Resolución de ecuaciones no lineales
|
|
|
- Carolina Sánchez Escobar
- hace 7 años
- Vistas:
Transcripción
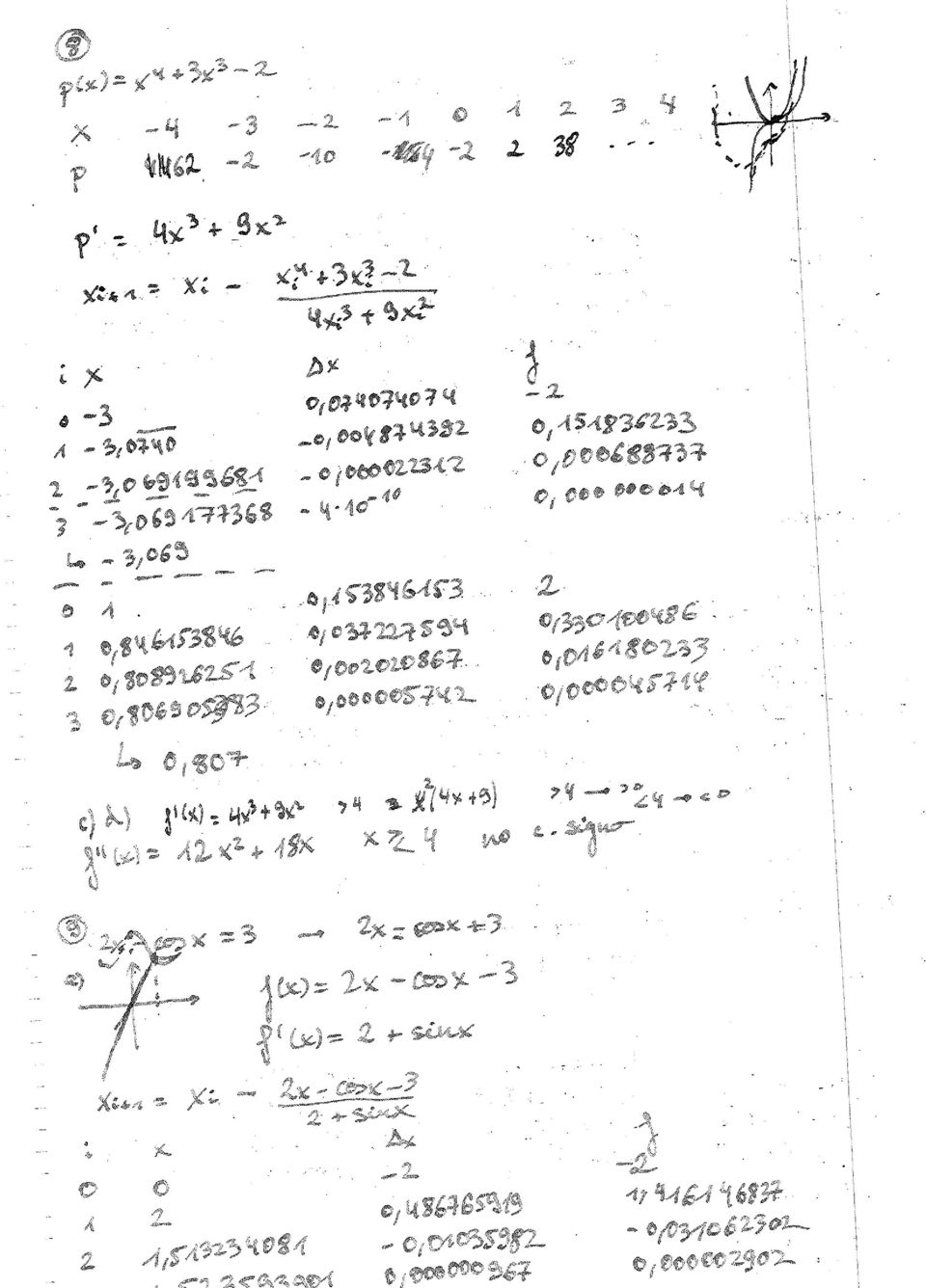
1 Problemas de Cálculo Numérico Resolución de ecuaciones no lineales 1. Aplicar el método de Newton-Raphson para determinar la raiz cuadrada de 50. Deducir la expresión o fórmula de Newton para raíces cuadradas. 2. Deducir la fórmula de Newton para el cálculo de raíces cúbicas. Aplicarlo al cálculo de la raiz de Resuelva la ecuación log(2 x 2 ) x 2 = 0 usando el método de Newton-Raphson partiendo de x 0 = 1 y hallando la raiz con una precisión de Determine con un error absoluto menor de la solución de la ecuación x cos x = Resuelva mediante el método de Newton-Raphson la ecuación: f(x) = 1 + log x 1 log x 2 = 0 partiendo de x 0 = 1 e iterando hasta que el error sea menor de Determinar la solución exacta y comparar con el resultado numérico. 6. Una esfera de densidad ρ y radio r tiene una masa de 4 3 πr3 ρ. El volumen de un segmento esférico viene dado por 1 3 π(3rh2 h 3 ). Mediante el método de Newton-Raphson calcular la profundidad a la cual se hunde una esfera de densidad 0.6 en el agua como fracción de su radio. Obtener una precisión mejor del 0.1% en el cálculo. 7. Resuelva la ecuación f(x) = e ex 5 = 0 mediante el método de Newton-Raphson partiendo del punto x 0 = 1 de forma que la precisión de la raiz sea mejor que Considérese el polinomio p(x) = x 4 + 3x 3 2 del que queremos obtener las raíces contenidas en el intervalo [ 4, 4]. Para ello: (a) Calcule los valores del polinomio para x entre -4 y 4 con paso unidad. (b) A partir de la tabla anterior encuentre puntos de partida adecuados para llevar a cabo el método de Newton-Raphson. (c) Determine las raíces con error absoluto menor de (d) Puede haber raíces para x < 4? (e) Puede haber raíces para x > 4? 9. Considere la ecuación: 2x cos x = 3 (a) Demostrar que esta ecuación tiene una sola raiz. (b) Determinar el valor de la raiz mediante el método de Newton-Raphson, partiendo del punto x = 0 y haciendo las iteraciones necesarias para que el error sea menor que Usando el método de Regula Falsi resuelva la ecuación x+tan x = 0 partiendo del intervalo [1.9, 2.1], iterando hasta que la solución tenga una precisión absoluta de Repetir el cáculo pero usando el método de Newton Raphson partiendo de x = 1.7 hasta alcanzar una precisión de

2 Problemas de Cálculo Numérico 11. Resolver mediante el método de Newton la ecuación no lineal x 2 exp( x) = 0 con una precisión numérica de 10 5, partiendo de x 0 = Sea el polinomio x 3 2x 2 + 4x 4 (a) Encontrar una raíz de dicho polinomio con una precisión de (b) Demostrar analíticamente que es la única raíz del polinomio.
 Encontrar una raíz de dicho polinomio con una")
3

4

5

6

7
8

9

10 Problemas de Cálculo Numérico Sistemas Lineales 1. Descomponer mediante el método LU las siguientes matrices: A = ; B = Sean los siguientes sistemas de ecuaciones: 2x 1 4x 2 4x 3 = 2 2x 1 + 4x 2 2x 3 = 4 x 1 x 2 + x 3 = 0 2x 1 x 2 + x 3 = 1 3x 1 + 3x 2 + 9x 3 = 0 3x 1 + 3x 2 + 5x 3 = 4 (a) Obtener la descomposición LU de la matriz. (b) Resolver el sistema. 3. Calcular la inversa de la matriz: A = Dada la siguiente matriz triangular superior determinar su matriz inversa: A = La descomposición LU de una matriz viene dada, en forma empaquetada, por: A = En la determinación de esta descomposición no se hizo ningún intercambio de filas. (a) Determínese la matriz original. (b) Resuélvase el problema lineal asociado a esta matriz para un vector de términos independientes. (c) Compruébese el resultado. x = 6. Tenemos una matriz 3 3 descompuesta en la forma LU. En forma empaquetada dicha matriz es A = y para su obtención se hizo la siguiente reordenación de filas:

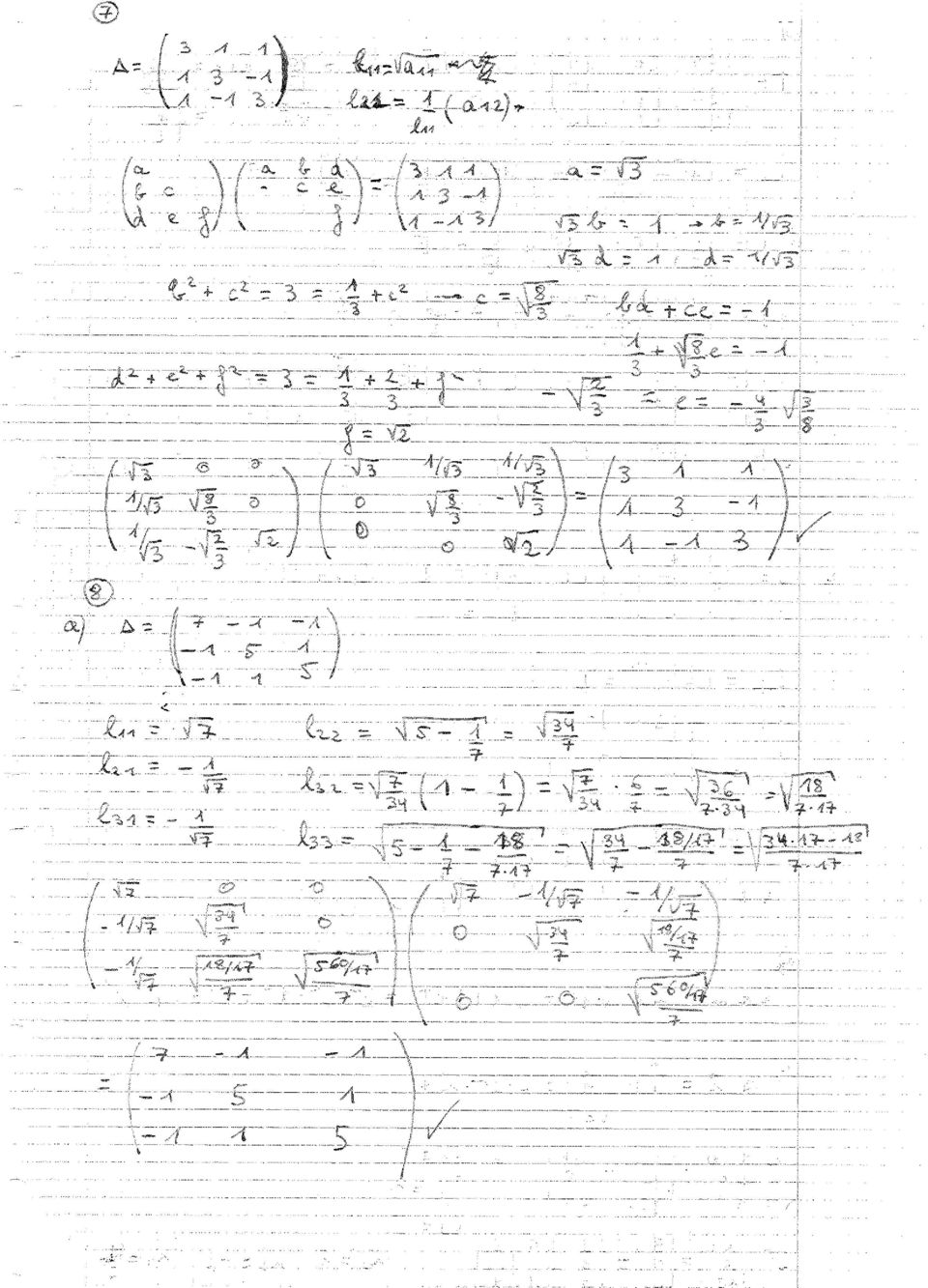
11 Problemas de Cálculo Numérico Fila por fila (a) Obtenga la matriz original. (b) Resuelva el sistema lineal de ecuaciones asociado a un vector columna de términos independientes: (c) Compruebe que la solución está bien. x = Determínese la descomposición de Cholesky para la matriz A = y compruébese el resultado. 8. Sea la matriz: A = ; B = Obténgase la descomposición de la misma mediante el método de Cholesky ( L L T = A). 9. Dada la siguiente matriz: A = (a) Obtener la descomposición de Cholesky de la matriz. (b) Calcular el determinante utilizando dicha descomposición. (c) Resolver el sistema Ax = b donde b = (16, 8, 6) T. 10. Dada la siguiente matriz: A = (a) Obtener la descomposición de Cholesky de la matriz. (b) Calcular el determinante utilizando dicha descomposición. (c) Resolver el sistema Ax = b donde b = (5, 13, 76) T.
. 9.")
12

