimiento
Estimación de una probabilidad Introducción En general, la probabilidad de un suceso es desconocida y debe estimarse a partir de una muestra representativa. Para ello, deberemos conocer el procedimiento
Una invitación al estudio de las cadenas de Markov
 Una invitación al estudio de las cadenas de Markov Víctor RIVERO Centro de Investigación en Matemáticas A. C. Taller de solución de problemas de probabilidad, 21-25 de Enero de 2008. 1/ 1 Introducción
Una invitación al estudio de las cadenas de Markov Víctor RIVERO Centro de Investigación en Matemáticas A. C. Taller de solución de problemas de probabilidad, 21-25 de Enero de 2008. 1/ 1 Introducción
Finanzas de Empresas Turísticas
 Finanzas de Empresas Turísticas Prof. Francisco Pérez Hernández (f.perez@uam.es) Departamento de Financiación e Investigación de la Universidad Autónoma de Madrid 1 Departamento de Financiación e Investigación
Finanzas de Empresas Turísticas Prof. Francisco Pérez Hernández (f.perez@uam.es) Departamento de Financiación e Investigación de la Universidad Autónoma de Madrid 1 Departamento de Financiación e Investigación
Tema 3. Secuencias y transformada z
 Ingeniería de Control Tema 3. Secuencias y transformada z Daniel Rodríguez Ramírez Teodoro Alamo Cantarero Contextualización del tema Conocimientos que se adquieren en este tema: Concepto de secuencia
Ingeniería de Control Tema 3. Secuencias y transformada z Daniel Rodríguez Ramírez Teodoro Alamo Cantarero Contextualización del tema Conocimientos que se adquieren en este tema: Concepto de secuencia
Los valores de las respuesta son las puntuaciones que, de cada individuo, o cluster, obtenemos semanalmente durante cinco semanas consecutivas:
 Sobre los modelos lineales mixtos Ejemplo: Recuperación de infarto. Para estudiar las diferencias entre dos procedimientos diferentes de recuperación de pacientes de un infarto, se consideraron dos grupos
Sobre los modelos lineales mixtos Ejemplo: Recuperación de infarto. Para estudiar las diferencias entre dos procedimientos diferentes de recuperación de pacientes de un infarto, se consideraron dos grupos
Ambas componentes del sistema tienen costos asociados que deben de considerarse.
 1. Introducción. En este trabajo se aplica la teoría de colas. Una Cola es una línea de espera y la teoría de colas es una colección de modelos matemáticos que describen sistemas de líneas de espera particulares
1. Introducción. En este trabajo se aplica la teoría de colas. Una Cola es una línea de espera y la teoría de colas es una colección de modelos matemáticos que describen sistemas de líneas de espera particulares
Métodos Iterativos para Resolver Sistemas Lineales
 Métodos Iterativos para Resolver Sistemas Lineales Departamento de Matemáticas, CCIR/ITESM 17 de julio de 2009 Índice 3.1. Introducción............................................... 1 3.2. Objetivos................................................
Métodos Iterativos para Resolver Sistemas Lineales Departamento de Matemáticas, CCIR/ITESM 17 de julio de 2009 Índice 3.1. Introducción............................................... 1 3.2. Objetivos................................................
