UNIVERSIDAD AUTÓNOMA DEL ESTADO DE HIDALGO ESCUELA SUPERIOR DE TIZAYUCA TRANSFORMADA DE LAPALACE Y Z INGENIERÍA EN TECNOLOGÍAS DE AUTOMATIZACIÓN
|
|
|
- Victoria Márquez Ortiz de Zárate
- hace 6 años
- Vistas:
Transcripción

1 UNIVERSIDAD AUTÓNOMA DEL ESTADO DE HIDALGO ESCUELA SUPERIOR DE TIZAYUCA TRANSFORMADA DE LAPALACE Y Z INGENIERÍA EN TECNOLOGÍAS DE AUTOMATIZACIÓN
2 Contenido del programa Unidad I Conocer los fundamentos de los números complejos para diseño de sistemas de control mediante ejercicios para los casos más comunes de aplicación. 1.- Números complejos 1.1. Funciones holomorfa 1.2. Series de potencias 1.3. Integración sobre caminos. El teorema de Caushy Goursat 1.4. Índice y teorema general de Caushy 1.5. Cálculo de residuos y aplicaciones
3 Contenido del programa Unidad II Utilizar el método de Laplace para el análisis de funciones en el plano complejo mediante el desarrollo de modelos aplicados a sistemas de control continuo. 2. Transformada de Laplace 2.1. Solución de ecuaciones diferenciales 2.2. Aplicaciones a la Ingeniería 2.3. Funciones de transferencia 2.4. Respuesta de frecuencia 2.5. Software para matemáticas
4 Contenido del programa Unidad III Utilizar el método de la transformada Z para el análisis y desarrollo de sistemas de control digital. 3. Transformada Z 3.1. Definición de la transformada Z unilateral 3.2. Propiedades de la causal 3.3. Relación entre la transformada Z unilateral y la transformada de Laplace 3.4. Aproximación de integrales con sumas finitas 3.5. Integrales de Riemann 3.6. Software para matemáticas

5 Valores de la UAEH CAPÍTULO II De sus principios fundamentales Artículo 5. Son normas permanentes en el quehacer de la Universidad los principios de libertad de cátedra, investigación y libre manifestación de las ideas, en un marco permanente de respeto a la pluralidad de pensamiento y a la tolerancia que deben guardarse entre sí los miembros de la comunidad universitaria, la tutela de los derechos humanos, la observancia de la equidad de género y el fomento de los valores de respeto, honestidad, transparencia, lealtad y responsabilidad, con especial atención a la prevención de adicciones y de distribución y consumo de estupefacientes.
6 Unidad I Objetivo. Conocer los fundamentos de los números complejos para diseño de sistemas de control mediante ejercicios para los casos más comunes de aplicación. Competencias: Comunicación, Formación, Pensamiento Crítico, Creatividad, Liderazgo Colaborativo, Ciudadanía, Uso de la Tecnología.
7 Cómo surgen los números complejos A finales del siglo XV El matemático Francés Nicolás Chuquet, consideró las raíces de números negativos (Tal solución es imposible) Leibniz ( ) factorizó la expresión x 4 + a 4 afirmando que los números imaginarios son una serie de seres anfibios Abraham de Moivre ( ) planteó algoritmos y procesos para calcular potencias y raíces de los números complejos.. Leonhard Euler usó el símbolo para la unidad imaginaria y estableció que i 2 = 1 El frances Jean D Alembert ( ), demostró que el conjunto de los números complejos es cerrado para las operaciones algebraicas Jean Robert Argand y Carl Friedrich Gauss consideró a los números complejos en la forma a + bi Augustin Louis Cauchy ( ) desarrollo la teoría de las funciones de variable compleja William Hamilton ( ) interpretó la acción de números complejo.


8 En que se aplican los números complejos? Los números complejos se han convertido en una ayuda para solucionar problemas de navegación, electrónica, astronomía, y en la solución de sistemas dinámicos.
9 Números complejos Conociendo a los complejos: La variable compleja es una rama central de las matemáticas teóricas y aplicadas. Es también fuente de dos ramas muy importantes en la actualidad: la geometría no euclidiana y los sistemas dinámicos Definición: El conjunto de los números complejos, denotado por C, consiste en todos los números de la forma a + ib, en donde a, b ε R. Es importante destacar que existe una correspondencia biunívoca de C con R 2 mediante la asociación x + iy (x, y)
10 Operaciones fundamentales de los complejos La suma 2 + 3i + 4 5i = i = 6 2i La diferencia 2 + 3i 4 5i = i = = 2 + 8i El producto 2 + 3i 4 5i =23+2i El cociente 2+3i 4+5i = 7+22i (4 5i) (4+5i) 41

11 Módulo y Argumento de números complejos Módulo y argumento del número complejo a +bi es de la siguiente forma: Módulo ρ = a 2 + b 2 Argumento tan ω = b a El argumento es igual a ω
12 Forma trigonométrica y exponencial de los números complejos Forma trigonométrica o factorial a + bi = ρ(cos ω + i sin ω) Forma exponencial ρ(cos ω + i sin ω) = ρe ωi

13 Me preparo

14 Me preparo
15 Me preparo
16 Investigación y Exposición El alumno investigará el TEOREMA DE MOIVRE. - El alumno investigará las Funciones elementales. - El alumno investigará como obtener las Raíces de Números Complejos Realizará una presentación en Power Point por equipos de 3 integrantes y las expondrán al grupo.
17 Teorema de Moivre Si multiplicamos n números complejos, a partir de la expresión del producto de dos números complejos obtenemos que el producto de n números complejos equivale a un complejo cuyo módulo es el producto de los n módulos y el argumento, la suma de los n argumentos. De esta forma:
18 Tomando todos los complejos iguales la expresión anterior queda como: Por otro lado, la n-ésima potencia del número complejo z también puede expresarse, lógicamente como: φ y igualando las dos últimas expresiones llegamos al Teorema de Moivre
19 Ejemplo Suponga que: z 1 = r 1 (cosθ 1 + j sin θ 1 ) y z 2 = r 2 (cosθ 2 + j sin θ 2 ). Demuestre que: a) z 1 z 2 = r 1 r 2 cos θ 1 + θ 2 + j sin θ 1 + θ 2 b) z 1 z 2 = r 1 r 2 cos θ 1 θ 2 + j sin θ 1 θ 2


20 Raíces de números complejos n r α La raíz enésima de un número complejo es otro número complejo tal que: Su módulo es la n raíz enésima del módulo: r = n r Su argumento es: α = α + 2πK n donde k= 0,1,2,. (n-1) n r α = n r α + 2πK n

21 Funciones complejas y mapeos Funciones Transformacionales Encuentre la imagen en el plano w de la recta y = 2x+4 en el plano z, z= x+jy, bajo el mapeo w=2z+6 w = u + jv = 2 x + jy + 6 u + jv = 2x j2y Separando las partes real e imaginaria u = 2x + 6 v = 2y
22 Funciones Transformacionales u = 2x + 6 v = 2y Despejando x e y de las ecuaciones se tiene: x = 1 2 u 6 y = 1 2 v Reescribiendo la imagen se tiene que: Sustituyendo las variables x e y en la imagen y = 2x v = 2 2(1 u 6 )+4 Multiplicando todo por 2 2 se tiene que v es: v = 2u 4
23 Ejercicios
24 Ejercicios
25 Función holomorfa Definiciones: f(z) es holomorfa en un conjunto abierto G si es derivable en todos los puntos de G. f(z) es holomorfa en un conjunto A si es holomorfa en un abierto G que contiene a A Una función f(z)es holomorfa en un punto z o si es derivable en todos los puntos de un entorno de z o, es decir, si existe un disco de centro z o y radio B r (z o ), r>0, tal que f(z) es derivable en todos sus puntos.
26 Ejemplo La función f z = z 2 es holomorfa en z = 1, y f z = 2 Comprobar si es holomorfa con las condiciones especificadas lim z 1 lim z 1 f z f(1) z 1 z 2 1 z 1 = lim z 1 z + 1 = 2