13

14

15

16

17

18

19

20
21
22 Problemas de Cálculo Numérico Valores y vectores propios 1. Realizar una iteración del método de Jacobi en las siguientes matrices: A = ; B = Realizar dos iteraciones del método de Jacobi en la siguiente matriz: A = Considérese la matriz simétrica: A = Hácer una rotación de Jacobi para anular el término a Aplicar dos rotaciones de Jacobi a la siguiente matriz Escribir el resultado de cada iteración y la matriz de rotación correspondiente. 5. Diagonalizar por Jacobi la siguiente matriz Escribir el resultado de cada iteración y la matriz de rotación correspondiente. 6. Aplicar dos rotaciones de Jacobi a la siguiente matriz: A = Escribir el resultado de cada iteracción y la matriz de rotación correspondiente. 7. Aplicar dos rotaciones de Jacobi a la siguiente matriz: A = Al diagonalizar una matriz A por el método de Jacobi procedemos a realizar una rotación en el plano pq, con el fin de anular el elemento a pq. De las siguientes proposiciones indicar cuales son verdaderas y cuales son falsas, justificando la respuesta: (a) Tras la rotación, la suma de los elementos diagonales de la matriz permanece constante. (b) La rotación sólo se puede llevar a cabo si a pp a qq (c) El módulo de cada uno de los elementos no diagonales siempre disminuye o se queda igual, tras la mencionada rotación.
23
24
25
26
27
28
29
30
31 Problemas de Cálculo Numérico Interpolación 1. Dada la siguiente tabla de valores: x f(x) encuentre el valor de la función para x = 1.5 mediante: (a) Interpolación de Lagrange tomando dos puntos, tres puntos y cuatro puntos. (b) Construir la tabla de diferencias divididas de Newton y obtener los resultados del apartado anterior. (c) Mediante el algoritmo de Neville. 2. Considerar la siguiente tabla de datos de la función f(x) = e x. x i f i Obtener una cota del error cometido debido a la interpolación polinómica efectuada cuando aproximamos el valor de e 1/3. 3. Dada la siguiente tabla de valores x f(x) encuentre el valor de la función para x = 1.5 utilizando todos los puntos de la tabla, mediante el algoritmo de Neville. 4. Escriba los polinomios de interpolación de Lagrange y Newton para los siguientes datos: x f(x) Escriba ambos polinomios en la forma ax 2 + bx + c para verificar que se trata de la misma función. 5. Determínese explicitamente el valor del polinomio interpolador de tercer grado que pasa por los puntos (0,1), (1,2), (2,1) y (3,-1). 6. Para una cierta función conocemos las siguientes diferencias divididas de Newton: f[4] = 37, f[2, 4] = 19, f[1, 2, 4] = 8 y f[ 1, 1, 2, 4] = 2. (a) Obtener el polinomio interpolador P (x) de grado 3 para los puntos de interpolaciónn x 0 = 1, x 1 = 1, x 2 = 2, x 3 = 4 (b) Usar la interpolaciónn polinomica para encontrar el valor de f(0) (c) Suponiendo que sabemos que f (4) (x) < para 1 x 4, encontrar una cota superior al error en la estimación anterior de f(0). 7. Utilizar una Spline cúbica natural para encontrar una aproximación a: f(2.5) dados los siguientes datos:
32 Problemas de Cálculo Numérico x f(x) Utilizar una Spline cúbica natural para encontrar una aproximación a f(1.25) dados los siguientes datos: x f(x) Calcular una aproximación de f(2.5) por interpolación de la tabla: (a) Utilizando interpolación de Lagrange (b) Utilizando diferencias divididas (c) Mediante el algoritmo de Neville (d) Utilizando un spline cúbico natural 10. Dada la siguiente tabla de datos: x f(x) θ tan(θ) calcular la tangente de 39 mediante el método de las diferencias divididas de Newton. 11. Dada la siguiente tabla de valores x f(x) encuentre el valor de la función para x = 1.5 utilizando todos los puntos de la tabla, utilizando el algoritmo de Neville. 12. Construir una Spline cúbica natural para aproximar f(x) = e x utilizando los valores dados por f(x) en x = 0, 0.25, 0.75, 1.0. Integrar la Spline en el intervalo [0,1] y comparar con el resultado exacto. Utilizando las derivadas de la Spline obtener una estimación de f (0.5) y f (0.5) y comparar con los valores exactos. 13. Dada la siguiente tabla de datos: x f(x) (a) Utilizar una spline cúbica natural para encontrar una aproximación a f(1.5). (b) Si los datos de la tabla han sido obtenidos mediante el polinomio cúbico f(x) = x 3 2, Cómo es posible que, aún siendo una spline cúbica, no se obtenga el resultado correcto? (c) Qué condición de contorno hay que imponer para asegurar que la spline reproduzca la función original? Compruébese calculando la spline con dicha condición.
33
34
35
36
37
38
39
40
41
42
43
44
45
46 Problemas de Cálculo Numérico Derivación e integración numérica 1. Sea la función f(x) = (x). Calcúlese f (x) en x = 1 numéricamente, aplicando el método de extrapolación de Richardson (extrapolación al límite) a las derivadas numéricas con pasos h = 0.8, 0.4 y 0.2 En qué factor mejora el error la extrapolación de Richardson con respecto al valor obtenido con h = 0.2? 2. Calcular la derivada primera de tan(x) en x = 1 por el método de extrapolación de Richardson, utilizando h = 0.1, 0.2, 0.4 y dos pasos de extrapolación. Comparar con el valor exacto. 3. Calcular la integral 1 0 ex dx mediante la regla trapezoidal repetida con pasos h = 1, h = 0.5, h = 0.25 y h = Repetir el cálculo utilizando la regla de Simpson con pasos h = 0.5 y h = Determínese el valor de la integral I = 1 2π 2π 0 ( ) sin(x) exp dx 2 mediante la regla trapezoidal con pasos de integración h = π/2 y h = π/4. Mejórese el resultado mediante la extrapolación de Richardson (extrapolación al límite) y hágase una estimación del error. 5. Obténgase la fórmula de integración de Bode x4 x 0 f(x)dx = 2h 45 [7f f f f 3 + 7f 4 ] con x n = x 0 + nh, a partir de la regla trapezoidal con pasos h, 2h y 4h, y la extrapolación de Richardson. 6. Dedúzcase la regla de integración de Simpson mediante el siguiente procedimiento (Método de los coeficientes indeterminados): (a) Supóngase la fórmula 2h 0 f(x)dx af(0) + bf(h) + cf(2h) (b) Determínese a, b y c exigiendo que la ecuación aproximada anterior se cumpla exacta para los casos en que f(x) = 1, f(x) = x y f(x) = x 2 7. Un cuerpo está sometido a la fuerza conservativa F (x) = x 1 x y se desplaza desde la posición x = 1 hasta x = 1.8. Usando la regla trapezoidal determinar el trabajo realizado usando pasos de valor 0.2, 0.4 y 0.8 y haciendo todas las extrapolaciones de Richardson posibles. Obténgase también una estimación del error del mejor resultado. 8. Determínese el valor de la integral: I = 1 0 sin(x) x dx mediante la regla trapezoidal y las adecuadas extrapolaciones de Richardson y hágase una estimación del error del mejor resultado. 9. Se desea determinar una regla de integración numérica de dos puntos, de forma que se tenga la relación aproximada: +1 1 f(x)dx w 1 f(x 1 ) + w 2 f(x 2 )
47 Problemas de Cálculo Numérico Deben encontrarse los valores de {x 1, x 2 } y {w 1, w 2 } con el fin de que la mencionada fórmula sea exacta para polinomios de grado 0, 1, 2 y 3. Determinada dicha fórmula, aplíquese al cálculo de la integral +1 1 e x dx y compárese con el resultado obtenido mediante la regla de Simpson (h = 1). 10. Calcular la integral 1 0 sinh(x) dx x mediante la regla trapezoidal con 1, 2 y 4 intervalos seguida de las extrapolaciones de Richardson a orden h 2 y h Se desea determinar una regla de integración especializada para calcular integrales del tipo: π 2 expresando el resultado mediante la forma: 0 sin(x) f(x)dx π 2 0 sin(x) f(x)dx = w 0 f(0) + w 1 f( π 4 ) + w 2f( π 2 ) Para obtener los pesos imponemos la condición de que la regla de integración sea exacta cuando f(x) = 1, f(x) = x y f(x) = x 2. Determinar los pesos w 0, w 1 y w 2 y aplicar la regla al cálculo de la integral: y comparar con el valor exacto. π 2 0 sin(x) e x dx 12. Una cierta integral definida calculada mediante la regla trapezoidal con distintos valores para el número de intervalos arroja los siguientes resultados: Num. intervalos Regla Trapezoidal Use la extrapolación de Richardson para obtener el mejor valor posible de la integral y una estimación del error de dicho valor. 13. Se quiere hacer una integral definida de una cierta función f(x), cuyos valores se dan en la tabla que sigue: x f(x) Con estos datos se puede calcular la integral mediante la regla trapezoidal para varios casos: con 1 intervalo, con 2 intervalos, con 3 intervalos y con 6 intervalos. Obtenga los valores de estas aproximaciones a la integral y el tablero de todas las extrapolaciones de Richardson posibles, indicando finalmente el valor de la mejor estimación numérica y su error.
48 Problemas de Cálculo Numérico 14. Realizar una estimación de la función error para x = 1 mediante el método de integración de Romberg comenzando con paso h = 1 y realizando tres extrapolaciones. erf(x) = 2 x e t2 dt π 15. Estimar la probabilidad de una distribución normal de media nula y varianza unidad entre x = -1 y x = 1 mediante el método de Romberg, utilizando la regla trapezoidal con 1, 2 y 4 subintervalos. 0
49
50
51
52
53
54
55
56
57
58
59
60