EJERCICIOS DE MATEMÁTICAS I HOJA 4. Ejercicio 1. Se consideran los vectores
 EJERCICIOS DE MATEMÁTICAS I HOJA 4 Ejercicio 1. Se consideran los vectores u 1 = (1, 1, 0, 1), u 2 = (0, 2, 1, 0), u 3 = ( 1, 1, 1, 1), u 4 = (2, 2, 1, 0) de R 4. Expresa, si es posible, los vectores u
EJERCICIOS DE MATEMÁTICAS I HOJA 4 Ejercicio 1. Se consideran los vectores u 1 = (1, 1, 0, 1), u 2 = (0, 2, 1, 0), u 3 = ( 1, 1, 1, 1), u 4 = (2, 2, 1, 0) de R 4. Expresa, si es posible, los vectores u
ANALISIS DE BITACORAS POR METODO RELACIONAL- PROBABILISTICO EN SISTEMAS CON COMPORTAMIENTO CAUSA-EFECTO
 ANALISIS DE BITACORAS POR METODO RELACIONAL- PROBABILISTICO EN SISTEMAS CON COMPORTAMIENTO CAUSA-EFECTO Omar Fernando Mata Hurtado Mexico Software Lab TestCenter IBM Guadalajara Resumen El presente artículo
ANALISIS DE BITACORAS POR METODO RELACIONAL- PROBABILISTICO EN SISTEMAS CON COMPORTAMIENTO CAUSA-EFECTO Omar Fernando Mata Hurtado Mexico Software Lab TestCenter IBM Guadalajara Resumen El presente artículo
Funciones de varias variables
 Funciones de varias variables Derivadas parciales. El concepto de función derivable no se puede extender de una forma sencilla para funciones de varias variables. Aquí se emplea el concepto de diferencial
Funciones de varias variables Derivadas parciales. El concepto de función derivable no se puede extender de una forma sencilla para funciones de varias variables. Aquí se emplea el concepto de diferencial
REPRESENTACIÓN DE UNA DISTRIBUCIÓN DE PROBABILIDAD DISCRETA
 REPRESENTACIÓN DE UNA DISTRIBUCIÓN DE PROBABILIDAD DISCRETA Similar a las distribuciones de frecuencia, una distribución de probabilidad discreta puede ser representada (descrita) tanto gráficamente como
REPRESENTACIÓN DE UNA DISTRIBUCIÓN DE PROBABILIDAD DISCRETA Similar a las distribuciones de frecuencia, una distribución de probabilidad discreta puede ser representada (descrita) tanto gráficamente como
Inferencia Estadística
 EYP14 Estadística para Construcción Civil 1 Inferencia Estadística El campo de la inferencia estadística está formado por los métodos utilizados para tomar decisiones o para obtener conclusiones sobre
EYP14 Estadística para Construcción Civil 1 Inferencia Estadística El campo de la inferencia estadística está formado por los métodos utilizados para tomar decisiones o para obtener conclusiones sobre
Tema 07: Acondicionamiento
 Tema 07: Acondicionamiento Solicitado: Ejercicios 02: Simulación de circuitos amplificadores Ejercicios 03 Acondicionamiento Lineal M. en C. Edgardo Adrián Franco Martínez http://www.eafranco.com edfrancom@ipn.mx
Tema 07: Acondicionamiento Solicitado: Ejercicios 02: Simulación de circuitos amplificadores Ejercicios 03 Acondicionamiento Lineal M. en C. Edgardo Adrián Franco Martínez http://www.eafranco.com edfrancom@ipn.mx
Listas de vectores y conjuntos de vectores
 Listas de vectores y conjuntos de vectores La explicación de los temas Dependencia lineal y Bases en el curso de Álgebra Lineal se puede basar en uno de los siguientes dos conceptos (o en ambos): ) listas
Listas de vectores y conjuntos de vectores La explicación de los temas Dependencia lineal y Bases en el curso de Álgebra Lineal se puede basar en uno de los siguientes dos conceptos (o en ambos): ) listas
CAPITULO 2 DISEÑO DE GRAFICAS ESTADISTICO-ECONOMICAS DE CONTROL DE CALIDAD.
 CAPITULO 2 DISEÑO DE GRAFICAS ESTADISTICO-ECONOMICAS DE CONTROL DE CALIDAD. En este capítulo se presenta la definición de diseño estadístico, económico y económico-estadístico para gráficas de control,
CAPITULO 2 DISEÑO DE GRAFICAS ESTADISTICO-ECONOMICAS DE CONTROL DE CALIDAD. En este capítulo se presenta la definición de diseño estadístico, económico y económico-estadístico para gráficas de control,
f(x)=a n x n +a n-1 x n-1 +a n-2 x n-2 +...a 2 x 2 +a 1 x 1 +a 0
=a n x n +a n-1 x n-1 +a n-2 x n-2 +...a 2 x 2 +a 1 x 1 +a 0") FUNCIÓN POLINOMIAL. DEFINICIÓN. Las funciones polinomiales su representación gráfica, tienen gran importancia en la matemática. Estas funciones son modelos que describen relaciones entre dos variables
FUNCIÓN POLINOMIAL. DEFINICIÓN. Las funciones polinomiales su representación gráfica, tienen gran importancia en la matemática. Estas funciones son modelos que describen relaciones entre dos variables
2 año secundario. Función Lineal MINISTERIO DE EDUCACIÓN. Se llama función lineal porque la potencia de la x es 1. Su gráfico es una recta.