27 Series de potencias Convergencia de una serie de potencia




28 Investigación Valor de la investigación 20% El alumno investigará series de: Maclauri, Taylor, Laurent, Serie de Frobenius, se explicarán en el salón de clases por equipo. Ejercicios
29 Ejercicios
30 Ejercicios
31 Integración de Contornos Consideremos la integral definida z 2 න f z dz z 1 De la función f(z) de una variable compleja z, en donde z 1 y z 2 son un par de números complejos. Donde una integral de línea en el plano (x,y), de las variables reales x e y, es una integral de la forma. c [P x, y dx + Q x, y dy]
32 න c f z dz = න c u x, y + jv x, y dx + jdy න c f z dz = න[u x, y dx c Ambas integrales del lado derecho son integrales de línea reales de la forma c [P x, y dx + Q x, y dy] y por tanto, pueden ser evaluadas usando los métodos desarrollados para tales integrales
33 Evalúe la integral de contorno c z 2 dz a lo largo de la trayectoria C de -1+j a 5+3j y formada por dos segmentos de recta, el primero de -1+j a 5+j y el segundo de 5+j a 5+3j Solución z 2 = x + jy 2 = x 2 y 2 + j2xy Ejemplo
34
35

36 Investigación y exposición Valor 5% 1. Investigar el tema de Teorema de Green 2. Teorema de Cauchy para integrales de contorno cerrado

37 Ejercicios
38 Polos y Ceros de la función La singularidad de una función compleja es un punto en el plano Z donde f(z) no es analítica. Z= Z 0 Llamado polo f z = a n (z z 0 ) a n se obtienen los ceros de la función
39 Polos y Ceros de la función Ejemplo f z = z 1 (z + 2)(z 3) 2 Tiene un cero en z=1, un polo simple en z=-2 y un polo de orden dos en z=3
40 Ejercicios Encuentre las singularidades (polos) y ceros de las siguientes funciones complejas.
41 Encuentre las singularidades (polos) y ceros de las siguientes funciones complejas. Ejercicios
42 Residuos Residuo en a polo simple Z 0 = lim z z0 z z 0 f z = a 1 Ejemplo
43 Solución 2 (2) 4 5

44 Residuo en polo de orden m. 1 (m 1)! lim z z 0 d m 1 dz m 1 [ z z 0 m f z ] Ejemplo
45
46
47 Determine los residuos de las siguientes funciones racionales en cada polo en el plano finito z: Ejercicios
48 Bibliografía (números complejos) 1. Camargo L. et al. (2005). Alfa 9 con estándares. Grupo editorial Norma. 2. Klein P. (1986). Algebra. Ed. Reverte 3. Kurmyshew, E. (2003). Fundamentos de métodos matemáticos para física e ingeniería. Ed. Limusa 4. Tebar E. (2005). Problemas de Cálculo Infinitesimal. Editorial Tebar


49
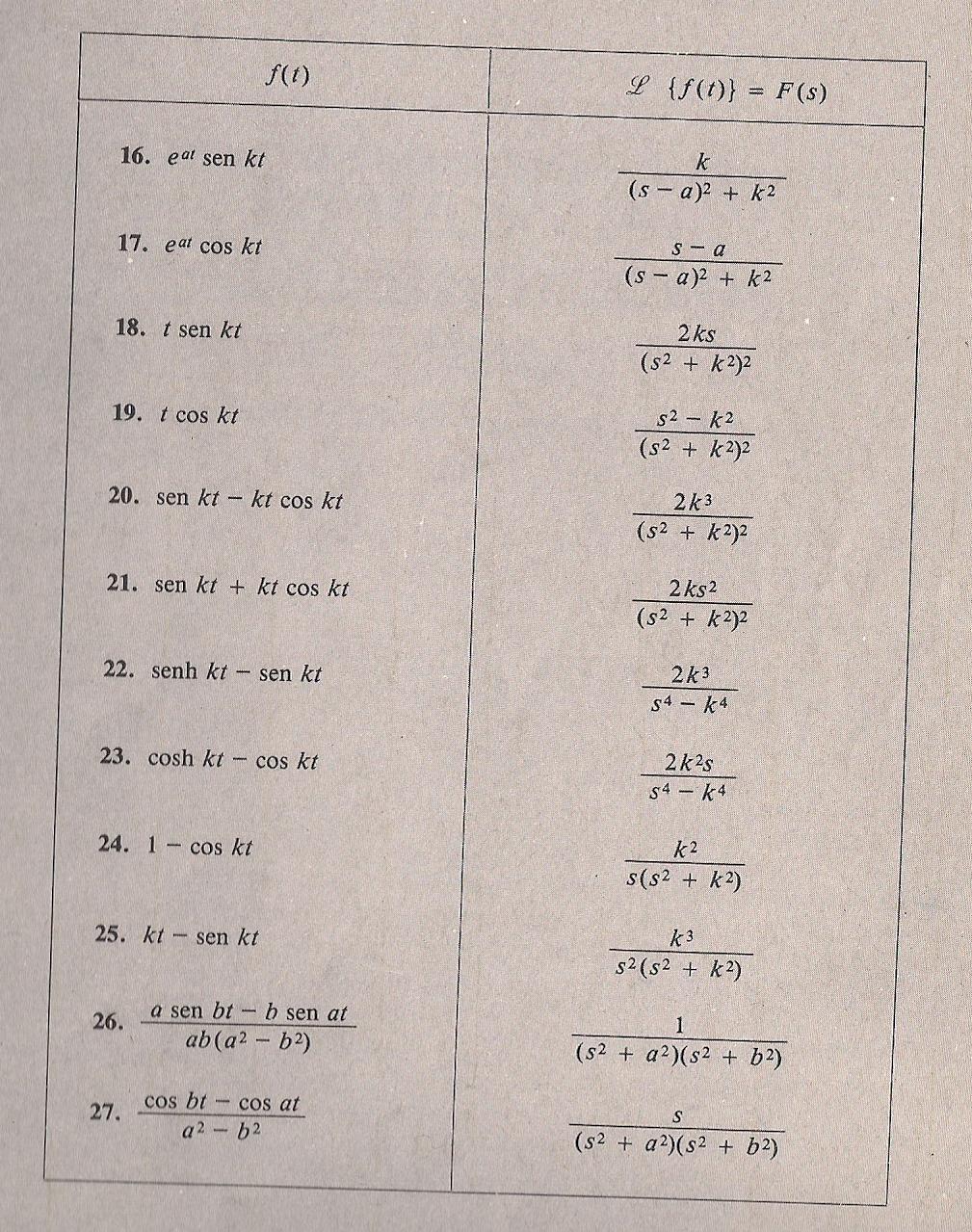
50 Fórmula L = න 0 f(t)e st dt
51 Ejemplo L e 3t L e 3t = න 0 e 3t e st dt = e s+3 t s + 3 Evaluando límites = 1 s + 3 s > 3
52 Ejercicios

53 Ejercicios
54 Transformada de Laplace Inversa
55
56
57 Ejemplo Verificar el siguiente ejercicio


58 Me preparo

59 Me preparo
60 Ecuaciones Diferenciales Aplicando Transformada de Laplace y 6y + 9y = t 2 e 3t Condiciones iniciales y 0 = 2, y 0 = 6 L y 6L y + 9L y = L t 2 e 3t Teorema
61 a n s n Y s s n 1 y 0.. y n 1 (0) + a n 1 s n 1 Y s s n 2 y 0. y n 2 (0) + + a 0 Y s = G(s) S 2 Y s sy 0 y 0 6 sy s y Y s = 2 s 3 3 Aplicando Condiciones iniciales y 0 = 2 y 0 = 6 s 2 2 6s + 9 Y s = 2s 6 + s 3 3 s Y s = 2(s 3) + s 3 3
62 Y s = 2 s s 3 5 y t = 2L 1 1 s ! L 1 4! s 3 5 Teorema de Traslación 4! s 3 5 y t = 2e 3t t4 e 3t
63 Me preparo
64 Tarea para Blackboard

65 Me preparo
66 Tarea Investigar aplicaciones a la ingeniería: circuitos eléctricos y vibraciones mecánicas
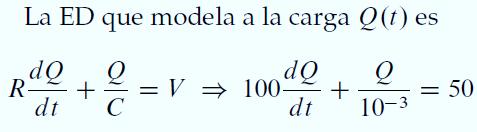
67 Circuitos eléctricos El flujo de corriente está relacionado con la carga, mediante la relación i = dq dt La caída de voltaje a través de la resistencia es igual a Ri = R dq dt La caída de voltaje a través del capacitor es igual a 1 c න idt = q c