61 Problemas de Cálculo Numérico Modelado de datos experimentales 1. Ajuste, minimizando la función χ 2, la curva y = A + Be x2 a la tabla de datos: x y σ Como resultado debe presentar los valores de los parámetros ajustados, sus errores y el valor de χ 2. Es un ajuste aceptable? 2. Dada la tabla de datos experimentales: x y σ determine los parámetros A y B de la función F (x) = Ax 2 Be x que dan el χ 2 mínimo. Determine también: (a) El valor del χ 2 del ajuste. (b) Si el ajuste es aceptable o no. (c) El error de los parámetros ajustados. 3. Determínense los parámetros a y b que ajustan a la tabla de datos de la curva y = ax + be x2 2 Obténgase también el valor de χ 2 y los errores con que se determinan los parámetros. Se trata de un buen ajuste? x f(x) σ Determínense los parámetros a y b que ajustan a la tabla de datos de la curva y = a + b sin(x). Obténgase también el valor de χ 2 y los errores con los que se determinan los parámetrso. Hágase una representación gráfica de los valores ajustados, así como de los empíricos.
62 Problemas de Cálculo Numérico x f(x) σ Sospechamos que el conjunto de datos experimentales: x y σ puede ser descrito por una ley exponencial de la forma y = ae bx. Se trata de realizar un ajuste por mínimos cuadrados a dichos datos, obteniendo los parámetros a y b con su error así como el valor de χ 2. Cuan bueno es el ajuste? 6. Se desea ajustar la función modelo y = ax 2 + b al conjunto de datos especificado en la tabla que sigue. Para hacer que el ajuste sea lineal, háganse las transformaciones adecuadas de la función y la variable, así como de los errores, y complétese la tabla. (a) Obtener la trasformación de la función. (b) Obtener la trasformación de los errores. (c) Parámetros del ajuste con sus errores. (d) Matriz de covarianzas. (e) Es un buen ajuste? x i y i σ i x i y i σ i Un oscilador armónico libre amortiguado de frecuencia propia ω = 0.5 radianes/s satisface la ecuación del movimiento x = Ae γt cos(ωt). Se miden los siguientes valores de x y t t (s) x ± m Calcular la amplitud inicial A y la constante de amortiguamiento γ mediante ajuste de mínimos cuadrados, minimizando χ 2. (Nota: Para pasar obtener un problema lineal es necesario pasar de la variable x a una nueva variable y, de forma que los parámetros no dependan del tiempo.)
63 Problemas de Cálculo Numérico 8. Sabemos que un muelle se comporta como un oscilador anarmónico, que satisface la siguiente relación entre fuerza y elongación: F (x) = kx αx 2 Se suspende el muelle en posición vertical fijando un extremo a un soporte y en el otro se cuelga un platillo en el que se colocan diferentes pesas. Las elongaciones se miden con una precisión de 1 mm, lo que es equivalente a una sensibilidad de 20 g al valor de la masa. Se obtienen los siguientes valores de la elongación en función de la masa: m(g) x(mm) (a) Plantear las ecuaciones normales que dan los valores óptimos de los parámetros k y α (mínimos cuadrados) ajustando mediante polinomios ortogonales sobre este conjunto discreto de puntos. Tomar errores sólo en la variable dependiente (la fuerza). (b) Calcular los valores de dichos parámetros, expresándolos en las unidades correspondientes. Tomar la aceleración de la gravedad como g=10 m/s 2. (c) Calcular el valor de χ 2. Se obtiene un buen ajuste?
64
65
66
67
68
69
70
71
72 Problemas de Cálculo Numérico Ecuaciones diferenciales 1. Considérese la ecuación de movimiento d 2 x dt 2 = x2 con las condiciones iniciales x(t = 0) = 0 y v(t = 0) = 10. Determínese la posición y la velocidad para t = 1, usando la regla poligonal de Euler con paso h = Una partícula de 1 Kg de masa se mueve, partiendo del origen, con una velocidad inicial de 10 m/s, y está sometida a una fuerza repulsiva combinada con otra de tipo viscoso dada por la expresión siendo α = 1 N/m 2 y β = Kg/m. F = αx 2 βv 2 (a) Escríbase la ecuación diferencial que describe su movimiento. (b) Transfórmese en un sistema de dos ecuaciones diferenciales de primer grado. (c) Escríbanse las fórmulas de integración para el método de la poligonal de Euler. (d) Determínese su movimiento rellenando la tabla adjunta 3. Considérese la ecuación diferencial t x v αx 2 βv dy dt = 1 1 t 4 con la condición de contorno y(0) = 0. Intégrese esta ecuación diferencial hasta t = 0.5 con pasos T = 0.1, usando el método de Euler. Compárese el resultado con la evaluación numérica de la integral por la regla trapezoidal con paso 0.1. y(0.5) = dt 1 t 4 4. La trayectoria de un móvil, a lo largo de una línea recta se describe por la ecuación de Newton d 2 x dt 2 Partiendo del punto x = 1 con velocidad inicial v = 1 Cuánto tiempo transcurrirá hasta que el móvil llegue al punto x = 2? Utilícese el método de Euler con pasos de x = Integre la ecuación diferencial = x2 dy dt = y(t) et usando el método predictor-corrector para los valores de t = 0.1, 0.2,..., 1 partiendo de la condición inicial y(t = 0) = 1.
73 Problemas de Cálculo Numérico 6. Considérese la ecuación diferencial y = y con la condición de contorno y(0) = 9. Calcule el valor de y(1) usando el método del punto medio, con dos y cuatro subdivisiones del intervalo. A continuación, haga la extrapolación de Richardson, para obtener un valor mejor. Compare los distintos resultados con la solución analítica de la mencionada ecuación diferencial. 7. Dada la ecuación diferencial con las condiciones de contorno para t = 1 d 2 x dt 2 = t2 x(1) = 4/3 ; ; dx(1) dt = 8/3 lleve a cabo un paso de integración de valor h = 0.1 usando el método de Euler y el método predictor-corrector. 8. Consideremos el problema de valor inicial y = x 2 + y con la condición de contorno y(0) = 1, cuya solución exacta es y(x) = 3e x x 2 2x 2. Tomando una longitud de paso h = 0.1, obtener una aproximación de y(0.3) y calcular el error cometido aplicando el método de Runge-Kutta de cuarto orden. 9. Considere la ecuación diferencial dx dt = x t 2 con la condición de contorno x(1) = 1/e, en el punto t = 1. Obtenga numéricamente el valor de x(2) usando el método de Bulirsch-Stoer, dando DOS pasos intermedios 10. Una partícula de masa 1 Kg está sometida a una fuerza dependiente de la posición F = x 0.5x x 3. En t = 0, su posición es 1 m y su velocidad nula. Calcular su posición en t = 0.3 s integrando la ecuación diferencial correspondiente utilizando el método del punto medio (u otro método con error en h del mismo orden o más elevado). Tomar h = 0.1 s. 11. El método de Runge Kutta de orden 4 aplicado a ecuaciones de la forma y = f(t) coincide con la regla de Simpson. Considérese la ecuación diferencial: con la condición de contorno y(0) = 1. dy dt = t e t (a) Calcúlese y(1) mediante el método de Runge-Kutta de orden 4 con pasos de tamaño h = 0.5. (b) Calcúlese y(1) mediante la regla de Simpson compuesta con tamaño del intervalo de h = 0.25 (c) Razónese la coincidencia del resultado. 12. Realizar 5 pasos de integración para la ecuación diferencial y (t) = y(t) con las condiciones iniciales y(0) = 1, y (0) = 0 con un paso de integración h = 0.1 por el método del punto medio. Comparar con la solución exacta y(t) = cos(t)
74 Problemas de Cálculo Numérico 13. Sea la ecuación diferencial de un cuerpo sometido a una aceleración constante a: con las condiciones iniciales y(0) = y 0, y (0) = v 0 y (t) = a (a) Reducir esta ecuación diferencial a un sistema de ecuaciones diferenciales de primer orden. (b) Realizar un paso de integración de tamaño h por el método del punto medio o el de Runge- Kutta de segundo orden. (c) Interpretar el resultado en términos de las leyes de la cinemática Cúal es el error de truncado del método en este caso? 14. Sea un oscilador armónico amortiguado y forzado descrito por la ecuación diferencial con las condiciones iniciales x(0) = 1 y ẋ(0) = 0. d 2 x dt 2 + dx dt + x = sin(t) (a) Reducir la ecuación diferencial a un sistemas de ecuaciones diferenciales de primer orden. (b) Realizar dos pasos de integración por el método de Euler con h = 0.1. (c) Realizar un paso de integración por el método de Runge-Kutta con h = Sea un péndulo simple de masa 1 Kg, suspendido de un hilo de longitud l = 1 m, que parte del reposo desde un ángulo de 90 con la vertical. (a) Plantear las ecuaciones del movimiento exactas (sin hacer la aproximación sin θ θ, donde θ es el ángulo del péndulo con la vertical), en la forma de dos ecuaciones diferenciales de primer orden para el ángulo θ y la velocidad angular ω (o para la longitud de arco y la velocidad lineal, es indiferente). (b) Realizar tres pasos de integración mediante la regla del punto medio con h = 0.1 s (se toma el tiempo inicial t = 0). (c) Calcular las energías potencial y cinética en t = 0.3 s a partir de la posición y la velocidad obtenidas numéricamente Se conserva la energía mecánica? Razonad la respuesta. Nota: La relación entre la longitud de arco s y el ángulo θ es s = lθ (el ángulo en radianes), la misma que entre velocidad lineal y angular v = lω. La fuerza en la dirección tangencial es F = mg sin θ. Si el origen de potencial V = 0 se toma en θ = π, la energía potencial es V = mgl cos θ. 2
75
76
77
78
79
80
81
82
83
84
E.T.S. Minas: Métodos Matemáticos Ejercicios Tema 2 Aproximación e interpolación
 E.T.S. Minas: Métodos Matemáticos Ejercicios Tema 2 Aproximación e interpolación Francisco Palacios Escuela Politécnica Superior de Ingeniería de Manresa Universidad Politécnica de Cataluña Curso 2006/07
E.T.S. Minas: Métodos Matemáticos Ejercicios Tema 2 Aproximación e interpolación Francisco Palacios Escuela Politécnica Superior de Ingeniería de Manresa Universidad Politécnica de Cataluña Curso 2006/07
F2 Bach. Movimiento armónico simple
 F Bach Movimiento armónico simple 1. Movimientos periódicos. Movimientos vibratorios 3. Movimiento armónico simple (MAS) 4. Cinemática del MAS 5. Dinámica del MAS 6. Energía de un oscilador armónico 7.