 año secundario Función Lineal Se llama función lineal porque la potencia de la x es. Su gráfico es una recta. Y en general decimos que es de la forma : f(x)= a. x + b donde a y b son constantes, a recibe
año secundario Función Lineal Se llama función lineal porque la potencia de la x es. Su gráfico es una recta. Y en general decimos que es de la forma : f(x)= a. x + b donde a y b son constantes, a recibe
AÑO 2014 CÓDIGO DE CARRERA TIPO No VERSIÓN 7 6 5 05 01 01 MES 06. Objetivo 1. Criterio de Dominio 3/4. Pregunta 1
 Integral 2015-1 1/7 CURSO: SEMESTRE IV Modelo de Respuestas ASIGNATURA: DIDÁCTICA DEL ÁLGEBRA LINEAL Y LA 765 PROBABILIDAD FECHA DE APLICACIÓN DIA 28 MES 06 AÑO 2014 CÓDIGO DE CARRERA TIPO No VERSIÓN 7
Integral 2015-1 1/7 CURSO: SEMESTRE IV Modelo de Respuestas ASIGNATURA: DIDÁCTICA DEL ÁLGEBRA LINEAL Y LA 765 PROBABILIDAD FECHA DE APLICACIÓN DIA 28 MES 06 AÑO 2014 CÓDIGO DE CARRERA TIPO No VERSIÓN 7
Control Estadístico del Proceso. Ing. Claudia Salguero Ing. Alvaro Díaz
 Control Estadístico del Proceso Ing. Claudia Salguero Ing. Alvaro Díaz Control Estadístico del Proceso Es un conjunto de herramientas estadísticas que permiten recopilar, estudiar y analizar la información
Control Estadístico del Proceso Ing. Claudia Salguero Ing. Alvaro Díaz Control Estadístico del Proceso Es un conjunto de herramientas estadísticas que permiten recopilar, estudiar y analizar la información
SEPTIEMBRE 2005. Opción A
 Selectividad Septiembre 005 SEPTIEMBRE 005 Opción A 4 5.- Calcula dos matrices cuadradas A y B sabiendo que A + 3B = y que A B =..- Se considera la parábola p (x) = 0,5 x +,5 x y sea s (x) la línea poligonal
Selectividad Septiembre 005 SEPTIEMBRE 005 Opción A 4 5.- Calcula dos matrices cuadradas A y B sabiendo que A + 3B = y que A B =..- Se considera la parábola p (x) = 0,5 x +,5 x y sea s (x) la línea poligonal
Procesos Estacionarios. Francisco J. González Serrano. Universidad Carlos III de Madrid
 PREDICCIÓN DE SEÑALES Procesos Estacionarios Francisco J. González Serrano Universidad Carlos III de Madrid Procesos Estacionarios A la hora de hacer predicciones parece obvio suponer que algo debe permanecer
PREDICCIÓN DE SEÑALES Procesos Estacionarios Francisco J. González Serrano Universidad Carlos III de Madrid Procesos Estacionarios A la hora de hacer predicciones parece obvio suponer que algo debe permanecer
Software RAFAM MÓDULO ADMINISTRACION DE PERSONAL Detalle de Versiones
 Software RAFAM MÓDULO ADMINISTRACION DE PERSONAL Detalle de Versiones Versión: 7.5.1 FECHA: 08-04-2016 TABLA DE CONTENIDOS Orden CONTENIDOS Página Identificación interna 1 Control para la NO generación
Software RAFAM MÓDULO ADMINISTRACION DE PERSONAL Detalle de Versiones Versión: 7.5.1 FECHA: 08-04-2016 TABLA DE CONTENIDOS Orden CONTENIDOS Página Identificación interna 1 Control para la NO generación
CLASE10. Opciones Americanas Valuacion de Opciones Americanas.