68 Circuitos eléctricos La caída de voltaje a través de una bobina es igual a L di dt = L d2 q dt 2 Circuito RC R dq dt + 1 c Q = E

69 Circuitos eléctricos Circuito RL L d2 q dq + R dt2 dt = E Circuito RLC L d2 q dq + R dt2 dt + q c = E

70 La caída de voltaje a través de la resistencia es igual a Ri = R dq dt
71 La caída de voltaje a través del capacitor es igual a 1 c න idt = q c


72 La caída de voltaje a través de una bobina es igual a L di dt = L d2 q dt 2 Integración derivación න = 1 s d = s
73 Circuitos eléctricos
74 Dividiendo todo por 100 Resolver por factor de integración
75 Sustituyendo el valor de la constante en la primera ecuación Se tiene que: Ecuación para calcular la constante
76 Derivando la ecuación para obtener el valor de la corriente
77 Circuitos eléctricos Un circuito eléctrico consta de una resistencia en Ohms, en serie con un condensador de capacitancia en Faradios, un generador y un interruptor. Si en el tiempo t=0 se cierra el interruptor y si la carga inicial en el capacitor es cero. Determine la carga en el condensador en cualquier tiempo. Suponga que R, C y E son constantes R dq dt + 1 c Q = E
78 Circuitos RLC Circuito RLC L d2 q dq + R dt2 dt + q c = E
79 SE PUEDE RESOLVER POR ED LINEALES HOMOGÉNEAS CON COEFICIENTES CONSTANTES O VARIACIÓN DE PARÁMETROS Sustituyendo valores en la ecuación: Despejando el primer término se tiene que hay que dividir toda la ecuación entre 2
80 RESOLVIENDO LA ECUACIÓN DIFERENCIAL POR EL MÉTODO DE LAPLACE, SE TIENE QUE: L q + 6L q + 5L q = 10 CONDICIONES INICIALES DEACUERO AL PROBLEMA PLANTEADO EN CADA CASO.
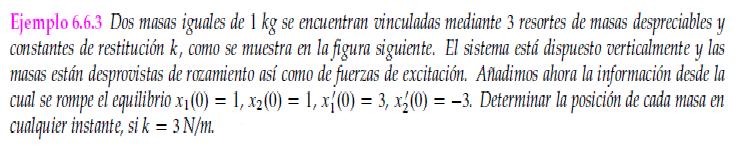
81 VIBRACIONES MECÁNICAS F = M d2 x dt 2 Ley de Newton F = K x 2 x 1 Ley de Hooke Donde K es la rigidez del resorte F = B dx 2 dt dx 1 dt Donde: B es el coeficiente de amortiguamiento
82 Ejemplo La masa del sistema masa-resorte-amortiguador está sometida a una fuerza periódica externa f t = 4 senωt aplicada en el tiempo t=0. Determine el desplazamiento resultante x(t) de la masa en el tiempo t suponiendo que x(0)= x (0)=0 a) cuando ω=2. y b) ω=5
83 M d2 x dt 2 = F t F 1 t F 2 (t) F t = M d2 x dx + B dt2 dt + kx(t) Sustituyendo valores se tiene que: d 2 x dt dx dt + 25x t = 4 sen ωt Resolviendo por Laplace X s = 4ω (s 2 + ω 2 )(s 2 + 6s + 25)
84 X s = 4ω (s 2 + ω 2 )(s 2 + 6s + 25) X s = 4(2) (s )(s 2 + 6s + 25) Resolviendo por fracciones parciales x t = sen 2t 4 cos 2t e 3t (8 cos 4t sen4t) El alumno resolverá el inciso (b) cuando ω=5
 está sujeto al extremo de un resorte flexible suspendido de un soporte rígido, el resorte ejerce una fuerza de restitución F opuesta")
85 Ejercicios de Aplicación Movimiento armónico simple Ley de Hooke. Supongamos que un cuerpo de masa (m) está sujeto al extremo de un resorte flexible suspendido de un soporte rígido, el resorte ejerce una fuerza de restitución F opuesta a la dirección del alargamiento y proporcional a su magnitud F=ks 30/03/2017 Ecuaciones Diferenciales 85
86 2ª Ley de Newton Después que una masa m se sujeta a un resorte, aquélla lo alargará en una magnitud s y alcanzará la posición de equilibrio en la cual su peso W es equilibrado por la fuerza de restitución ks W= mg Por lo que se tiene igualando la ley de Hook y la 2ª Ley de Newton Mg=ks 30/03/2017 Ecuaciones Diferenciales 86

87 Ejemplo Convertir plg. a pies 6 plg = 0.5 ft 8 plg = 2/3 ft Un cuerpo que pesa 2lb estira un resorte 6 plg. Dicho cuerpo se suelta en t=0 desde un punto que está 8 plg bajo la posición de equilibrio, con una velocidad dirigida hacia arriba de 4/3 pies/s. determine la función x(t) que describe el movimiento libre resultante. Ley de Hooke F=ks 2lb=k(0.5ft) K= 4lb/ft Convertir peso a masa m= W/g 2lb m = 32.2 ft/seg 2 = 1 16 slug 30/03/2017 Ecuaciones Diferenciales 87
88 Aplicando condiciones iniciales 1 d 2 x 16 dt 2 + 4x = 0 d 2 x dt x = 0 x 0 = 2 3 ; dx dt 0 = 4 3 x t = c 1 cos8t + c 2 sen 8t 1 x 2 = c 3 1cos8(0) + c 2 sen 8(0) 0 Resolver la ED por el método de Coeficientes Constantes c 1 = 2 3 x t = 2 3 cos8t + c 2sen 8t Derivando la ecuación 30/03/2017 Ecuaciones Diferenciales 88
 0 + 8c 1 3 3 2cos 8(0) 4 3 = 8c 2 c 2 = 1 6 30/03/2017 Ecuaciones Diferenciales")
89 x t = 2 3 cos8t + c 2sen 8t x (t) = 16 3 sen8t + 8c 2cos 8t dx dt 0 = 4 3 x (0) = 16 3 sen8t + 8c 2cos 8t x t = 2 3 cos8t 1 sen 8t 6 4 = 16 sen8(0) 0 + 8c cos 8(0) 4 3 = 8c 2 c 2 = /03/2017 Ecuaciones Diferenciales 89
90

91
92

93 Me preparo
94 Funciones de Transferencia ACTIVIDAD A DESARROLLAR POR EL ALUMNO: EL ALUMNO INVESTIGARÁ LOS TEMAS DE FUNCIÓN DE TRANSFERENCIA. EXPLICAR POR EQUIPO EN EL SALÓN DE CLASES EL TEMA DE FUNCIÓN DE TRANSFERENCIA. REALIZAR UN EJEMPLO PRÁCTICO PARA EXPLICAR EL TEMA DE FUNCIÓN DE TRANSFERENCIA. INVESTIGAR EL TEMA DE ALGEBRA CON DIAGRAMAS DE BLOQUES

95
96 Transformada Z La Transformada Z de una sucesión: x k = X z = σ k= X k Z k Siempre que exista la sumatoria y donde z es una variable compleja todavía indefinida
97 Transformada Z Para sucesiones que son Causales X k = 0 k < 0 La transformada Z dada se reduce a: x k 0 = X z = σ k=0 X k Z k
98 Ejemplo Determine la transformada Z de la sucesión: X k = 2 k k 0 Z 2 k = X z = k=0 2 k Zk = k=0 2 Z k
99 Ejemplo 2 k=0 Z k 2 1 = lim z k 1 2 z k = z Resolviendo el quebrado se tiene que: Z 2 k = z z 2 ( z > 2) Investigar: Región de Convergencia
100 Ejercicios

101 Me preparo

102 Me preparo
103 Transformada Inversa Z
104

105 Ejemplo Z 1 z z 2 = 2k
106 Resolver. Z 1 Ejemplo z (z 1)(z 2) Resolver por fracciones parciales. Como se trabajo en Laplace
107 Ejercicios
108 Ejercicios