F Bach Movimiento armónico simple 1. Movimientos periódicos. Movimientos vibratorios 3. Movimiento armónico simple (MAS) 4. Cinemática del MAS 5. Dinámica del MAS 6. Energía de un oscilador armónico 7.
Matemáticas Febrero 2013 Modelo A
 Matemáticas Febrero 0 Modelo A. Calcular el rango de 0 0 0. 0 a) b) c). Cuál es el cociente de dividir P(x) = x x + 9 entre Q(x) = x +? a) x x + x 6. b) x + x + x + 6. c) x x + 5x 0.. Diga cuál de las
Matemáticas Febrero 0 Modelo A. Calcular el rango de 0 0 0. 0 a) b) c). Cuál es el cociente de dividir P(x) = x x + 9 entre Q(x) = x +? a) x x + x 6. b) x + x + x + 6. c) x x + 5x 0.. Diga cuál de las
MOVIMIENTO ARMÓNICO AMORTIGUADO
 MOVIMIENTO ARMÓNICO AMORTIGUADO OBJETIVO Medida experimental de la variación exponencial decreciente de la oscilación en un sistema oscilatorio de bajo amortiguamiento. FUNDAMENTO TEÓRICO A) SISTEMA SIN
MOVIMIENTO ARMÓNICO AMORTIGUADO OBJETIVO Medida experimental de la variación exponencial decreciente de la oscilación en un sistema oscilatorio de bajo amortiguamiento. FUNDAMENTO TEÓRICO A) SISTEMA SIN
1. Hallar el número de operaciones en la evaluación de un polinomio p n (x) = a 0 + a 1 x + + a n x n por el método estándar y el de Horner.
 = a 0 + a 1 x + + a n x n por el método estándar y el de Horner.") Interpolación. Hallar el número de operaciones en la evaluación de un polinomio p n () = a + a + + a n n por el método estándar y el de Horner.. Hallar el polinomio de interpolación de Lagrange y de Newton
Interpolación. Hallar el número de operaciones en la evaluación de un polinomio p n () = a + a + + a n n por el método estándar y el de Horner.. Hallar el polinomio de interpolación de Lagrange y de Newton
Métodos Numéricos Grado en Informática Tema 5: Diferenciación e Integración Numérica
 Métodos Numéricos Grado en Informática Tema 5: Diferenciación e Integración Numérica Luis Alvarez León Univ. de Las Palmas de G.C. Luis Alvarez León () Métodos Numéricos Univ. de Las Palmas de G.C. 1 /
Métodos Numéricos Grado en Informática Tema 5: Diferenciación e Integración Numérica Luis Alvarez León Univ. de Las Palmas de G.C. Luis Alvarez León () Métodos Numéricos Univ. de Las Palmas de G.C. 1 /
7. Forma de Lagrange para el polinomio interpolador. 9. Forma de Newton para el polinomio interpolador
 Métodos Numéricos: Resumen y ejemplos Tema 2: Aproximación e interpolación Francisco Palacios Escuela Politécnica Superior de Ingeniería de Manresa Universidad Politécnica de Cataluña Febrero 2008, Version
Métodos Numéricos: Resumen y ejemplos Tema 2: Aproximación e interpolación Francisco Palacios Escuela Politécnica Superior de Ingeniería de Manresa Universidad Politécnica de Cataluña Febrero 2008, Version
Problemas Ampliación de Matemáticas. Sistemas lineales 1.- Encontrar la factorización L U de las siguientes matrices:
 Problemas Ampliación de Matemáticas. Sistemas lineales 1.- Encontrar la factorización L U de las siguientes matrices: 5 2 1 1 0 3 1 0 3 3 1 6. 3 1 6 5 2 1 2.- Dada la matriz A = 10 7 8 7 5 6, 8 6 10 hallar
Problemas Ampliación de Matemáticas. Sistemas lineales 1.- Encontrar la factorización L U de las siguientes matrices: 5 2 1 1 0 3 1 0 3 3 1 6. 3 1 6 5 2 1 2.- Dada la matriz A = 10 7 8 7 5 6, 8 6 10 hallar
Ejercicios resueltos
 Ejercicios resueltos Boletín 3 Movimiento armónico simple Ejercicio Una partícula que vibra a lo largo de un segmento de 0 cm de longitud tiene en el instante inicial su máxima velocidad que es de 0 cm/s.
Ejercicios resueltos Boletín 3 Movimiento armónico simple Ejercicio Una partícula que vibra a lo largo de un segmento de 0 cm de longitud tiene en el instante inicial su máxima velocidad que es de 0 cm/s.
N = {1, 2, 3, 4, 5,...}
 Números y Funciones.. Números Los principales tipos de números son:. Los números naturales son aquellos que sirven para contar. N = {,,, 4, 5,...}. Los números enteros incluyen a los naturales y a sus
Números y Funciones.. Números Los principales tipos de números son:. Los números naturales son aquellos que sirven para contar. N = {,,, 4, 5,...}. Los números enteros incluyen a los naturales y a sus
Grado en Química Bloque 1 Funciones de una variable
 Grado en Química Bloque Funciones de una variable Sección.7: Aproximación de funciones. Desarrollo de Taylor. Aproximación lineal. La aproximación lineal de una función y = f(x) en un punto x = a es la
Grado en Química Bloque Funciones de una variable Sección.7: Aproximación de funciones. Desarrollo de Taylor. Aproximación lineal. La aproximación lineal de una función y = f(x) en un punto x = a es la
Métodos Numéricos: Resumen y ejemplos Tema 5: Resolución aproximada de ecuaciones
 Métodos Numéricos: Resumen y ejemplos Tema 5: Resolución aproximada de ecuaciones Francisco Palacios Escuela Politécnica Superior de Ingeniería de Manresa Universidad Politécnica de Cataluña Abril 009,
Métodos Numéricos: Resumen y ejemplos Tema 5: Resolución aproximada de ecuaciones Francisco Palacios Escuela Politécnica Superior de Ingeniería de Manresa Universidad Politécnica de Cataluña Abril 009,
Más ejercicios y soluciones en fisicaymat.wordpress.com
 OSCILACIONES Y ONDAS 1- Todos sabemos que fuera del campo gravitatorio de la Tierra los objetos pierden su peso y flotan libremente. Por ello, la masa de los astronautas en el espacio se mide con un aparato
OSCILACIONES Y ONDAS 1- Todos sabemos que fuera del campo gravitatorio de la Tierra los objetos pierden su peso y flotan libremente. Por ello, la masa de los astronautas en el espacio se mide con un aparato
Problemas de Física 1 o Bachillerato
 Problemas de Física 1 o Bachillerato Conservación de la cantidad de movimiento 1. Calcular la velocidad de la bola m 2 después de la colisión, v 2, según se muestra en la siguiente figura. El movimiento
Problemas de Física 1 o Bachillerato Conservación de la cantidad de movimiento 1. Calcular la velocidad de la bola m 2 después de la colisión, v 2, según se muestra en la siguiente figura. El movimiento
Ampliación de Matemáticas y Métodos Numéricos
 Ampliación de Matemáticas y Métodos Numéricos Relación de ejercicios. Introducción a los Métodos Numéricos Ej. El problema del cálculo del punto de corte de dos rectas con pendiente similar es un problema
Ampliación de Matemáticas y Métodos Numéricos Relación de ejercicios. Introducción a los Métodos Numéricos Ej. El problema del cálculo del punto de corte de dos rectas con pendiente similar es un problema
Práctica 2 Métodos de búsqueda para funciones de una variable
 Práctica 2 Métodos de búsqueda para funciones de una variable Introducción Definición 1. Una función real f se dice que es fuertemente cuasiconvexa en el intervalo (a, b) si para cada par de puntos x 1,
Práctica 2 Métodos de búsqueda para funciones de una variable Introducción Definición 1. Una función real f se dice que es fuertemente cuasiconvexa en el intervalo (a, b) si para cada par de puntos x 1,
P. A. U. LAS PALMAS 2005
 P. A. U. LAS PALMAS 2005 OPCIÓN A: J U N I O 2005 1. Hallar el área encerrada por la gráfica de la función f(x) = x 3 4x 2 + 5x 2 y la rectas y = 0, x = 1 y x = 3. x 3 4x 2 + 5x 2 es una función polinómica
P. A. U. LAS PALMAS 2005 OPCIÓN A: J U N I O 2005 1. Hallar el área encerrada por la gráfica de la función f(x) = x 3 4x 2 + 5x 2 y la rectas y = 0, x = 1 y x = 3. x 3 4x 2 + 5x 2 es una función polinómica
MATE 3031. Dr. Pedro Vásquez UPRM. P. Vásquez (UPRM) Conferencia 1 / 77
 Conferencia 1 / 77") MATE 3031 Dr. Pedro Vásquez UPRM P. Vásquez (UPRM) Conferencia 1 / 77 P. Vásquez (UPRM) Conferencia 2 / 77 Qué es una función? MATE 3171 En esta parte se recordará la idea de función y su definición formal.
MATE 3031 Dr. Pedro Vásquez UPRM P. Vásquez (UPRM) Conferencia 1 / 77 P. Vásquez (UPRM) Conferencia 2 / 77 Qué es una función? MATE 3171 En esta parte se recordará la idea de función y su definición formal.
Tema 1. Cálculo diferencial
 Tema 1. Cálculo diferencial 1 / 57 Una función es una herramienta mediante la que expresamos la relación entre una causa (variable independiente) y un efecto (variable dependiente). Las funciones nos permiten
Tema 1. Cálculo diferencial 1 / 57 Una función es una herramienta mediante la que expresamos la relación entre una causa (variable independiente) y un efecto (variable dependiente). Las funciones nos permiten
METODOS NUMERICOS. Curso
 Boletín 1 de prácticas. 1. Localizar las raíces de la ecuación F (x) = 0, para los siguientes casos: (a) F (x) = x + e x. (b) F (x) = 0.5 x + 0.2 sen(x). (c) F (x) = x tg(x). (d) F (x) = x 5 3. (e) F (x)
Boletín 1 de prácticas. 1. Localizar las raíces de la ecuación F (x) = 0, para los siguientes casos: (a) F (x) = x + e x. (b) F (x) = 0.5 x + 0.2 sen(x). (c) F (x) = x tg(x). (d) F (x) = x 5 3. (e) F (x)
TEMA N 2 RECTAS EN EL PLANO
 2.1 Distancia entre dos puntos1 TEMA N 2 RECTAS EN EL PLANO Sean P 1 (x 1, y 1 ) y P 2 (x 2, y 2 ) dos puntos en el plano. La distancia entre los puntos P 1 y P 2 denotada por d = esta dada por: (1) Demostración
2.1 Distancia entre dos puntos1 TEMA N 2 RECTAS EN EL PLANO Sean P 1 (x 1, y 1 ) y P 2 (x 2, y 2 ) dos puntos en el plano. La distancia entre los puntos P 1 y P 2 denotada por d = esta dada por: (1) Demostración
Complementos de Matemáticas, ITT Telemática
 Introducción Métodos de punto fijo Complementos de Matemáticas, ITT Telemática Tema 1. Solución numérica de ecuaciones no lineales Departamento de Matemáticas, Universidad de Alcalá Introducción Métodos