 CLASE. Opciones Americanas Valuacion de Opciones Americanas. Porque es atractiva una opcion americana? Cualquier producto derivado puede diseñarse como un producto de tipo americano simplemente añadiendo
CLASE. Opciones Americanas Valuacion de Opciones Americanas. Porque es atractiva una opcion americana? Cualquier producto derivado puede diseñarse como un producto de tipo americano simplemente añadiendo
Registro contable de Supuesto 10 Determinación del derivados OTC valor de una prima de opción (2)
") Ejercicio 10 10 DETERMINACIÓN DE UNA PRIMA EN UNA OPCION (MODELO DE BLACK SCHOLES) Instrucciones Vamos a calcular cual es el importe al que asciende una prima en una opción aplicando el modelo más extendido
Ejercicio 10 10 DETERMINACIÓN DE UNA PRIMA EN UNA OPCION (MODELO DE BLACK SCHOLES) Instrucciones Vamos a calcular cual es el importe al que asciende una prima en una opción aplicando el modelo más extendido
Estructuras de Datos y Algoritmos
 Estructuras de Datos y Algoritmos Año 205 Deducción de algunos esfuerzos para una Distribución pseudo-aleatoria de datos Introducción Vamos a desarrollar algunos de los esfuerzos para estructuras que utilizan
Estructuras de Datos y Algoritmos Año 205 Deducción de algunos esfuerzos para una Distribución pseudo-aleatoria de datos Introducción Vamos a desarrollar algunos de los esfuerzos para estructuras que utilizan
3.- DETERMINANTES. a 11 a 22 a 12 a 21
 3.- DETERMINANTES. 3.1. -DEFINICIÓN Dada una matriz cuadrada de orden n, se llama determinante de esta matriz (y se representa por A o deta al polinomio cuyos términos son todos los productos posibles
3.- DETERMINANTES. 3.1. -DEFINICIÓN Dada una matriz cuadrada de orden n, se llama determinante de esta matriz (y se representa por A o deta al polinomio cuyos términos son todos los productos posibles
Semana de dieta (X) 1 2 3 4 5 Peso en Kg (Y) 88.5 87 84 82.5 79
 1 2 3 4 5 Peso en Kg (Y) 88.5 87 84 82.5 79") . Una persona se somete a una dieta de adelgazamiento durante cinco semanas. A continuación se detalla su peso al término de cada una de esas semanas: Semana de dieta X) 2 3 4 Peso en Kg Y) 88. 87 84 82.
. Una persona se somete a una dieta de adelgazamiento durante cinco semanas. A continuación se detalla su peso al término de cada una de esas semanas: Semana de dieta X) 2 3 4 Peso en Kg Y) 88. 87 84 82.
Modelo de fuerza deportiva NOTA TÉCNICA
 Modelo de fuerza deportiva NOTA TÉCNICA Contenido 1 Motivación 3 2 El modelo de fuerza deportiva 3 2.1 Supuestos del modelo 3 2.2 Críticas al modelo 4 2.3 Formulación 4 2.4 Estimación de los parámetros
Modelo de fuerza deportiva NOTA TÉCNICA Contenido 1 Motivación 3 2 El modelo de fuerza deportiva 3 2.1 Supuestos del modelo 3 2.2 Críticas al modelo 4 2.3 Formulación 4 2.4 Estimación de los parámetros
35 Facultad de Ciencias Universidad de Los Andes Mérida-Venezuela. Potencial Eléctrico
 q 1 q 2 Prof. Félix Aguirre 35 Energía Electrostática Potencial Eléctrico La interacción electrostática es representada muy bien a través de la ley de Coulomb, esto es: mediante fuerzas. Existen, sin embargo,
q 1 q 2 Prof. Félix Aguirre 35 Energía Electrostática Potencial Eléctrico La interacción electrostática es representada muy bien a través de la ley de Coulomb, esto es: mediante fuerzas. Existen, sin embargo,
x 10000 y 8000 x + y 15000 a) La región factible asociada a las restricciones anteriores es la siguiente: Pedro Castro Ortega lasmatematicas.
 La región factible asociada a las restricciones anteriores es la siguiente: Pedro Castro Ortega lasmatematicas.") Pruebas de Acceso a Enseñanzas Universitarias Oficiales de Grado (PAEG) Matemáticas aplicadas a las Ciencias Sociales II - Septiembre 2012 - Propuesta A 1. Queremos realizar una inversión en dos tipos
Pruebas de Acceso a Enseñanzas Universitarias Oficiales de Grado (PAEG) Matemáticas aplicadas a las Ciencias Sociales II - Septiembre 2012 - Propuesta A 1. Queremos realizar una inversión en dos tipos
En la sección anterior nos quedamos en que: La estructura de un Agente está dado por: Agente = Arquitectura + Programa
 En la sección anterior nos quedamos en que: La estructura de un Agente está dado por: Agente = Arquitectura + Programa ARQ: HARD AND SOFT PRG: FUNCION DE AGENTE 1 Tomemos el caso de un conductor de taxis
En la sección anterior nos quedamos en que: La estructura de un Agente está dado por: Agente = Arquitectura + Programa ARQ: HARD AND SOFT PRG: FUNCION DE AGENTE 1 Tomemos el caso de un conductor de taxis
ACTIVIDAD N 5. Entrenador de Electricidad para el Estudio de Circuitos Serie-Paralelo
 ACTIVIDAD N 5 Entrenador de Electricidad para el Estudio de Circuitos Serie-Paralelo Nombre de la actividad: Ley de nodos (corrientes) de Kirchhoff Duración: 2 horas Objetivo Identificar el comportamiento
ACTIVIDAD N 5 Entrenador de Electricidad para el Estudio de Circuitos Serie-Paralelo Nombre de la actividad: Ley de nodos (corrientes) de Kirchhoff Duración: 2 horas Objetivo Identificar el comportamiento
Ahora podemos comparar fácilmente las cantidades de cada tamaño que se vende. Estos valores de la matriz se denominan elementos.