109 Gracias por su atención al curso
UNIVERSIDAD DE ORIENTE NÚCLEO DE BOLÍVAR DEPARTAMENTO DE CIENCIAS ÁREA DE MATEMATICA CATEDRA MATEMATICA 4
 UNIVERSIDAD DE ORIENTE NÚCLEO DE BOLÍVAR DEPARTAMENTO DE CIENCIAS ÁREA DE MATEMATICA CATEDRA MATEMATICA 4 APLICACIONES DE LAS MATEMATICAS A LOS CIRCUITOS ELECTRICOS (RC, RL, RLC) Profesor: Cristian Castillo
UNIVERSIDAD DE ORIENTE NÚCLEO DE BOLÍVAR DEPARTAMENTO DE CIENCIAS ÁREA DE MATEMATICA CATEDRA MATEMATICA 4 APLICACIONES DE LAS MATEMATICAS A LOS CIRCUITOS ELECTRICOS (RC, RL, RLC) Profesor: Cristian Castillo
4.3 Problemas de aplicación 349
 4. Problemas de aplicación 49 4. Problemas de aplicación Ejemplo 4.. Circuito Eléctrico. En la figura 4.., se muestra un circuito Eléctrico de mallas en el cual se manejan corrientes, una en cada malla.
4. Problemas de aplicación 49 4. Problemas de aplicación Ejemplo 4.. Circuito Eléctrico. En la figura 4.., se muestra un circuito Eléctrico de mallas en el cual se manejan corrientes, una en cada malla.
Transformada de Laplace: Aplicación a vibraciones mecánicas
 Transformada de Laplace: Aplicación a vibraciones mecánicas Santiago Gómez Jorge Estudiante de Ingeniería Electrónica Universidad Nacional del Sur, Avda. Alem 1253, B8000CPB Bahía Blanca, Argentina thegrimreaper7@gmail.com
Transformada de Laplace: Aplicación a vibraciones mecánicas Santiago Gómez Jorge Estudiante de Ingeniería Electrónica Universidad Nacional del Sur, Avda. Alem 1253, B8000CPB Bahía Blanca, Argentina thegrimreaper7@gmail.com
(a, 0) + (b, 0) = (a + b, 0), (a, 0) (b, 0) = (ab, 0),
 + (b, 0) = (a + b, 0), (a, 0) (b, 0) = (ab, 0),") NÚMEROS COMPLEJOS 1. Preliminares Definición. Se llama número complejo a todo par ordenado de números reales. Si z = (a, b) es un número complejo, se dice que a es la parte real de z y b es la parte imaginaria
NÚMEROS COMPLEJOS 1. Preliminares Definición. Se llama número complejo a todo par ordenado de números reales. Si z = (a, b) es un número complejo, se dice que a es la parte real de z y b es la parte imaginaria
Transformada de Laplace - Conceptos Básicos. e -st f(t)dt. L { f (t) } = F(s) =
dt. L { f (t) } = F(s) =") Transformada de Laplace - Conceptos Básicos Definición: Sea f (t) una función de t definida para t > 0. La Transformada de Laplace de f(t) se define como: L { f (t) } = F(s) = 0 e -st f(t)dt Algunas Propiedades
Transformada de Laplace - Conceptos Básicos Definición: Sea f (t) una función de t definida para t > 0. La Transformada de Laplace de f(t) se define como: L { f (t) } = F(s) = 0 e -st f(t)dt Algunas Propiedades
Problemas resueltos de variable compleja con elementos de teoría. Ignacio Monterde, Vicente Montesinos.
 Problemas resueltos de variable compleja con elementos de teoría Ignacio Monterde, Vicente Montesinos. Índice general Introducción V 1. Teoría elemental 1 1.1. Elementos de teoría........................
Problemas resueltos de variable compleja con elementos de teoría Ignacio Monterde, Vicente Montesinos. Índice general Introducción V 1. Teoría elemental 1 1.1. Elementos de teoría........................
Algunas Aplicaciones de la Transformada de Laplace
 Algunas Aplicaciones de la Transformada de Laplace Dr. Andrés Pérez Escuela de Matemática Facultad de Ciencias Universidad Central de Venezuela 11 de marzo de 2016 A. Pérez Algunas Aplicaciones de la Contenido
Algunas Aplicaciones de la Transformada de Laplace Dr. Andrés Pérez Escuela de Matemática Facultad de Ciencias Universidad Central de Venezuela 11 de marzo de 2016 A. Pérez Algunas Aplicaciones de la Contenido
2. El conjunto de los números complejos
 Números complejos 1 Introducción El nacimiento de los números complejos se debió a la necesidad de dar solución a un problema: no todas las ecuaciones polinómicas poseen una solución real El ejemplo más
Números complejos 1 Introducción El nacimiento de los números complejos se debió a la necesidad de dar solución a un problema: no todas las ecuaciones polinómicas poseen una solución real El ejemplo más
IN ST IT UT O POLIT ÉCN ICO N A CION A L SECRETARÍA ACADÉMICA DIRECCIÓN DE ESTUDIOS PROFESIONALES EN INGENIERÍA Y CIENCIAS FÍSICO MATEMÁTICAS
 IN ST IT UT O POLIT ÉCN ICO N A CION A L PROGRAMA SINTÉTICO CARRERA: Ingeniería: Aeronáutica, en Control y Automatización, en Computación, en Comunicaciones y Electrónica, Eléctrica, Mecánica y en Robótica
IN ST IT UT O POLIT ÉCN ICO N A CION A L PROGRAMA SINTÉTICO CARRERA: Ingeniería: Aeronáutica, en Control y Automatización, en Computación, en Comunicaciones y Electrónica, Eléctrica, Mecánica y en Robótica
INDICE Capitulo 1. Variables del Circuito Eléctrico Capitulo 2. Elementos del Circuito Capitulo 3. Circuitos Resistivos
 INDICE Capitulo 1. Variables del Circuito Eléctrico 1 1.1. Albores de la ciencia eléctrica 2 1.2. Circuitos eléctricos y flujo de corriente 10 1.3. Sistemas de unidades 16 1.4. Voltaje 18 1.5. Potencia
INDICE Capitulo 1. Variables del Circuito Eléctrico 1 1.1. Albores de la ciencia eléctrica 2 1.2. Circuitos eléctricos y flujo de corriente 10 1.3. Sistemas de unidades 16 1.4. Voltaje 18 1.5. Potencia
PROBLEMAS QUE CONDUCEN A ECUACIONES DIFERENCIALES DE SEGUNDO ORDEN
 PROBLEMAS QUE CONDUCEN A ECUACIONES DIFERENCIALES DE SEGUNDO ORDEN Por Pedro Castañeda Porras. Master en Matemática Avanzada para la Ingeniería. Universidad de Pinar del Río, Martí Final, # 7. Pinar del
PROBLEMAS QUE CONDUCEN A ECUACIONES DIFERENCIALES DE SEGUNDO ORDEN Por Pedro Castañeda Porras. Master en Matemática Avanzada para la Ingeniería. Universidad de Pinar del Río, Martí Final, # 7. Pinar del
Proyecto Ecuaciones Diferenciales
 Proyecto Ecuaciones Diferenciales Ing. Roigo Alejano Gutiérrez Arenas Semestre 2010-II Instrucciones El proyecto consiste de dos problemas con varios incisos. Se debe de entregar un reporte detallado de
Proyecto Ecuaciones Diferenciales Ing. Roigo Alejano Gutiérrez Arenas Semestre 2010-II Instrucciones El proyecto consiste de dos problemas con varios incisos. Se debe de entregar un reporte detallado de
FACULTAD DE CIENCIAS EXACTAS, INGENIERÍA Y AGRIMENSURA U.N.R.
 FACULTAD DE CIENCIAS EXACTAS, INGENIERÍA Y AGRIMENSURA U.N.R. PROGRAMA ANALÍTICO DE LA ASIGNATURA: CALCULO I Código 1.1 PLAN DE ESTUDIOS: 2002 CARRERA: Profesorado en Matemática DEPARTAMENTO: Matemática
FACULTAD DE CIENCIAS EXACTAS, INGENIERÍA Y AGRIMENSURA U.N.R. PROGRAMA ANALÍTICO DE LA ASIGNATURA: CALCULO I Código 1.1 PLAN DE ESTUDIOS: 2002 CARRERA: Profesorado en Matemática DEPARTAMENTO: Matemática