Introducción Métodos de punto fijo Complementos de Matemáticas, ITT Telemática Tema 1. Solución numérica de ecuaciones no lineales Departamento de Matemáticas, Universidad de Alcalá Introducción Métodos
1.1. Movimiento armónico simple
 Problemas resueltos 1.1. Movimiento armónico simple 1. Un muelle cuya constante de elasticidad es k está unido a una masa puntual de valor m. Separando la masa de la posición de equilibrio el sistema comienza
Problemas resueltos 1.1. Movimiento armónico simple 1. Un muelle cuya constante de elasticidad es k está unido a una masa puntual de valor m. Separando la masa de la posición de equilibrio el sistema comienza
Figura 3.-(a) Movimiento curvilíneo. (b) Concepto de radio de curvatura
 Movimiento curvilíneo. (b) Concepto de radio de curvatura") Componentes intrínsecas de la aceleración: Componentes tangencial y normal Alfonso Calera Departamento de Física Aplicada. ETSIA. Albacete. UCLM En muchas ocasiones el análisis del movimiento es más sencillo
Componentes intrínsecas de la aceleración: Componentes tangencial y normal Alfonso Calera Departamento de Física Aplicada. ETSIA. Albacete. UCLM En muchas ocasiones el análisis del movimiento es más sencillo
Polinomios. 1.- Funciones cuadráticas
 Polinomios 1.- Funciones cuadráticas Definición 1 (Función polinomial) Sea n un entero no negativo y sean a n, a n 1,..., a, a 1, a 0 número s reales con a n 0. La función se denomina función polinomial
Polinomios 1.- Funciones cuadráticas Definición 1 (Función polinomial) Sea n un entero no negativo y sean a n, a n 1,..., a, a 1, a 0 número s reales con a n 0. La función se denomina función polinomial
MATEMÁTICAS - 6º curso
 MATEMÁTICAS 6º curso TEMA 1. OPERACIONES CON NÚMEROS NATURALES 1. Realizar sumas y restas dadas. 2. Efectuar multiplicaciones dadas. 3. Realizar divisiones dadas. 4. Clasificar las divisiones en exactas
MATEMÁTICAS 6º curso TEMA 1. OPERACIONES CON NÚMEROS NATURALES 1. Realizar sumas y restas dadas. 2. Efectuar multiplicaciones dadas. 3. Realizar divisiones dadas. 4. Clasificar las divisiones en exactas
Contenidos mínimos 4B ESO. 1. Contenidos. Bloque I: Aritmética y álgebra.
 Contenidos mínimos 4B ESO. 1. Contenidos. Bloque I: Aritmética y álgebra. 1. Clasificar distintos tipos de números: naturales, enteros, racionales y reales. 2. Operar con números reales y aplicar las propiedades
Contenidos mínimos 4B ESO. 1. Contenidos. Bloque I: Aritmética y álgebra. 1. Clasificar distintos tipos de números: naturales, enteros, racionales y reales. 2. Operar con números reales y aplicar las propiedades
Campo Eléctrico. Fig. 1. Problema número 1.
 Campo Eléctrico 1. Cuatro cargas del mismo valor están dispuestas en los vértices de un cuadrado de lado L, tal como se indica en la figura 1. a) Hallar el módulo, dirección y sentido de la fuerza eléctrica
Campo Eléctrico 1. Cuatro cargas del mismo valor están dispuestas en los vértices de un cuadrado de lado L, tal como se indica en la figura 1. a) Hallar el módulo, dirección y sentido de la fuerza eléctrica
Unidad: Movimiento Circular
 Unidad: Movimiento Circular En esta clase estudiaremos el movimiento de un auto que se mueve con rapidez constante en línea recta y que entra a una órbita circular. El objetivo de la guía es entender de
Unidad: Movimiento Circular En esta clase estudiaremos el movimiento de un auto que se mueve con rapidez constante en línea recta y que entra a una órbita circular. El objetivo de la guía es entender de
Movimiento Circular Movimiento Armónico
 REPÚBLICA BOLIVARIANA DE VENEZUELA MINISTERIO DEL PODER POPULAR PARA LA EDUCACIÓN LICEO BRICEÑO MÉNDEZ S0120D0320 DPTO. DE CONTROL Y EVALUACIÓN PROFESOR: gxâw á atätá 4to Año GUIA # 9 /10 PARTE ( I ) Movimiento
REPÚBLICA BOLIVARIANA DE VENEZUELA MINISTERIO DEL PODER POPULAR PARA LA EDUCACIÓN LICEO BRICEÑO MÉNDEZ S0120D0320 DPTO. DE CONTROL Y EVALUACIÓN PROFESOR: gxâw á atätá 4to Año GUIA # 9 /10 PARTE ( I ) Movimiento
f (x) (1+[f (x)] 2 ) 3 2 κ(x) =
![f (x) (1+[f (x)] 2 ) 3 2 κ(x) =](/thumbs/40/20918876.jpg "f (x) (1+[f (x)] 2 ) 3 2 κ(x) =") MATEMÁTICAS II - EXAMEN PRIMER PARCIAL - 4/11/11 Grado: Ing. Electrónica Rob. y Mec. Ing. Energía Ing. Organización Ind. Nombre y Apellidos: Ejercicio 1. La curvatura de una función f en un punto x viene
MATEMÁTICAS II - EXAMEN PRIMER PARCIAL - 4/11/11 Grado: Ing. Electrónica Rob. y Mec. Ing. Energía Ing. Organización Ind. Nombre y Apellidos: Ejercicio 1. La curvatura de una función f en un punto x viene
Anexo C. Introducción a las series de potencias. Series de potencias
 Anexo C Introducción a las series de potencias Este apéndice tiene como objetivo repasar los conceptos relativos a las series de potencias y al desarrollo de una función ne serie de potencias en torno
Anexo C Introducción a las series de potencias Este apéndice tiene como objetivo repasar los conceptos relativos a las series de potencias y al desarrollo de una función ne serie de potencias en torno
TEMA II: DISTRIBUCIONES RELACIONADAS CON LA NORMAL
 ESTADÍSTICA II TEMA II: DISTRIBUCIONES RELACIONADAS CON LA NORMAL II.1.- Distribución chi-cuadrado. II.1.1.- Definición. II.1..- Función de densidad. Representación gráfica. II.1.3.- Media y varianza.
ESTADÍSTICA II TEMA II: DISTRIBUCIONES RELACIONADAS CON LA NORMAL II.1.- Distribución chi-cuadrado. II.1.1.- Definición. II.1..- Función de densidad. Representación gráfica. II.1.3.- Media y varianza.
Determinación de la constante elástica, k, de un resorte. Estudio estático y dinámico.
 Determinación de la constante elástica, k, de un resorte. Estudio estático y dinámico. Nombre: Manuel Apellidos: Fernandez Nuñez Curso: 2º A Fecha: 29/02/2008 Índice Introducción pag. 3 a 6 Objetivos.
Determinación de la constante elástica, k, de un resorte. Estudio estático y dinámico. Nombre: Manuel Apellidos: Fernandez Nuñez Curso: 2º A Fecha: 29/02/2008 Índice Introducción pag. 3 a 6 Objetivos.
4.1. Movimiento oscilatorio: el movimiento vibratorio armónico simple.
 4.1. Movimiento oscilatorio: el movimiento vibratorio armónico simple. 4.1.1. Movimiento oscilatorio características. 4.1.2. Movimiento periódico: período. 4.1.3. Movimiento armónico simple: características
4.1. Movimiento oscilatorio: el movimiento vibratorio armónico simple. 4.1.1. Movimiento oscilatorio características. 4.1.2. Movimiento periódico: período. 4.1.3. Movimiento armónico simple: características
Métodos numéricos para Ecuaciones Diferenciales Ordinarias
 Métodos numéricos para Ecuaciones Diferenciales Ordinarias Laboratori de Càlcul Numèric (LaCàN) Departament de Matemàtica Aplicada III Universitat Politècnica de Catalunya (Barcelona) http://www-lacan.upc.es
Métodos numéricos para Ecuaciones Diferenciales Ordinarias Laboratori de Càlcul Numèric (LaCàN) Departament de Matemàtica Aplicada III Universitat Politècnica de Catalunya (Barcelona) http://www-lacan.upc.es
Curvas en paramétricas y polares
 Capítulo 10 Curvas en paramétricas y polares Introducción Después del estudio detallado de funciones reales de variable real expresadas en forma explícita y con coordenadas cartesianas, que se ha hecho
Capítulo 10 Curvas en paramétricas y polares Introducción Después del estudio detallado de funciones reales de variable real expresadas en forma explícita y con coordenadas cartesianas, que se ha hecho
Tema 4 Álgebra Lineal Numérica
 Tema 4 Álgebra Lineal Numérica Departamento de Matemática Aplicada Universidad de Málaga Escuela Politécnica Superior Qué es un Sistema Lineal? Qué es un Sistema Lineal? Conocimientos previos Definiciones.
Tema 4 Álgebra Lineal Numérica Departamento de Matemática Aplicada Universidad de Málaga Escuela Politécnica Superior Qué es un Sistema Lineal? Qué es un Sistema Lineal? Conocimientos previos Definiciones.
Solución de ecuaciones algebraicas y trascendentes: Método de Newton Raphson
 Solución de ecuaciones algebraicas y trascendentes: Método de Newton Raphson Ing. Jesús Javier Cortés Rosas M. en A. Miguel Eduardo González Cárdenas M. en A. Víctor D. Pinilla Morán Facultad de Ingeniería,
Solución de ecuaciones algebraicas y trascendentes: Método de Newton Raphson Ing. Jesús Javier Cortés Rosas M. en A. Miguel Eduardo González Cárdenas M. en A. Víctor D. Pinilla Morán Facultad de Ingeniería,
Laboratori de Càlcul Numèric (LaCàN) Departament de Matemàtica Aplicada III Universitat Politècnica de Catalunya (Barcelona) http://www-lacan.upc.
 Departament de Matemàtica Aplicada III Universitat Politècnica de Catalunya (Barcelona) http://www-lacan.upc.") Integración numérica Laboratori de Càlcul Numèric (LaCàN) Departament de Matemàtica Aplicada III Universitat Politècnica de Catalunya (Barcelona) http://www-lacan.upc.es Índice Motivación y objetivos Cuadratura
Integración numérica Laboratori de Càlcul Numèric (LaCàN) Departament de Matemàtica Aplicada III Universitat Politècnica de Catalunya (Barcelona) http://www-lacan.upc.es Índice Motivación y objetivos Cuadratura
Ecuaciones diferenciales lineales con coeficientes constantes
 Tema 4 Ecuaciones diferenciales lineales con coeficientes constantes Una ecuación diferencial lineal de orden n tiene la forma a 0 (x)y (n) + a 1 (x)y (n 1) + + a n 1 (x)y + a n (x)y = b(x) (41) Vamos
Tema 4 Ecuaciones diferenciales lineales con coeficientes constantes Una ecuación diferencial lineal de orden n tiene la forma a 0 (x)y (n) + a 1 (x)y (n 1) + + a n 1 (x)y + a n (x)y = b(x) (41) Vamos
Métodos Numéricos I - C.S.I. - Curso 2003/04. TEMA 2: Interpolación polinómica de funciones