 Materia: Matemática de 5to Tema: Definición y Operaciones con Matrices 1) Definición Marco Teórico Una matriz consta de datos que se organizan en filas y columnas para formar un rectángulo. Por ejemplo,
Materia: Matemática de 5to Tema: Definición y Operaciones con Matrices 1) Definición Marco Teórico Una matriz consta de datos que se organizan en filas y columnas para formar un rectángulo. Por ejemplo,
REGLAMENTO DE LOS SERVICIOS DE PREVENCIÓN. RD 39/1997, de 17 de enero
 REGLAMENTO DE LOS SERVICIOS DE PREVENCIÓN RD 39/1997, de 17 de enero Dónde se ha desarrollar la actividad preventiva en la empresa? En el conjunto de sus actividades y decisiones. En los procesos técnicos.
REGLAMENTO DE LOS SERVICIOS DE PREVENCIÓN RD 39/1997, de 17 de enero Dónde se ha desarrollar la actividad preventiva en la empresa? En el conjunto de sus actividades y decisiones. En los procesos técnicos.
Objetivos: Al inalizar la unidad, el alumno:
 Unidad 7 transformaciones lineales Objetivos: Al inalizar la unidad, el alumno: Comprenderá los conceptos de dominio e imagen de una transformación. Distinguirá cuándo una transformación es lineal. Encontrará
Unidad 7 transformaciones lineales Objetivos: Al inalizar la unidad, el alumno: Comprenderá los conceptos de dominio e imagen de una transformación. Distinguirá cuándo una transformación es lineal. Encontrará
Macroeconomía II EAE 211B
 Macroeconomía II EAE 211B Pontificia Universidad Católica de Chile Instituto de Economía Juan Ignacio Urquiza Primer Semestre 2012 Ciclos Económicos Esquema: Introducción a los ciclos: Rol de las rigideces
Macroeconomía II EAE 211B Pontificia Universidad Católica de Chile Instituto de Economía Juan Ignacio Urquiza Primer Semestre 2012 Ciclos Económicos Esquema: Introducción a los ciclos: Rol de las rigideces
UNIVERSIDAD DE AQUINO BOLIVIA INGENIERIA DE TELECOMUNICACIONES COMUNICACIONES CON FIBRA OPTICA: RECEPTORES OPTICOS
 UNIVERSIDAD DE AQUINO BOLIVIA INGENIERIA DE TELECOMUNICACIONES COMUNICACIONES CON FIBRA OPTICA: RECEPTORES OPTICOS INTRODUCCION En esencia un sistema de comunicaciones ópticas es un sistema de comunicaciones
UNIVERSIDAD DE AQUINO BOLIVIA INGENIERIA DE TELECOMUNICACIONES COMUNICACIONES CON FIBRA OPTICA: RECEPTORES OPTICOS INTRODUCCION En esencia un sistema de comunicaciones ópticas es un sistema de comunicaciones
y λu = Idea. Podemos sumar vectores y multiplicar por un escalar. El resultado vuelve a ser un vector Definición de espacio vectorial.
 Espacios vectoriales Espacios y subespacios R n es el conjunto de todos los vectores columna con n componentes. Además R n es un espacio vectorial. Ejemplo Dados dos vectores de R por ejemplo u = 5 v =
Espacios vectoriales Espacios y subespacios R n es el conjunto de todos los vectores columna con n componentes. Además R n es un espacio vectorial. Ejemplo Dados dos vectores de R por ejemplo u = 5 v =
Álgebra Lineal Ma1010
 Álgebra Lineal Ma1010 Mínimos Cuadrados Departamento de Matemáticas ITESM Mínimos Cuadrados Álgebra Lineal - p. 1/34 En esta sección veremos cómo se trabaja un sistema inconsistente. Esta situación es
Álgebra Lineal Ma1010 Mínimos Cuadrados Departamento de Matemáticas ITESM Mínimos Cuadrados Álgebra Lineal - p. 1/34 En esta sección veremos cómo se trabaja un sistema inconsistente. Esta situación es
Lección 24: Lenguaje algebraico y sustituciones
 LECCIÓN Lección : Lenguaje algebraico y sustituciones En lecciones anteriores usted ya trabajó con ecuaciones. Las ecuaciones expresan una igualdad entre ciertas relaciones numéricas en las que se desconoce
LECCIÓN Lección : Lenguaje algebraico y sustituciones En lecciones anteriores usted ya trabajó con ecuaciones. Las ecuaciones expresan una igualdad entre ciertas relaciones numéricas en las que se desconoce
ÍNDICE DISEÑO DE CONTADORES SÍNCRONOS JESÚS PIZARRO PELÁEZ
 ELECTRÓNICA DIGITAL DISEÑO DE CONTADORES SÍNCRONOS JESÚS PIZARRO PELÁEZ IES TRINIDAD ARROYO DPTO. DE ELECTRÓNICA ÍNDICE ÍNDICE... 1 1. LIMITACIONES DE LOS CONTADORES ASÍNCRONOS... 2 2. CONTADORES SÍNCRONOS...