Cálculo I (Grado en Ingeniería Informática) Problemas adicionales resueltos
 Problemas adicionales resueltos") Cálculo I (Grado en Ingeniería Informática) - Problemas adicionales resueltos Calcula el ĺımite lím ( n + n + n + ) n Racionalizando el numerador, obtenemos L lím ( n + n + n (n + n + ) (n + ) + ) lím
Cálculo I (Grado en Ingeniería Informática) - Problemas adicionales resueltos Calcula el ĺımite lím ( n + n + n + ) n Racionalizando el numerador, obtenemos L lím ( n + n + n (n + n + ) (n + ) + ) lím
EL NÚMERO COMPLEJO. Los números complejos. Distintas expresiones del número complejo. Operaciones con números complejos.
 EL NÚMERO COMPLEJO. Los números complejos. Distintas expresiones del número complejo. Operaciones con números complejos. 1. Introducción Los números complejos o imaginarios nacen de la necesidad de resolver
EL NÚMERO COMPLEJO. Los números complejos. Distintas expresiones del número complejo. Operaciones con números complejos. 1. Introducción Los números complejos o imaginarios nacen de la necesidad de resolver
CAMPOS ELECTROMAGNÉTICOS DEPENDIENTES DEL TIEMPO
 CAMPOS ELECTROMAGNÉTICOS DEPENDIENTES DEL TIEMPO PROBLEMAS PROPUESTOS 1:.Se coloca una bobina de 200 vueltas y 0,1 m de radio perpendicular a un campo magnético uniforme de 0,2 T. Encontrar la fem inducida
CAMPOS ELECTROMAGNÉTICOS DEPENDIENTES DEL TIEMPO PROBLEMAS PROPUESTOS 1:.Se coloca una bobina de 200 vueltas y 0,1 m de radio perpendicular a un campo magnético uniforme de 0,2 T. Encontrar la fem inducida
Matemáticas para estudiantes de Química
 Matemáticas para estudiantes de Química PROYECTO EDITORIAL BIBLIOTECA DE QUÍMICAS Director: Carlos Seoane Prado Catedrático de Química Orgánica Universidad Complutense de Madrid Matemáticas para estudiantes
Matemáticas para estudiantes de Química PROYECTO EDITORIAL BIBLIOTECA DE QUÍMICAS Director: Carlos Seoane Prado Catedrático de Química Orgánica Universidad Complutense de Madrid Matemáticas para estudiantes
Sílabo de Cálculo III
 Sílabo de Cálculo III I. Datos Generales Código Carácter UC0067 Obligatorio Créditos 5 Periodo Académico 2017 Prerrequisito Cálculo II Horas Teóricas 4 Prácticas 2 II. Sumilla de la Asignatura La asignatura
Sílabo de Cálculo III I. Datos Generales Código Carácter UC0067 Obligatorio Créditos 5 Periodo Académico 2017 Prerrequisito Cálculo II Horas Teóricas 4 Prácticas 2 II. Sumilla de la Asignatura La asignatura
INSTITUTO TECNOLOGICO DE LAS AMERICAS CARRERA DE TECNOLOGO EN DESARROLLO DE SOFTWARE PRECALCULO
 INSTITUTO TECNOLOGICO DE LAS AMERICAS CARRERA DE TECNOLOGO EN DESARROLLO DE SOFTWARE PRECALCULO Nombre de la asignatura: Nomenclatura del Curso: Prerrequisitos: Nomenclatura del prerrequisito Número de
INSTITUTO TECNOLOGICO DE LAS AMERICAS CARRERA DE TECNOLOGO EN DESARROLLO DE SOFTWARE PRECALCULO Nombre de la asignatura: Nomenclatura del Curso: Prerrequisitos: Nomenclatura del prerrequisito Número de
Los números complejos
 Universidad Autónoma de Madrid Actualización en Análisis Matemático, abril de 2012 Cardano (1501 1576) Dividir un segmento de longitud 10 en dos trozos tales que el rectángulo cuyos lados tienen la longitud
Universidad Autónoma de Madrid Actualización en Análisis Matemático, abril de 2012 Cardano (1501 1576) Dividir un segmento de longitud 10 en dos trozos tales que el rectángulo cuyos lados tienen la longitud
Determinación de la trasformada inversa mediante el uso de las fracciones parciales
 3.6. Determinación de la trasformada inversa mediante el uso de las fracciones parciales 95 3.6. Determinación de la trasformada inversa mediante el uso de las fracciones parciales Transformadas de Ecuaciones
3.6. Determinación de la trasformada inversa mediante el uso de las fracciones parciales 95 3.6. Determinación de la trasformada inversa mediante el uso de las fracciones parciales Transformadas de Ecuaciones
LA FORMA TRIGONOMETRICA DE LOS NUMEROS COMPLEJOS Y EL TEOREMA DE MOIVRE. Capítulo 7 Sec. 7.5 y 7.6
 LA FORMA TRIGONOMETRICA DE LOS NUMEROS COMPLEJOS Y EL TEOREMA DE MOIVRE Capítulo 7 Sec. 7.5 y 7.6 El Plano Complejo Se puede utilizar un plano de coordenadas para representar números complejos. Si cada
LA FORMA TRIGONOMETRICA DE LOS NUMEROS COMPLEJOS Y EL TEOREMA DE MOIVRE Capítulo 7 Sec. 7.5 y 7.6 El Plano Complejo Se puede utilizar un plano de coordenadas para representar números complejos. Si cada
PLAN DE CURSO PC-01 FO-TESE-DA-09 DIRECCIÓN ACADÉMICA DIVISIÓN DE INGENIERÍA ELECTRÓNICA. Según Corresponda CALCULO INTEGRAL TURNO: 1201/1 251
 No. DE EMPLEADO: SEMANA: 5 NO. DE ALUMNOS: O PROPOSITO GENERAL DE LA 1. Teorema fundamental del cálculo. - Contextualizar el concepto de - Visualizar la relación entre cálculo diferencial y el cálculo
No. DE EMPLEADO: SEMANA: 5 NO. DE ALUMNOS: O PROPOSITO GENERAL DE LA 1. Teorema fundamental del cálculo. - Contextualizar el concepto de - Visualizar la relación entre cálculo diferencial y el cálculo
Análisis Matemático I
 Análisis Matemático I Página 1 de 5 Programa de: Análisis Matemático I UNIVERSIDAD NACIONAL DE CÓRDOBA Facultad de Ciencias Exactas, Físicas y Naturales República Argentina Carrera: Ingeniería Biomédica
Análisis Matemático I Página 1 de 5 Programa de: Análisis Matemático I UNIVERSIDAD NACIONAL DE CÓRDOBA Facultad de Ciencias Exactas, Físicas y Naturales República Argentina Carrera: Ingeniería Biomédica
Análisis Matemático I
 Programa de: Hoja 1 de 5 Análisis Matemático I UNIVERSIDAD NACIONAL DE CORDOBA Código: Carrera: Materia común Res- Nº 298-HCD-04 Plan Puntos: 3 Escuela: Carga horaria: 72 hs. Hs. Semanales: 4,5 hs. Departamento:
Programa de: Hoja 1 de 5 Análisis Matemático I UNIVERSIDAD NACIONAL DE CORDOBA Código: Carrera: Materia común Res- Nº 298-HCD-04 Plan Puntos: 3 Escuela: Carga horaria: 72 hs. Hs. Semanales: 4,5 hs. Departamento:
Transformada de Laplace (material de apoyo)
") Transformada de Laplace (material de apoyo) André Luiz Fonseca de Oliveira Michel Hakas Resumen En este artículo se revisará los conceptos básicos para la utilización de la transformada de Laplace en la
Transformada de Laplace (material de apoyo) André Luiz Fonseca de Oliveira Michel Hakas Resumen En este artículo se revisará los conceptos básicos para la utilización de la transformada de Laplace en la
» Ecuación del movimiento libre de un grado de libertad amortiguado: ED lineal de 2º orden homogénea cuya solución es de la forma:
 1.3. Oscilador armónico amortiguado 1» Ecuación del movimiento libre de un grado de libertad amortiguado: ED lineal de 2º orden homogénea cuya solución es de la forma: Si introducimos esta solución en
1.3. Oscilador armónico amortiguado 1» Ecuación del movimiento libre de un grado de libertad amortiguado: ED lineal de 2º orden homogénea cuya solución es de la forma: Si introducimos esta solución en
CALCULO INTEGRAL 2AMB
 INSTITUTO TECNOLÓGICO SUPERIOR DEL SUR DEL ESTADO DE YUCATÁN Organismo Público Descentralizado del Gobierno del Estado de Yucatán CALCULO INTEGRAL 2AMB Horario: Martes: 9:30 a 11:30 Jueves: 8:30 a 9:30
INSTITUTO TECNOLÓGICO SUPERIOR DEL SUR DEL ESTADO DE YUCATÁN Organismo Público Descentralizado del Gobierno del Estado de Yucatán CALCULO INTEGRAL 2AMB Horario: Martes: 9:30 a 11:30 Jueves: 8:30 a 9:30
El cuerpo de los números complejos
 Capítulo 1 El cuerpo de los números complejos En este primer capítulo se revisan los conceptos elementales relativos a los números complejos. El capítulo comienza con una breve nota histórica y después
Capítulo 1 El cuerpo de los números complejos En este primer capítulo se revisan los conceptos elementales relativos a los números complejos. El capítulo comienza con una breve nota histórica y después
* e e Propiedades de la potenciación.
 ECUACIONES DIFERENCIALES 1 REPASO DE ALGUNOS CONCEPTOS PREVIOS AL ESTUDIO DE LAS ECUACIONES DIFERENCIALES 1. Cuando hablamos de una función en una variable escribíamos esta relación como y = f(x), esta
ECUACIONES DIFERENCIALES 1 REPASO DE ALGUNOS CONCEPTOS PREVIOS AL ESTUDIO DE LAS ECUACIONES DIFERENCIALES 1. Cuando hablamos de una función en una variable escribíamos esta relación como y = f(x), esta
PRECALCULO INSTITUTO TECNOLÒGICO DE LAS AMÈRICAS CARRERA DE TECNÓLOGO EN MECATRONICA. Precálculo. Nombre de la asignatura: MAT-001
 INSTITUTO TECNOLÒGICO DE LAS AMÈRICAS CARRERA DE TECNÓLOGO EN MECATRONICA PRECALCULO Nombre de la asignatura: Nomenclatura del Curso: Precálculo MAT-001 Prerrequisitos: Nomenclatura del prerrequisito Ninguno
INSTITUTO TECNOLÒGICO DE LAS AMÈRICAS CARRERA DE TECNÓLOGO EN MECATRONICA PRECALCULO Nombre de la asignatura: Nomenclatura del Curso: Precálculo MAT-001 Prerrequisitos: Nomenclatura del prerrequisito Ninguno
UNIVERSIDAD NACIONAL DE RÍO CUARTO FACULTAD DE CIENCIAS EXACTAS FÍSICO QUÍMICAS Y NATURALES DEPARTAMENTO DE MATEMÁTICA
 Universidad Nacional de Rio Cuarto Facultad de Ciencias Exactas, Físico-Químicas y Naturales UNIVERSIDAD NACIONAL DE RÍO CUARTO FACULTAD DE CIENCIAS EXACTAS FÍSICO QUÍMICAS Y NATURALES DEPARTAMENTO DE
Universidad Nacional de Rio Cuarto Facultad de Ciencias Exactas, Físico-Químicas y Naturales UNIVERSIDAD NACIONAL DE RÍO CUARTO FACULTAD DE CIENCIAS EXACTAS FÍSICO QUÍMICAS Y NATURALES DEPARTAMENTO DE
de diseño CAPÍTULO 4. Métodos de análisis de los circuitos resistivos 4.1. Reto de diseño: Indicación del ángulo de un potenciómetro 4.2. Circuitos el
 CAPÍTULO 1. VARIABLES DEL CIRCUITO ELÉCTRICO 1.1. Reto de diseño: Controlador de una válvula para tobera 1.2. Albores de la ciencia eléctrica 1.3. Circuitos eléctricos y flujo de corriente 1.4. Sistemas
CAPÍTULO 1. VARIABLES DEL CIRCUITO ELÉCTRICO 1.1. Reto de diseño: Controlador de una válvula para tobera 1.2. Albores de la ciencia eléctrica 1.3. Circuitos eléctricos y flujo de corriente 1.4. Sistemas
Métodos Matemáticos 2 Ecuaciones Diferenciales de Orden Superior
 Métodos Matemáticos 2 Ecuaciones Diferenciales de Orden Superior L. A. Núñez * Centro de Astrofísica Teórica, Departamento de Física, Facultad de Ciencias, Universidad de Los Andes, Mérida 5101, Venezuela
Métodos Matemáticos 2 Ecuaciones Diferenciales de Orden Superior L. A. Núñez * Centro de Astrofísica Teórica, Departamento de Física, Facultad de Ciencias, Universidad de Los Andes, Mérida 5101, Venezuela
INDICE Prefacio 1 Preliminares del cálculo: funciones y limites teoremas escogidos con demostraciones formales
 INDICE Prefacio XIII 1 Preliminares del cálculo: funciones y limites 1 1.1. Qué es el calculo? 3 1.1.1. el limite: la paradoja de Zenón 5 1.1.2. la derivada: el problema de la tangente 6 1.1.3. la integral:
INDICE Prefacio XIII 1 Preliminares del cálculo: funciones y limites 1 1.1. Qué es el calculo? 3 1.1.1. el limite: la paradoja de Zenón 5 1.1.2. la derivada: el problema de la tangente 6 1.1.3. la integral:
PROGRAMA INSTRUCCIONAL MATEMÁTICA IV
 UNIVERSIDAD FERMÍN TORO VICE RECTORADO ACADÉMICO FACULTAD DE INGENIERÍA ESCUELA DE COMPUTACIÓN PROGRAMA INSTRUCCIONAL MATEMÁTICA IV CÓDIGO ASIGNADO SEMESTRE U. C DENSIDAD HORARIA H.T H.P/H.L H.A THS/SEM
UNIVERSIDAD FERMÍN TORO VICE RECTORADO ACADÉMICO FACULTAD DE INGENIERÍA ESCUELA DE COMPUTACIÓN PROGRAMA INSTRUCCIONAL MATEMÁTICA IV CÓDIGO ASIGNADO SEMESTRE U. C DENSIDAD HORARIA H.T H.P/H.L H.A THS/SEM
XV EVENTO NACIONAL DE CIENCIAS BÁSICAS, 2007 REACTIVOS PROPUESTOS PARA LA ETAPA REGIONAL
 Anotar el nombre del Instituto Tecnológico al que pertenece el docente que elabora el reactivo I. TECNOLÓGICO DE APIZACO FECHA 08/JUNIO/007 NOMBRE DEL PROFESOR Nombre del profesor que envía el reactivo
Anotar el nombre del Instituto Tecnológico al que pertenece el docente que elabora el reactivo I. TECNOLÓGICO DE APIZACO FECHA 08/JUNIO/007 NOMBRE DEL PROFESOR Nombre del profesor que envía el reactivo
sobre un intervalo si para todo de se tiene que. Teorema 1 Sean y dos primitivas de la función en. Entonces,
 Integral indefinida Primitiva e integral indefinida. Cálculo de primitivas: métodos de integración. Integración por cambio de variable e integración por partes. Integración de funciones racionales e irracionales.
Integral indefinida Primitiva e integral indefinida. Cálculo de primitivas: métodos de integración. Integración por cambio de variable e integración por partes. Integración de funciones racionales e irracionales.
Departamento de Física Aplicada III
 Departamento de Física Aplicada III Escuela Superior de Ingenieros Camino de los Descubrimientos s/n 4109 Sevilla Examen de Campos electromagnéticos. o Curso de Ingeniería Industrial. Septiembre de 011
Departamento de Física Aplicada III Escuela Superior de Ingenieros Camino de los Descubrimientos s/n 4109 Sevilla Examen de Campos electromagnéticos. o Curso de Ingeniería Industrial. Septiembre de 011
INDICE Capítulo 1. Variables del Circuito Eléctrico Capítulo 2. Elementos de Circuitos Capítulo 3. Circuitos Resistivos