 Ejercicios. Hoja 2.1 1. Usar la fórmula de Lagrange para obtener un polinomio cúbico que interpola los valores de la tabla siguiente. Evaluarlo luego para x = 2, 3, 5. x k 0 1 4 6 y k 1-1 1-1 [Sol.: P
Ejercicios. Hoja 2.1 1. Usar la fórmula de Lagrange para obtener un polinomio cúbico que interpola los valores de la tabla siguiente. Evaluarlo luego para x = 2, 3, 5. x k 0 1 4 6 y k 1-1 1-1 [Sol.: P
Cálculo diferencial DERIVACIÓN
 DERIVACIÓN Definición de límite Entorno Definición. Se le llama entorno o vecindad de un punto a en R, al intervalo abierto (a - δ, a + δ ) = {a a - δ < x < a + δ }, en donde δ es semiamplitud a radio
DERIVACIÓN Definición de límite Entorno Definición. Se le llama entorno o vecindad de un punto a en R, al intervalo abierto (a - δ, a + δ ) = {a a - δ < x < a + δ }, en donde δ es semiamplitud a radio
Ecuaciones Diferenciales, Fracciones Parciales y Fórmulas de Heaviside
 Ecuaciones Diferenciales, Fracciones Parciales y Fórmulas de Heaviside Dr. Julián Gpe. Tapia Aguilar E S F M Instituto Politécnico Nacional julianpe@yahoo.com.mx Agosto de 2008 Índice 1. Introducción 1
Ecuaciones Diferenciales, Fracciones Parciales y Fórmulas de Heaviside Dr. Julián Gpe. Tapia Aguilar E S F M Instituto Politécnico Nacional julianpe@yahoo.com.mx Agosto de 2008 Índice 1. Introducción 1
INSTRUCCIONES GENERALES Y VALORACIÓN
 UNIVERSIDADES P ÚBLICAS DE LA COMUNIDAD DE MADRID PRUEBA DE ACCESO A LAS ENSEÑANZAS UNIVERSITARIAS OFICIALES DE GRADO 215-216 MATERIA: MATEMÁTICAS II MODELO INSTRUCCIONES GENERALES Y VALORACIÓN Después
UNIVERSIDADES P ÚBLICAS DE LA COMUNIDAD DE MADRID PRUEBA DE ACCESO A LAS ENSEÑANZAS UNIVERSITARIAS OFICIALES DE GRADO 215-216 MATERIA: MATEMÁTICAS II MODELO INSTRUCCIONES GENERALES Y VALORACIÓN Después
IES Fco Ayala de Granada Septiembre de 2013 (Modelo 3 Especifico) Solucíon Germán-Jesús Rubio Luna. Opción A
 Solucíon Germán-Jesús Rubio Luna. Opción A") Opción A Ejercicio opción A, modelo 3 Septiembre 03 específico x Sea f la función definida por f(x) = para x > 0, x (donde ln denota el logaritmo neperiano) ln(x) [ 5 puntos] Estudia y determina las asíntotas
Opción A Ejercicio opción A, modelo 3 Septiembre 03 específico x Sea f la función definida por f(x) = para x > 0, x (donde ln denota el logaritmo neperiano) ln(x) [ 5 puntos] Estudia y determina las asíntotas
Sistemas de Ecuaciones Lineales
 Sistemas de Ecuaciones Lineales 1 Sistemas de ecuaciones y matrices Definición 1 Una ecuación lineal en las variables x 1, x 2,..., x n es una ecuación de la forma con a 1, a 2... y b números reales. a
Sistemas de Ecuaciones Lineales 1 Sistemas de ecuaciones y matrices Definición 1 Una ecuación lineal en las variables x 1, x 2,..., x n es una ecuación de la forma con a 1, a 2... y b números reales. a
MÉTODOS NUMÉRICOS - ALGUNAS INSTRUCCIONES EN DERIVE
 MÉTODOS NUMÉRICOS - ALGUNAS INSTRUCCIONES EN DERIVE Las siguientes instrucciones corresponden, en su mayoría, a funciones definidas por el profesor Julio C. Morales, como complemento a las utilidades del
MÉTODOS NUMÉRICOS - ALGUNAS INSTRUCCIONES EN DERIVE Las siguientes instrucciones corresponden, en su mayoría, a funciones definidas por el profesor Julio C. Morales, como complemento a las utilidades del
1. Aplique el método de inducción matemática para probar las siguientes proposiciones. e) f) es divisible por 6. a) b) c) d) e) f)
 f) es divisible por 6. a) b) c) d) e) f)") 1. Aplique el método de inducción matemática para probar las siguientes proposiciones. a) b) c) d) e) f) es divisible por 6. g) 2. Halle la solución de las siguientes desigualdades de primer orden. g)
1. Aplique el método de inducción matemática para probar las siguientes proposiciones. a) b) c) d) e) f) es divisible por 6. g) 2. Halle la solución de las siguientes desigualdades de primer orden. g)
5. Al simplificar. expresión se obtiene:
 ARITMÉTICA. [ ( 7 ) 9 ( 7 )] es igual a : 5. El resultado de simplificar la expresión. 5 5 5 7 7, 6 + es igual a: 5 9 7 6 5 5. El valor de 75 6 5 5 ( 5 )( 65 ) log es igual a: 5 5 5. Al simplificar Mayo
ARITMÉTICA. [ ( 7 ) 9 ( 7 )] es igual a : 5. El resultado de simplificar la expresión. 5 5 5 7 7, 6 + es igual a: 5 9 7 6 5 5. El valor de 75 6 5 5 ( 5 )( 65 ) log es igual a: 5 5 5. Al simplificar Mayo
Matemáticas 4 Enero 2016
 Laboratorio #1 Vectores I.- Calcule el producto escalar de los dos vectores y el coseno del ángulo entre ellos. 1) u = 3i + 2j 4k; v = i + 5j 3k 2) u = i + 2j 3k; v = 1i 2j + 3k 3) u = 1 2 i + 1 3 j +
Laboratorio #1 Vectores I.- Calcule el producto escalar de los dos vectores y el coseno del ángulo entre ellos. 1) u = 3i + 2j 4k; v = i + 5j 3k 2) u = i + 2j 3k; v = 1i 2j + 3k 3) u = 1 2 i + 1 3 j +
ESCUELA TÉCNICA SUPERIOR DE INGENIEROS AERONÁUTICOS. Examen: Mecánica I (Probl. de Cinemática) Curso: 08/09 Fecha: 14.11.2008
 Curso: 08/09 Fecha: 14.11.2008") ESCUELA TÉCNICA SUPERIOR DE INGENIEROS AERONÁUTICOS APELLIDOS, NOMBRE: n o Examen: Mecánica I (Probl. de Cinemática) Curso: 08/09 Fecha: 14.11.008 Sea Oxyz un sistema de referencia ligado a un sólido S
ESCUELA TÉCNICA SUPERIOR DE INGENIEROS AERONÁUTICOS APELLIDOS, NOMBRE: n o Examen: Mecánica I (Probl. de Cinemática) Curso: 08/09 Fecha: 14.11.008 Sea Oxyz un sistema de referencia ligado a un sólido S
Formulas de Newton-Cotes
 Formulas de Newton-Cotes. Usando las reglas del Trapecio, Punto Medio, Simpson y las formulas de Newton-Cotes abiertas con n =,, aproxime el valor de las siguientes Integrales. Construya una tabla para
Formulas de Newton-Cotes. Usando las reglas del Trapecio, Punto Medio, Simpson y las formulas de Newton-Cotes abiertas con n =,, aproxime el valor de las siguientes Integrales. Construya una tabla para
Cálculo científico y técnico con HP49g/49g+/48gII/50g Módulo 3: Aplicaciones Tema 3.2 Determinación aproximada de extremos: Método de Newton-Raphson
 Cálculo científico y técnico con HP49g/49g+/48gII/50g Módulo 3: Aplicaciones Tema 3.2 Determinación aproximada de extremos: Método de Newton-Raphson Francisco Palacios Escuela Politécnica Superior de Ingeniería
Cálculo científico y técnico con HP49g/49g+/48gII/50g Módulo 3: Aplicaciones Tema 3.2 Determinación aproximada de extremos: Método de Newton-Raphson Francisco Palacios Escuela Politécnica Superior de Ingeniería
Ecuaciones. 3º de ESO
 Ecuaciones 3º de ESO El signo igual El signo igual se utiliza en: Igualdades numéricas: 2 + 3 = 5 Identidades algebraicas: (x + 4) x = x 2 + 4 4x Fórmulas: El área, A,, de un círculo de radio r es: A =
Ecuaciones 3º de ESO El signo igual El signo igual se utiliza en: Igualdades numéricas: 2 + 3 = 5 Identidades algebraicas: (x + 4) x = x 2 + 4 4x Fórmulas: El área, A,, de un círculo de radio r es: A =
PRÁCTICA REMOTA PÉNDULO FÍSICO AMORTIGUADO
 PRÁCTICA REMTA PÉNDUL FÍSIC AMRTIGUAD 1. BJETIV Estudio del comportamiento de un péndulo físico débilmente amortiguado. Determinación de la constante de amortiguamiento, γ, del periodo, T, de la frecuencia
PRÁCTICA REMTA PÉNDUL FÍSIC AMRTIGUAD 1. BJETIV Estudio del comportamiento de un péndulo físico débilmente amortiguado. Determinación de la constante de amortiguamiento, γ, del periodo, T, de la frecuencia
Matrices, determinantes, sistemas de ecuaciones lineales.
 UNIVERSIDAD DE MURCIA Departamento de Matemáticas Óptica y Optometría Resúmenes Curso 2007-2008 Matrices, determinantes, sistemas de ecuaciones lineales. Una matriz A de orden m n es una colección de m
UNIVERSIDAD DE MURCIA Departamento de Matemáticas Óptica y Optometría Resúmenes Curso 2007-2008 Matrices, determinantes, sistemas de ecuaciones lineales. Una matriz A de orden m n es una colección de m
1. Determinar las ecuaciones paramétricas y la ecuación continua de las rectas que pasan por el punto A y con el vector de dirección dado:
 CAPÍTULO. GEOMETRÍA AFÍN.. Problemas. Determinar las ecuaciones paramétricas y la ecuación continua de las rectas que pasan por el punto A y con el vector de dirección dado: a) A(,, ), v = (,, ) ; b) A(0,
CAPÍTULO. GEOMETRÍA AFÍN.. Problemas. Determinar las ecuaciones paramétricas y la ecuación continua de las rectas que pasan por el punto A y con el vector de dirección dado: a) A(,, ), v = (,, ) ; b) A(0,
x = 0, la recta tangente a la gráfica de f (x)
") CÁLCULO DIFERENCIAL JUNIO 004 1. Sea la función e y = estúdiese su monotonía, etremos relativos y asíntotas. (Solución: Es derivable en todos los puntos ecepto en =0. Creciente si < 0. No tiene asíntotas
CÁLCULO DIFERENCIAL JUNIO 004 1. Sea la función e y = estúdiese su monotonía, etremos relativos y asíntotas. (Solución: Es derivable en todos los puntos ecepto en =0. Creciente si < 0. No tiene asíntotas
CURSO BÁSICO DE MATEMÁTICAS PARA ESTUDIANTES DE ECONÓMICAS Y EMPRESARIALES
 Unidad didáctica. Ecuaciones, inecuaciones y sistemas de ecuaciones e inecuaciones CONCEPTOS ECUACIONES Una ecuación es una igualdad entre dos epresiones en las que aparece una o varias incógnitas. En
Unidad didáctica. Ecuaciones, inecuaciones y sistemas de ecuaciones e inecuaciones CONCEPTOS ECUACIONES Una ecuación es una igualdad entre dos epresiones en las que aparece una o varias incógnitas. En
www.matesxronda.net José A. Jiménez Nieto
 NÚMEROS REALES 1. NÚMEROS IRRACIONALES: CARACTERIZACIÓN. En el tema correspondiente a números racionales hemos visto que estos números tienen una característica esencial: su expresión decimal es exacta