ELECTRÓNICA DIGITAL DISEÑO DE CONTADORES SÍNCRONOS JESÚS PIZARRO PELÁEZ IES TRINIDAD ARROYO DPTO. DE ELECTRÓNICA ÍNDICE ÍNDICE... 1 1. LIMITACIONES DE LOS CONTADORES ASÍNCRONOS... 2 2. CONTADORES SÍNCRONOS...
Teoría de la Comunicación
 Teoría de la Comunicación Enero 2009 Realice cada ejercicio en hojas separadas. No se permite uso de teléfono móvil. Escriba su nombre en todas las hojas. Indique claramente el apartado al que está respondiendo.
Teoría de la Comunicación Enero 2009 Realice cada ejercicio en hojas separadas. No se permite uso de teléfono móvil. Escriba su nombre en todas las hojas. Indique claramente el apartado al que está respondiendo.
1. SOLUCIONES A LOS EJERCICIOS PROPUESTOS
 1 1. SOLUCIONES A LOS EJERCICIOS PROPUESTOS 1.1. ESPACIOS VECTORIALES 1. Analizar cuáles de los siguientes subconjuntos de R 3 son subespacios vectoriales. a) A = {(2x, x, 7x)/x R} El conjunto A es una
1 1. SOLUCIONES A LOS EJERCICIOS PROPUESTOS 1.1. ESPACIOS VECTORIALES 1. Analizar cuáles de los siguientes subconjuntos de R 3 son subespacios vectoriales. a) A = {(2x, x, 7x)/x R} El conjunto A es una
CAN BUS Controller Area Network:
 CAN BUS Controller Area Network: Protocolo de comunicación Serie creado en los 80s por Bosch inicialmente para la comunicación entre controles del automóvil. Reduce el cableado y permite agregar funciones
CAN BUS Controller Area Network: Protocolo de comunicación Serie creado en los 80s por Bosch inicialmente para la comunicación entre controles del automóvil. Reduce el cableado y permite agregar funciones
Potencial eléctrico. du = - F dl
 Introducción Como la fuerza gravitatoria, la fuerza eléctrica es conservativa. Existe una función energía potencial asociada con la fuerza eléctrica. Como veremos, la energía potencial asociada a una partícula
Introducción Como la fuerza gravitatoria, la fuerza eléctrica es conservativa. Existe una función energía potencial asociada con la fuerza eléctrica. Como veremos, la energía potencial asociada a una partícula
PROPIOS. DIAGONALIZACIÓN DE MATRICES CUADRADAS
 Tema 7.- VALORES Y VECTORES PROPIOS. DIAGONALIZACIÓN DE MATRICES CUADRADAS VALORES Y VECTORES PROPIOS MATRICES CUADRADAS DIAGONALIZABLES DIAGONALIZACIÓN N ORTOGONAL DE MATRICES CUADRADAS SIMÉTRICAS 1 Un
Tema 7.- VALORES Y VECTORES PROPIOS. DIAGONALIZACIÓN DE MATRICES CUADRADAS VALORES Y VECTORES PROPIOS MATRICES CUADRADAS DIAGONALIZABLES DIAGONALIZACIÓN N ORTOGONAL DE MATRICES CUADRADAS SIMÉTRICAS 1 Un
FORMA CANONICA DE JORDAN Y ECUACIONES DIFERENCIALES LINEALES A COEFICIENTES CONSTANTES
 FORMA CANONICA DE JORDAN Y ECUACIONES DIFERENCIALES LINEALES A COEFICIENTES CONSTANTES Eleonora Catsigeras 6 de mayo de 997 Notas para el curso de Análisis Matemático II Resumen Se enuncia sin demostración
FORMA CANONICA DE JORDAN Y ECUACIONES DIFERENCIALES LINEALES A COEFICIENTES CONSTANTES Eleonora Catsigeras 6 de mayo de 997 Notas para el curso de Análisis Matemático II Resumen Se enuncia sin demostración
La Lección de hoy es sobre determinar el Dominio y el Rango. El cuál es la expectativa para el aprendizaje del estudiante LF.3.A1.