 INDICE Capítulo 1. Variables del Circuito Eléctrico 1 Introducción 1 1.1. Reto de diseño: Controlador de una válvula para tobera 2 1.2. Albores de la ciencia eléctrica 2 1.3. Circuitos eléctricos y flujo
INDICE Capítulo 1. Variables del Circuito Eléctrico 1 Introducción 1 1.1. Reto de diseño: Controlador de una válvula para tobera 2 1.2. Albores de la ciencia eléctrica 2 1.3. Circuitos eléctricos y flujo
2 OBJETIVOS TERMINALES: Al finalizar el curso el estudiante estará en capacidad de:
 MATERIA: Ecuaciones Diferenciales CÓDIGO: 08278 REQUISITOS: Cálculo en Varias Variables (08275) PROGRAMAS: Ingeniería Industrial, Ingeniería Telemática, Química PERIODO ACADÉMICO: 2016-2 INTENSIDAD SEMANAL:
MATERIA: Ecuaciones Diferenciales CÓDIGO: 08278 REQUISITOS: Cálculo en Varias Variables (08275) PROGRAMAS: Ingeniería Industrial, Ingeniería Telemática, Química PERIODO ACADÉMICO: 2016-2 INTENSIDAD SEMANAL:
2 o Bachillerato. Conceptos básicos
 Física 2 o Bachillerato Conceptos básicos Movimiento. Cambio de posición de un cuerpo respecto de un punto que se toma como referencia. Cinemática. Parte de la Física que estudia el movimiento de los cuerpos
Física 2 o Bachillerato Conceptos básicos Movimiento. Cambio de posición de un cuerpo respecto de un punto que se toma como referencia. Cinemática. Parte de la Física que estudia el movimiento de los cuerpos
Series Sucesiones y series en C
 Series En este capítulo vamos a estudiar desarrollos en serie de funciones holomorfas, para lo cual vamos en primer lugar a revisar resultados de la teoría de series, adaptándolos a series de términos
Series En este capítulo vamos a estudiar desarrollos en serie de funciones holomorfas, para lo cual vamos en primer lugar a revisar resultados de la teoría de series, adaptándolos a series de términos
INSTITUTO POLITÉCNICO NACIONAL SECRETARÍA ACADÉMICA DIRECCIÓN DE ESTUDIOS PROFESIONALES EN INGENIERÍA Y CIENCIAS FÍSICO MATEMÁTICA
 PROGRAMA SINTETICO CARRERA: Ingeniería en Comunicaciones y Electrónica ASIGNATURA: Transformadas de Funciones. SEMESTRE: Tercero OBJETIVO GENERAL: El alumno empleará las Transformadas de Funciones de Laplace,
PROGRAMA SINTETICO CARRERA: Ingeniería en Comunicaciones y Electrónica ASIGNATURA: Transformadas de Funciones. SEMESTRE: Tercero OBJETIVO GENERAL: El alumno empleará las Transformadas de Funciones de Laplace,
LISTA DE SÍMBOLOS. Capítulo 2 EJEMPLOS Y TEORIA DE LAS VIBRACIONES PARAMÉTRICAS 2.1 Introducción T - Periodo Ω - Frecuencia a- parámetro b- parámetro
 LISTA DE SÍMBOLOS Capítulo 2 EJEMPLOS Y TEORIA DE LAS VIBRACIONES PARAMÉTRICAS 2.1 Introducción T - Periodo Ω - Frecuencia a- parámetro b- parámetro 2.1.1 Rigidez Flexiva que Difiere en dos Ejes x- Desplazamiento
LISTA DE SÍMBOLOS Capítulo 2 EJEMPLOS Y TEORIA DE LAS VIBRACIONES PARAMÉTRICAS 2.1 Introducción T - Periodo Ω - Frecuencia a- parámetro b- parámetro 2.1.1 Rigidez Flexiva que Difiere en dos Ejes x- Desplazamiento
Ecuaciones Diferenciales
 PLANIFICACIÓN 2011 Ecuaciones Diferenciales INFRMACIÓN GENERAL Carrera Ingeniería en Recursos Hídricos Departamento Formación Básica Plan de Estudios Plan 2006 Carácter Cuatrimestral Equipo Docente SITI
PLANIFICACIÓN 2011 Ecuaciones Diferenciales INFRMACIÓN GENERAL Carrera Ingeniería en Recursos Hídricos Departamento Formación Básica Plan de Estudios Plan 2006 Carácter Cuatrimestral Equipo Docente SITI
Asignatura: SISTEMAS LINEALES. Horas/Semana:4 Teoría + 0 Laboratorio. Objetivos
 Asignatura: SISTEMAS LINEALES Curso académico: 2007/2008 Código: 590000804 Créditos: 6 Curso: 2 Horas/Semana:4 Teoría + 0 Laboratorio Departamento: ICS Objetivos 1() Para todas las titulaciones OBJETIVOS
Asignatura: SISTEMAS LINEALES Curso académico: 2007/2008 Código: 590000804 Créditos: 6 Curso: 2 Horas/Semana:4 Teoría + 0 Laboratorio Departamento: ICS Objetivos 1() Para todas las titulaciones OBJETIVOS
CAPACITORES INDUCTORES. Mg. Amancio R. Rojas Flores
 CAPACITORES E INDUCTORES Mg. Amancio R. Rojas Flores A diferencia de resistencias, que disipan la energía, condensadores e inductores no se disipan, pero almacenan energía, que puede ser recuperada en
CAPACITORES E INDUCTORES Mg. Amancio R. Rojas Flores A diferencia de resistencias, que disipan la energía, condensadores e inductores no se disipan, pero almacenan energía, que puede ser recuperada en
Resistencia de Materiales 1A. Profesor Herbert Yépez Castillo
 Resistencia de Materiales 1A Profesor Herbert Yépez Castillo 2014-2 2 Capítulo 5. Torsión 5.4 Ángulo 3 Un par es un momento que tiende a hacer girar respecto a su eje longitudinal. Su efecto es de interés
Resistencia de Materiales 1A Profesor Herbert Yépez Castillo 2014-2 2 Capítulo 5. Torsión 5.4 Ángulo 3 Un par es un momento que tiende a hacer girar respecto a su eje longitudinal. Su efecto es de interés
SISTEMAS LINEALES. Tema 6. Transformada Z
 SISTEMAS LINEALES Tema 6. Transformada Z 6 de diciembre de 200 F. JAVIER ACEVEDO javier.acevedo@uah.es TEMA 3 Contenidos. Autofunciones de los sistemas LTI discretos. Transformada Z. Región de convergencia
SISTEMAS LINEALES Tema 6. Transformada Z 6 de diciembre de 200 F. JAVIER ACEVEDO javier.acevedo@uah.es TEMA 3 Contenidos. Autofunciones de los sistemas LTI discretos. Transformada Z. Región de convergencia
La transformada de Laplace como aplicación en la resistencia de materiales
 Docencia La transformada de Laplace como aplicación en la resistencia de materiales Agustín Pacheco Cárdenas y Javier Alejandro Gómez Sánchez Facultad de Ingeniería, UAQ; Depto. Ciencias Básicas, ITQ Facultad
Docencia La transformada de Laplace como aplicación en la resistencia de materiales Agustín Pacheco Cárdenas y Javier Alejandro Gómez Sánchez Facultad de Ingeniería, UAQ; Depto. Ciencias Básicas, ITQ Facultad
TEMA I.2. Movimiento Ondulatorio Simple. Dr. Juan Pablo Torres-Papaqui
 TEMA I.2 Movimiento Ondulatorio Simple Dr. Juan Pablo Torres-Papaqui Departamento de Astronomía Universidad de Guanajuato DA-UG (México) papaqui@astro.ugto.mx División de Ciencias Naturales y Exactas,
TEMA I.2 Movimiento Ondulatorio Simple Dr. Juan Pablo Torres-Papaqui Departamento de Astronomía Universidad de Guanajuato DA-UG (México) papaqui@astro.ugto.mx División de Ciencias Naturales y Exactas,
Modelización por medio de sistemas
 SISTEMAS DE ECUACIONES DIFERENCIALES LINEALES. Modelización por medio de sistemas d y dy Ecuaciones autónomas de segundo orden: = f ( y, ) Una variable independiente. Una variable dependiente. La variable