NÚMEROS REALES 1. NÚMEROS IRRACIONALES: CARACTERIZACIÓN. En el tema correspondiente a números racionales hemos visto que estos números tienen una característica esencial: su expresión decimal es exacta
Estudio Experimental de la Segunda Ley de Newton
 Estudio Experimental de la Segunda Ley de Newton Lilian E. Mariani Universidad Favaloro Mariela Azul González Ciudad de Bs. As. 11 de mayo de 000 Diego Saurina ( die.go@usa.net) M. Jimena Antonelli Hernán
Estudio Experimental de la Segunda Ley de Newton Lilian E. Mariani Universidad Favaloro Mariela Azul González Ciudad de Bs. As. 11 de mayo de 000 Diego Saurina ( die.go@usa.net) M. Jimena Antonelli Hernán
TEMA 1: NÚMEROS REALES
 TEMA 1: NÚMEROS REALES 3º ESO Matemáticas Apuntes para trabajo del alumnos en el aula. 1. Fracciones. Números racionales Si se multiplican o dividen el numerador y el denominador de una fracción por un
TEMA 1: NÚMEROS REALES 3º ESO Matemáticas Apuntes para trabajo del alumnos en el aula. 1. Fracciones. Números racionales Si se multiplican o dividen el numerador y el denominador de una fracción por un
Tema Contenido Contenidos Mínimos
 1 Números racionales - Fracciones equivalentes. - Simplificación de fracciones. - Representación y comparación de los números fraccionarios. - Operaciones con números fraccionarios. - Ordenación de los
1 Números racionales - Fracciones equivalentes. - Simplificación de fracciones. - Representación y comparación de los números fraccionarios. - Operaciones con números fraccionarios. - Ordenación de los
OPCIÓN A. x y 2 0 X = 1 4. x 3 1 x 2. f (x) =
 =") UNIVERSIDADES PÚBLICAS DE LA COMUNIDAD DE MADRID PRUEBA DE ACCESO A LAS ENSEÑANZAS UNIVERSITARIAS OFICIALES DE GRADO Curso 2015-2016 MATERIA: MATEMÁTICAS APLICADAS A LAS CIENCIAS SOCIALES II Modelo INSTRUCCIONES
UNIVERSIDADES PÚBLICAS DE LA COMUNIDAD DE MADRID PRUEBA DE ACCESO A LAS ENSEÑANZAS UNIVERSITARIAS OFICIALES DE GRADO Curso 2015-2016 MATERIA: MATEMÁTICAS APLICADAS A LAS CIENCIAS SOCIALES II Modelo INSTRUCCIONES
5. INTEGRALES MULTIPLES
 5. INTEGRALES MULTIPLES INDICE 5 5.. Integrales iteradas. 5.. Definición de integral doble: áreas y volúmenes..3 5.3. Integral doble en coordenadas polares 5 5.4. Aplicaciones de la integral doble (geométricas
5. INTEGRALES MULTIPLES INDICE 5 5.. Integrales iteradas. 5.. Definición de integral doble: áreas y volúmenes..3 5.3. Integral doble en coordenadas polares 5 5.4. Aplicaciones de la integral doble (geométricas
FÍSICA GENERAL. MC Beatriz Gpe. Zaragoza Palacios 2015 Departamento de Física Universidad de Sonora
 FÍSICA GENERAL MC Beatriz Gpe. Zaragoza Palacios 015 Departamento de Física Universidad de Sonora TEMARIO 0. Presentación 1. Mediciones y vectores. Equilibrio traslacional 3. Movimiento uniformemente acelerado
FÍSICA GENERAL MC Beatriz Gpe. Zaragoza Palacios 015 Departamento de Física Universidad de Sonora TEMARIO 0. Presentación 1. Mediciones y vectores. Equilibrio traslacional 3. Movimiento uniformemente acelerado
(a) [0,7 puntos] Encuentre los valores de las constantes A y B, y del punto x 2 (0, 1) de modo que la fórmula de cuadratura:
![(a) [0,7 puntos] Encuentre los valores de las constantes A y B, y del punto x 2 (0, 1) de modo que la fórmula de cuadratura:](/thumbs/87/96403039.jpg "(a) [0,7 puntos] Encuentre los valores de las constantes A y B, y del punto x 2 (0, 1) de modo que la fórmula de cuadratura:") UNIVERSIDAD DIEGO PORTALES. FACULTAD DE INGENIERÍA. INSTITUTO DE CIENCIAS BÁSICAS. Cálculo Numérico, Control 3. Semestre Otoño 7 Problema ( puntos) (a) [,7 puntos] Encuentre los valores de las constantes
UNIVERSIDAD DIEGO PORTALES. FACULTAD DE INGENIERÍA. INSTITUTO DE CIENCIAS BÁSICAS. Cálculo Numérico, Control 3. Semestre Otoño 7 Problema ( puntos) (a) [,7 puntos] Encuentre los valores de las constantes
4. Mecánica Rotacional
 4. Mecánica Rotacional Cinemática Rotacional: (Conceptos básicos) Radián Velocidad angular Aceleración angular Frecuencia y período Velocidad tangencial Aceleración tangencial Aceleración centrípeta Torca
4. Mecánica Rotacional Cinemática Rotacional: (Conceptos básicos) Radián Velocidad angular Aceleración angular Frecuencia y período Velocidad tangencial Aceleración tangencial Aceleración centrípeta Torca
Examen de Junio de 2011 (Común) con soluciones (Modelo )
 con soluciones (Modelo )") Opción A Junio 011 común ejercicio 1 opción A ['5 puntos] Se desea construir un depósito cilíndrico cerrado de área total igual a 54 m. Determina el radio de la base y la altura del cilindro para que éste
Opción A Junio 011 común ejercicio 1 opción A ['5 puntos] Se desea construir un depósito cilíndrico cerrado de área total igual a 54 m. Determina el radio de la base y la altura del cilindro para que éste
Cinemática en 2D: Movimiento Circular.
 Cinemática en 2D: Movimiento Circular. Movimiento circular uniforme Otro caso particular de movimiento en dos dimensiones es el de una partícula que se mueve describiendo una trayectoria circular, con
Cinemática en 2D: Movimiento Circular. Movimiento circular uniforme Otro caso particular de movimiento en dos dimensiones es el de una partícula que se mueve describiendo una trayectoria circular, con
Sistemas de ecuaciones lineales
 Sistemas de ecuaciones lineales Escuela de Ingeniería Informática de Oviedo (Dpto. de Matemáticas-UniOvi) Computación Numérica Sistemas Lineales / 8 Contenidos Introducción Métodos directos Gauss Gauss
Sistemas de ecuaciones lineales Escuela de Ingeniería Informática de Oviedo (Dpto. de Matemáticas-UniOvi) Computación Numérica Sistemas Lineales / 8 Contenidos Introducción Métodos directos Gauss Gauss
UNIVERSIDAD COMPLUTENSE DE MADRID
 INSTRUCCIONES GENERALES Y VALORACIÓN TIEMPO: Una hora y treinta minutos. INSTRUCCIONES: El examen presenta dos opciones A y B; el alumno deberá elegir una de ellas y contestar razonadamente a los cuatro
INSTRUCCIONES GENERALES Y VALORACIÓN TIEMPO: Una hora y treinta minutos. INSTRUCCIONES: El examen presenta dos opciones A y B; el alumno deberá elegir una de ellas y contestar razonadamente a los cuatro
PRÁCTICA: MOMENTOS DE INERCIA Y PÉNDULO FÍSICO
 PRÁCTICA: MOMENTOS DE INERCIA Y PÉNDULO FÍSICO Parte I: MOMENTOS DE INERCIA Objetivo: Determinar experimentalmente el momento de inercia de un disco respecto a su centro de gravedad y respecto a distintos
PRÁCTICA: MOMENTOS DE INERCIA Y PÉNDULO FÍSICO Parte I: MOMENTOS DE INERCIA Objetivo: Determinar experimentalmente el momento de inercia de un disco respecto a su centro de gravedad y respecto a distintos
3. Resolver triángulos rectángulos utilizando las definiciones de las razones trigonométricas.
 Contenidos mínimos MI. 1. Contenidos. Bloque I: Aritmética y Álgebra. 1. Conocer las clases de números, los conjuntos numéricos: naturales, enteros, racionales, reales y complejos y las propiedades que
Contenidos mínimos MI. 1. Contenidos. Bloque I: Aritmética y Álgebra. 1. Conocer las clases de números, los conjuntos numéricos: naturales, enteros, racionales, reales y complejos y las propiedades que
JUNIO 2010. Opción A. 1 1.- Dada la parábola y = 3 área máxima que tiene un lado en la recta y los otros dos vértices en la gráfica de la parábola.
 Junio 00 (Prueba Específica) JUNIO 00 Opción A.- Dada la parábola y 3 área máima que tiene un lado en la recta y los otros dos vértices en la gráfica de la parábola., y la recta y 9, hallar las dimensiones
Junio 00 (Prueba Específica) JUNIO 00 Opción A.- Dada la parábola y 3 área máima que tiene un lado en la recta y los otros dos vértices en la gráfica de la parábola., y la recta y 9, hallar las dimensiones
Vectores y Matrices. Tema 3: Repaso de Álgebra Lineal Parte I. Contenidos
 Tema 3: Repaso de Álgebra Lineal Parte I Virginia Mazzone Contenidos Vectores y Matrices Bases y Ortonormailizaciòn Norma de Vectores Ecuaciones Lineales Algenraicas Ejercicios Vectores y Matrices Los
Tema 3: Repaso de Álgebra Lineal Parte I Virginia Mazzone Contenidos Vectores y Matrices Bases y Ortonormailizaciòn Norma de Vectores Ecuaciones Lineales Algenraicas Ejercicios Vectores y Matrices Los
Ejercicios de M.A.S y Movimiento Ondulatorio de PAU
 1. En el laboratorio del instituto medimos cinco veces el tiempo que un péndulo simple de 1m de longitud tarda en describir 45 oscilaciones de pequeña amplitud. Los resultados de la medición se muestran
1. En el laboratorio del instituto medimos cinco veces el tiempo que un péndulo simple de 1m de longitud tarda en describir 45 oscilaciones de pequeña amplitud. Los resultados de la medición se muestran
www.academiacae.com!!info@academiacae.com!!91.501.36.88!!28007!madrid!
 CONTINUIDAD Y DERIVABILIDAD. TEOREMAS Y APLICACIONES DE LAS DERIVADAS 1.- junio 1994 Se sabe que y = f (x) e y = g (x) son dos curvas crecientes en x = a. Analícese si la curva y = f(x) g(x) ha de ser,
CONTINUIDAD Y DERIVABILIDAD. TEOREMAS Y APLICACIONES DE LAS DERIVADAS 1.- junio 1994 Se sabe que y = f (x) e y = g (x) son dos curvas crecientes en x = a. Analícese si la curva y = f(x) g(x) ha de ser,
TEMA 1 CINEMATICA MOVIMIENTOS EN DOS DIMENSIONES MOVIMIENTO CIRCULAR
 TEMA 1 CINEMATICA MOVIMIENTOS EN DOS DIMENSIONES MOVIMIENTO CIRCULAR CONTENIDOS REPASO DEL ÁLGEBRA VECTORIAL Proyección, componentes y módulo de un vector Operaciones: suma, resta, producto escalar y producto
TEMA 1 CINEMATICA MOVIMIENTOS EN DOS DIMENSIONES MOVIMIENTO CIRCULAR CONTENIDOS REPASO DEL ÁLGEBRA VECTORIAL Proyección, componentes y módulo de un vector Operaciones: suma, resta, producto escalar y producto