 LF.3.A1.2-Steve Cole-Determining Domain and Ranges- La Lección de hoy es sobre determinar el Dominio y el Rango. El cuál es la expectativa para el aprendizaje del estudiante LF.3.A1.2 Qué es Dominio? Es
LF.3.A1.2-Steve Cole-Determining Domain and Ranges- La Lección de hoy es sobre determinar el Dominio y el Rango. El cuál es la expectativa para el aprendizaje del estudiante LF.3.A1.2 Qué es Dominio? Es
8. Estimación puntual
 8. Estimación puntual Estadística Ingeniería Informática Curso 2009-2010 Estadística (Aurora Torrente) 8. Estimación puntual Curso 2009-2010 1 / 30 Contenidos 1 Introducción 2 Construcción de estimadores
8. Estimación puntual Estadística Ingeniería Informática Curso 2009-2010 Estadística (Aurora Torrente) 8. Estimación puntual Curso 2009-2010 1 / 30 Contenidos 1 Introducción 2 Construcción de estimadores
Métodos de Inteligencia Artificial
 Métodos de Inteligencia Artificial L. Enrique Sucar (INAOE) esucar@inaoep.mx ccc.inaoep.mx/esucar Tecnologías de Información UPAEP Agentes Inteligentes Definición de Agente Tipos de agentes: Agentes con
Métodos de Inteligencia Artificial L. Enrique Sucar (INAOE) esucar@inaoep.mx ccc.inaoep.mx/esucar Tecnologías de Información UPAEP Agentes Inteligentes Definición de Agente Tipos de agentes: Agentes con
Introducción: Modelos, Escalas y Métricas. Valentin Laime. Calidad de Software
 Calidad de Software: Introducción: Modelos, Escalas y Métricas Valentin Laime Calidad de Software 10/28/2014 1 Modelos Un modelo es una abstracción de la realidad, que permite abstraer detalles y visualizar
Calidad de Software: Introducción: Modelos, Escalas y Métricas Valentin Laime Calidad de Software 10/28/2014 1 Modelos Un modelo es una abstracción de la realidad, que permite abstraer detalles y visualizar
1 Espacios y subespacios vectoriales.
 UNIVERSIDAD POLITÉCNICA DE CARTAGENA Departamento de Matemática Aplicada y Estadística Espacios vectoriales y sistemas de ecuaciones 1 Espacios y subespacios vectoriales Definición 1 Sea V un conjunto
UNIVERSIDAD POLITÉCNICA DE CARTAGENA Departamento de Matemática Aplicada y Estadística Espacios vectoriales y sistemas de ecuaciones 1 Espacios y subespacios vectoriales Definición 1 Sea V un conjunto
8.2.2. Intervalo para la media (caso general)
") 182 Bioestadística: Métodos y Aplicaciones 100 de ellos se obtiene una media muestral de 3 kg, y una desviación típica de 0,5 kg, calcular un intervalo de confianza para la media poblacional que presente
182 Bioestadística: Métodos y Aplicaciones 100 de ellos se obtiene una media muestral de 3 kg, y una desviación típica de 0,5 kg, calcular un intervalo de confianza para la media poblacional que presente
4.- Para los siguientes conjuntos de vectores, probar si son o no subespacios vectoriales de R 4 : 2d + 1 : b, d reales. d
 GRADO EN I. TELEMÁTICA. HOJA : ESPACIOS VECTORIALES. ESPACIOS NULO Y COLUMNA.- Sea W el conjunto de todos los vectores de R de la forma subespacio de R. s + t s t s t t, con s, t R. Probar que W es un.-
GRADO EN I. TELEMÁTICA. HOJA : ESPACIOS VECTORIALES. ESPACIOS NULO Y COLUMNA.- Sea W el conjunto de todos los vectores de R de la forma subespacio de R. s + t s t s t t, con s, t R. Probar que W es un.-
EL DISEÑO FACTORIAL COMPLETO 2 2
 EL DISEÑO FACTORIAL COMPLETO 2 2 Joan Ferré Grupo de Quimiometría y Cualimetría Departamento de Química Analítica y Química Orgánica Universidad Rovira i Virgili (Tarragona) INTRODUCCIÓN Para optimizar
EL DISEÑO FACTORIAL COMPLETO 2 2 Joan Ferré Grupo de Quimiometría y Cualimetría Departamento de Química Analítica y Química Orgánica Universidad Rovira i Virgili (Tarragona) INTRODUCCIÓN Para optimizar
UNIDAD 4 PROCESOS DE MARKOV
 UNIDAD 4 PROCESOS DE MARKOV Anteriormente se han cubierto modelos estáticos, esto es, modelos cuyos parámetros permanecen sin cambio a través del tiempo. Con excepción de programación dinámica donde se
UNIDAD 4 PROCESOS DE MARKOV Anteriormente se han cubierto modelos estáticos, esto es, modelos cuyos parámetros permanecen sin cambio a través del tiempo. Con excepción de programación dinámica donde se
Comente: Los bancos siempre deberían dar crédito a los proyectos rentables. Falso, hay que evaluar la capacidad de pago.