Boletín I. Cálculo diferencial de funciones de una variable
 CÁLCULO Boletín I. Cálculo diferencial de funciones de una variable 1. Demuestra que la ecuación x + sin x = Ejercicios básicos 1 x + 3 tiene al menos una raíz en [0, π]. 2. Justifica la existencia de
CÁLCULO Boletín I. Cálculo diferencial de funciones de una variable 1. Demuestra que la ecuación x + sin x = Ejercicios básicos 1 x + 3 tiene al menos una raíz en [0, π]. 2. Justifica la existencia de
Matemáticas 2º BACHILLERATO Ciencias y Tecnología CONVOCATORIA EXTRAORDINARIA DE JUNIO 2014
 Matemáticas 2º BACHILLERATO Ciencias y Tecnología CONVOCATORIA EXTRAORDINARIA DE JUNIO 2014 PRUEBA EXTAORDINAORIA: La Prueba de junio será únicamente de contenidos mínimos y estará compuesta de: Un 50%
Matemáticas 2º BACHILLERATO Ciencias y Tecnología CONVOCATORIA EXTRAORDINARIA DE JUNIO 2014 PRUEBA EXTAORDINAORIA: La Prueba de junio será únicamente de contenidos mínimos y estará compuesta de: Un 50%
TEMA 11. Autovalores y autovectores. Diagonalización y formas canónicas.
 TEMA 11 F MATEMÁTICOS TEMA 11 Autovalores y autovectores Diagonalización y formas canónicas 1 Introducción Definición 1 (Matrices semejantes) Sean A y B dos matrices cuadradas de orden n Decimos que A
TEMA 11 F MATEMÁTICOS TEMA 11 Autovalores y autovectores Diagonalización y formas canónicas 1 Introducción Definición 1 (Matrices semejantes) Sean A y B dos matrices cuadradas de orden n Decimos que A
PROBABILIDAD Y ESTADÍSTICA. Sesión 5 (En esta sesión abracamos hasta tema 5.8)
") PROBABILIDAD Y ESTADÍSTICA Sesión 5 (En esta sesión abracamos hasta tema 5.8) 5 DISTRIBUCIONES DE PROBABILIDAD CONTINUAS Y MUESTRALES 5.1 Distribución de probabilidades de una variable aleatoria continua
PROBABILIDAD Y ESTADÍSTICA Sesión 5 (En esta sesión abracamos hasta tema 5.8) 5 DISTRIBUCIONES DE PROBABILIDAD CONTINUAS Y MUESTRALES 5.1 Distribución de probabilidades de una variable aleatoria continua
cuadrada de 3 filas y tres columnas cuyo determinante vale 2.
 PROBLEMAS DE SELECTIVIDAD. BLOQUE ÁLGEBRA MATEMÁTICAS II 0 2 0. Se dan las matrices A, I y M, donde M es una matriz de dos 3 0 filas y dos columnas que verifica M 2 = M. Obtener razonadamente: a) Todos
PROBLEMAS DE SELECTIVIDAD. BLOQUE ÁLGEBRA MATEMÁTICAS II 0 2 0. Se dan las matrices A, I y M, donde M es una matriz de dos 3 0 filas y dos columnas que verifica M 2 = M. Obtener razonadamente: a) Todos
CAPITULO 7.SERIES DE FOURIER. 7.1. Sistemas de funciones ortogonales
 CAPITULO 7.SERIES DE FOURIER La publicación por Fourier (1768-1830) de la " Teoría analítica del calor ", fue de una influencia decisiva en las matemáticas posteriores. Se supone en ella que cualquier
CAPITULO 7.SERIES DE FOURIER La publicación por Fourier (1768-1830) de la " Teoría analítica del calor ", fue de una influencia decisiva en las matemáticas posteriores. Se supone en ella que cualquier
3.2 DIVIDIR UN POLINOMIO POR x a. REGLA DE RUFFINI
 TEMA 3 ÁLGEBRA MATEMÁTICAS CCSSI 1º BACH 1 TEMA 3 ÁLGEBRA 3.1 DIVISIÓN DE POLINOMIOS COCIENTE DE MONOMIOS El cociente de un monomio por otro monomio de grado inferior es un nuevo monomio cuyo grado es
TEMA 3 ÁLGEBRA MATEMÁTICAS CCSSI 1º BACH 1 TEMA 3 ÁLGEBRA 3.1 DIVISIÓN DE POLINOMIOS COCIENTE DE MONOMIOS El cociente de un monomio por otro monomio de grado inferior es un nuevo monomio cuyo grado es
CÁLCULO DIFERENCIAL Muestras de examen
 CÁLCULO DIFERENCIAL Muestras de examen Febrero 2012 T1. [2] Demostrar que la imagen continua de un conjunto compacto es compacto. T2. [2.5] Definir la diferencial de una función en un punto y demostrar
CÁLCULO DIFERENCIAL Muestras de examen Febrero 2012 T1. [2] Demostrar que la imagen continua de un conjunto compacto es compacto. T2. [2.5] Definir la diferencial de una función en un punto y demostrar
TRABAJO Y ENERGIA: CURVAS DE ENERGÍA POTENCIAL:
 TRABAJO Y ENERGIA: CURVAS DE ENERGÍA POTENCIAL: Si junto con la fuerza de Van der Waals atractiva, que varía proporcionalmente a r 7, dos atómos idénticos de masa M eperimentan una fuerza repulsiva proporcional
TRABAJO Y ENERGIA: CURVAS DE ENERGÍA POTENCIAL: Si junto con la fuerza de Van der Waals atractiva, que varía proporcionalmente a r 7, dos atómos idénticos de masa M eperimentan una fuerza repulsiva proporcional
Aproximación funcional por mínimos cuadrados
 Aproximación funcional por mínimos cuadrados Laboratori de Càlcul Numèric (LaCàN) Departament de Matemàtica Aplicada III Universitat Politècnica de Catalunya (Barcelona) http://www-lacan.upc.es Introducción
Aproximación funcional por mínimos cuadrados Laboratori de Càlcul Numèric (LaCàN) Departament de Matemàtica Aplicada III Universitat Politècnica de Catalunya (Barcelona) http://www-lacan.upc.es Introducción
Coordenadas polares. Representación de puntos con coordenadas polares. Por ejemplo
 Instituto de Matemática Cálculo Integral Profesora Elisabeth Ramos Coordenadas polares El sistema de coordenadas polares es un sistema de coordenadas bidimensional en el cual cada punto o posición del
Instituto de Matemática Cálculo Integral Profesora Elisabeth Ramos Coordenadas polares El sistema de coordenadas polares es un sistema de coordenadas bidimensional en el cual cada punto o posición del
TEMA 4: DERIVADAS. En símbolos, la pendiente de la curva en P = lim Q P (pendiente de P Q).
.") TEMA 4: DERIVADAS 1. La derivada de una función. Reglas de derivación 1.1. La pendiente de una curva. La pendiente de una curva en un punto P es una medida de la inclinación de la curva en ese punto. Si
TEMA 4: DERIVADAS 1. La derivada de una función. Reglas de derivación 1.1. La pendiente de una curva. La pendiente de una curva en un punto P es una medida de la inclinación de la curva en ese punto. Si
UNIVERSIDAD NACIONAL DE VILLA MERCEDES CARRERA DE KINESIOLOGIA Y FISIATRIA TRABAJO Y ENERGIA.
 TRABAJO Y ENERGIA. El problema fundamental de la Mecánica es describir como se moverán los cuerpos si se conocen las fuerzas aplicadas sobre él. La forma de hacerlo es aplicando la segunda Ley de Newton,
TRABAJO Y ENERGIA. El problema fundamental de la Mecánica es describir como se moverán los cuerpos si se conocen las fuerzas aplicadas sobre él. La forma de hacerlo es aplicando la segunda Ley de Newton,
UNIDAD: ÁLGEBRA Y FUNCIONES ECUACIÓN DE SEGUNDO GRADO Y FUNCIÓN CUADRÁTICA
 C u r s o : Matemática Material N 6 GUÍA TEÓRICO PRÁCTICA Nº UNIDAD: ÁLGEBRA Y FUNCIONES ECUACIÓN DE SEGUNDO GRADO Y FUNCIÓN CUADRÁTICA Una ecuación de segundo grado es una ecuación de la forma, o que
C u r s o : Matemática Material N 6 GUÍA TEÓRICO PRÁCTICA Nº UNIDAD: ÁLGEBRA Y FUNCIONES ECUACIÓN DE SEGUNDO GRADO Y FUNCIÓN CUADRÁTICA Una ecuación de segundo grado es una ecuación de la forma, o que
Boletín II. Cálculo diferencial de funciones de una variable
 CÁLCULO Boletín II. Cálculo diferencial de funciones de una variable Ejercicios básicos 1. Sea f la función dada por 5x 2. a) Utiliza la definición de derivada para demostrar que f (x) = 10x. b) Calcula
CÁLCULO Boletín II. Cálculo diferencial de funciones de una variable Ejercicios básicos 1. Sea f la función dada por 5x 2. a) Utiliza la definición de derivada para demostrar que f (x) = 10x. b) Calcula
RAICES DE ECUACIONES Y SISTEMA DE ECUACIONES
 RAICES DE ECUACIONES Y SISTEMA DE ECUACIONES Justo Rojas T. Laboratorio de Simulación Computacional de Materiales Facultad de Ciencias Físicas Universidad Nacional Mayor de San Marcos Abril 24, 2012 Curso
RAICES DE ECUACIONES Y SISTEMA DE ECUACIONES Justo Rojas T. Laboratorio de Simulación Computacional de Materiales Facultad de Ciencias Físicas Universidad Nacional Mayor de San Marcos Abril 24, 2012 Curso
Funciones de varias variables: problemas propuestos
 Funciones de varias variables: problemas propuestos BENITO J. GONZÁLEZ RODRÍGUEZ (bjglez@ull.es) DOMINGO HERNÁNDEZ ABREU (dhabreu@ull.es) MATEO M. JIMÉNEZ PAIZ (mjimenez@ull.es) M. ISABEL MARRERO RODRÍGUEZ
Funciones de varias variables: problemas propuestos BENITO J. GONZÁLEZ RODRÍGUEZ (bjglez@ull.es) DOMINGO HERNÁNDEZ ABREU (dhabreu@ull.es) MATEO M. JIMÉNEZ PAIZ (mjimenez@ull.es) M. ISABEL MARRERO RODRÍGUEZ
ÁLGEBRA LINEAL Y GEOMETRÍA ANALÍTICA (0250)
") Universidad Central de Venezuela Facultad de Ingeniería Ciclo Básico Departamento de Matemática Aplicada ÁLGEBRA LINEAL Y GEOMETRÍA ANALÍTICA (0250) Semestre 1-2011 Mayo 2011 Álgebra Lineal y Geometría
Universidad Central de Venezuela Facultad de Ingeniería Ciclo Básico Departamento de Matemática Aplicada ÁLGEBRA LINEAL Y GEOMETRÍA ANALÍTICA (0250) Semestre 1-2011 Mayo 2011 Álgebra Lineal y Geometría
DERIVADAS, LÍMITES Y TEOREMAS DE DERIVABILIDAD
 DERIVADAS, LÍMITES Y TEOREMAS DE DERIVABILIDAD Aplicando el teorema de los incrementos finitos a la función f(x) = x 2 + 4x - 2 en los extremos [-1, 3] hallar x o El teorema de Lagrange dice que: f(3)
DERIVADAS, LÍMITES Y TEOREMAS DE DERIVABILIDAD Aplicando el teorema de los incrementos finitos a la función f(x) = x 2 + 4x - 2 en los extremos [-1, 3] hallar x o El teorema de Lagrange dice que: f(3)
Ejercicios de M.A.S y Movimiento Ondulatorio de PAU
 1. En el laboratorio del instituto medimos cinco veces el tiempo que un péndulo simple de 1m de longitud tarda en describir 45 oscilaciones de pequeña amplitud. Los resultados de la medición se muestran
1. En el laboratorio del instituto medimos cinco veces el tiempo que un péndulo simple de 1m de longitud tarda en describir 45 oscilaciones de pequeña amplitud. Los resultados de la medición se muestran