 Explique Brevemente en que consiste el leasing y nombre los diferentes tipos existentes. Es un mecanismo de financiamiento de Activos el cual permite el uso del activo por un periodo determinado a cambio
Explique Brevemente en que consiste el leasing y nombre los diferentes tipos existentes. Es un mecanismo de financiamiento de Activos el cual permite el uso del activo por un periodo determinado a cambio
Descripción y tabla de especificaciones para prueba formativa Área Matemática Año 2014
 Descripción y tabla de especificaciones para prueba formativa Área Matemática Año 2014 Contenidos 1. El referente conceptual de la evaluación... 1 CUADRO 1. TABLA DE ESPECIFICACIONES EN EL ÁREA DE MATEMÁTICA...
Descripción y tabla de especificaciones para prueba formativa Área Matemática Año 2014 Contenidos 1. El referente conceptual de la evaluación... 1 CUADRO 1. TABLA DE ESPECIFICACIONES EN EL ÁREA DE MATEMÁTICA...
Circuito RL, Respuesta a la frecuencia.
 Circuito RL, Respuesta a la frecuencia. A.M. Velasco (133384) J.P. Soler (133380) O.A. Botina (133268) Departamento de física, facultad de ciencias, Universidad Nacional de Colombia Resumen. Se estudia
Circuito RL, Respuesta a la frecuencia. A.M. Velasco (133384) J.P. Soler (133380) O.A. Botina (133268) Departamento de física, facultad de ciencias, Universidad Nacional de Colombia Resumen. Se estudia
Valores y vectores propios de una matriz. Juan-Miguel Gracia
 Juan-Miguel Gracia Índice 1 Valores propios 2 Polinomio característico 3 Independencia lineal 4 Valores propios simples 5 Diagonalización de matrices 2 / 28 B. Valores y vectores propios Definiciones.-
Juan-Miguel Gracia Índice 1 Valores propios 2 Polinomio característico 3 Independencia lineal 4 Valores propios simples 5 Diagonalización de matrices 2 / 28 B. Valores y vectores propios Definiciones.-
ESTIMACIÓN. puntual y por intervalo
 ESTIMACIÓN puntual y por intervalo ( ) Podemos conocer el comportamiento del ser humano? Podemos usar la información contenida en la muestra para tratar de adivinar algún aspecto de la población bajo estudio
ESTIMACIÓN puntual y por intervalo ( ) Podemos conocer el comportamiento del ser humano? Podemos usar la información contenida en la muestra para tratar de adivinar algún aspecto de la población bajo estudio
Introducción a la Teoría del Procesamiento Digital de Señales de Audio
 Introducción a la Teoría del Procesamiento Digital de Señales de Audio Transformada de Fourier Resumen el análisis de Fourier es un conjunto de técnicas matemáticas basadas en descomponer una señal en
Introducción a la Teoría del Procesamiento Digital de Señales de Audio Transformada de Fourier Resumen el análisis de Fourier es un conjunto de técnicas matemáticas basadas en descomponer una señal en
Ejemplo: Ing. Raúl Canelos. Solución CONFIABILIDAD SEP 1
 Ejemplo: Basándose en ciertos estudios una compañía a clasificado de acuerdo con la posibilidad de encontrar petróleo en tres tipos de formaciones. La compañía quiere perforar un pozo en determinado lugar
Ejemplo: Basándose en ciertos estudios una compañía a clasificado de acuerdo con la posibilidad de encontrar petróleo en tres tipos de formaciones. La compañía quiere perforar un pozo en determinado lugar