SISTEMAS DE ECUACIONES DIFERENCIALES LINEALES. Modelización por medio de sistemas d y dy Ecuaciones autónomas de segundo orden: = f ( y, ) Una variable independiente. Una variable dependiente. La variable
CONTENIDO PRÓLOGO LAS FUNCIONES... 5
 CONTENIDO PRÓLOGO... 1 1. LAS FUNCIONES... 5 1.1 FORMAS DE REPRESENTACIÓN... 5 1.1.1 Representación de funciones... 6 1.1.2 Funciones definidas a trozos... 7 1.1.3 Simetría... 8 1.1.4 Funciones crecientes
CONTENIDO PRÓLOGO... 1 1. LAS FUNCIONES... 5 1.1 FORMAS DE REPRESENTACIÓN... 5 1.1.1 Representación de funciones... 6 1.1.2 Funciones definidas a trozos... 7 1.1.3 Simetría... 8 1.1.4 Funciones crecientes
Unidad 2: Ecuaciones, inecuaciones y sistemas.
 Unidad 2: Ecuaciones, inecuaciones y sistemas 1 Unidad 2: Ecuaciones, inecuaciones y sistemas. 1.- Factorización de polinomios. M. C. D y m.c.m de polinomios. Un número a es raíz de un polinomio es 0.
Unidad 2: Ecuaciones, inecuaciones y sistemas 1 Unidad 2: Ecuaciones, inecuaciones y sistemas. 1.- Factorización de polinomios. M. C. D y m.c.m de polinomios. Un número a es raíz de un polinomio es 0.
Figura 1. Circuito RLC
 APLIAIÓN: EL IRUITO RL. Al comienzo del tema de las E.D.O lineales de segundo orden hemos visto como estas ecuaciones sirven para modelizar distintos sitemas físicos. En concreto el circuito RL. Figura
APLIAIÓN: EL IRUITO RL. Al comienzo del tema de las E.D.O lineales de segundo orden hemos visto como estas ecuaciones sirven para modelizar distintos sitemas físicos. En concreto el circuito RL. Figura
CURSO: CONTROL AUTOMATICO PROFESOR: MSC. CESAR LOPEZ AGUILAR
 SEMANA 10 CURSO: CONTROL AUTOMATICO PROFESOR: MSC. CESAR LOPEZ AGUILAR TRANSFORMADA DE LA PLACE I. OBJETIVO Solucionar ecuaciones diferenciales mediante la transformada de la place. III. BIBLIOGRAFIA W.
SEMANA 10 CURSO: CONTROL AUTOMATICO PROFESOR: MSC. CESAR LOPEZ AGUILAR TRANSFORMADA DE LA PLACE I. OBJETIVO Solucionar ecuaciones diferenciales mediante la transformada de la place. III. BIBLIOGRAFIA W.
Carrera: EMM Participantes. Representantes de las academias de ingeniería en Electromecánica de los Institutos Tecnológicos.
 .- DATOS DE LA ASIGNATURA Nombre de la asignatura: Carrera: Clave de la asignatura: Horas teoría-horas práctica-créditos Análisis de circuitos eléctricos I Ingeniería Electromecánica EMM-00 --8.- HISTORIA
.- DATOS DE LA ASIGNATURA Nombre de la asignatura: Carrera: Clave de la asignatura: Horas teoría-horas práctica-créditos Análisis de circuitos eléctricos I Ingeniería Electromecánica EMM-00 --8.- HISTORIA
Representación en el espacio de estado. Sistemas Control Embebidos e Instrumentación Electrónica UNIVERSIDAD EAFIT
 Representación en el espacio de estado Representación en espacio de estado Control clásico El modelado y control de sistemas basado en la transformada de Laplace, es un enfoque muy sencillo y de fácil
Representación en el espacio de estado Representación en espacio de estado Control clásico El modelado y control de sistemas basado en la transformada de Laplace, es un enfoque muy sencillo y de fácil
1. Modelos Matemáticos y Experimentales 1
 . Modelos Matemáticos y Experimentales. Modelos Matemáticos y Experimentales.. Definición.. Tipos de Procesos.3. Tipos de Modelos 3.4. Transformada de Laplace 4.5. Función de Transferencia 7.6. Función
. Modelos Matemáticos y Experimentales. Modelos Matemáticos y Experimentales.. Definición.. Tipos de Procesos.3. Tipos de Modelos 3.4. Transformada de Laplace 4.5. Función de Transferencia 7.6. Función
Trabajo Práctico n 2. Robotización de un Puente Grúa. Presentación. Restricciones. Curso 2011
 Trabajo Práctico n 2 Robotización de un Puente Grúa Presentación Este problema consiste en desarrollar un sistema de control automático que permita robotizar la operación de un puente grúa para la carga
Trabajo Práctico n 2 Robotización de un Puente Grúa Presentación Este problema consiste en desarrollar un sistema de control automático que permita robotizar la operación de un puente grúa para la carga
2 Métodos de solución de ED de primer orden
 CAPÍTULO Métodos de solución de ED de primer orden.4 Ecuaciones diferenciales de Bernoulli Una ecuación diferencial ordinaria de primer orden de la forma a 0.x/y 0 C a.x/y D f.x/y r ; con r 0; : se denomina
CAPÍTULO Métodos de solución de ED de primer orden.4 Ecuaciones diferenciales de Bernoulli Una ecuación diferencial ordinaria de primer orden de la forma a 0.x/y 0 C a.x/y D f.x/y r ; con r 0; : se denomina
Ecuaciones Diferenciales Ordinarias
 Ecuaciones Diferenciales Ordinarias (Transformada de Laplace) Julio López jclopez@dim.uchile.cl Depto Ingeniería Matemática, Universidad de Chile Verano 2010, Resumen clases Julio López EDO 1/30 Introducción
Ecuaciones Diferenciales Ordinarias (Transformada de Laplace) Julio López jclopez@dim.uchile.cl Depto Ingeniería Matemática, Universidad de Chile Verano 2010, Resumen clases Julio López EDO 1/30 Introducción
Corriente Directa. La batería se define como fuente de fem
 Capítulo 28 Circuitos de Corriente Directa Corriente Directa Cuando la corriente en un circuito tiene una magnitud y una dirección ambas constantes, la corriente se llama corriente directa Como la diferencia
Capítulo 28 Circuitos de Corriente Directa Corriente Directa Cuando la corriente en un circuito tiene una magnitud y una dirección ambas constantes, la corriente se llama corriente directa Como la diferencia
INST IT UT O POLIT ÉCNICO NA CIONA L SECRETARÍA ACADÉMICA DIRECCIÓN DE ESTUDIOS PROFESIONALES EN INGENIERÍA Y CIENCIAS FÍSICO MATEMÁTICAS
 INST IT UT O POLIT ÉCNICO NA CIONA L PROGRAMA SINTÉTICO CARRERA: Ingeniería: Aeronáutica, en Computación, en Comunicaciones y Electrónica, en Control y Automatización, Eléctrica. ASIGNATURA: Ecuaciones
INST IT UT O POLIT ÉCNICO NA CIONA L PROGRAMA SINTÉTICO CARRERA: Ingeniería: Aeronáutica, en Computación, en Comunicaciones y Electrónica, en Control y Automatización, Eléctrica. ASIGNATURA: Ecuaciones
Guía Docente de Fundamentos Físicos de la Robótica
 Guía Docente de Fundamentos Físicos de la Robótica 1. ESQUEMA GENERAL 1.1.- Datos identificativos Universidad: Politécnica de Valencia Centro: E.T.S. de Informática Aplicada Título: Ingeniero Técnico en
Guía Docente de Fundamentos Físicos de la Robótica 1. ESQUEMA GENERAL 1.1.- Datos identificativos Universidad: Politécnica de Valencia Centro: E.T.S. de Informática Aplicada Título: Ingeniero Técnico en
PRECALCULO. Nomenclatura del Curso : MAT-001. Nombre del Curso : Precalculo. Prerrequisitos : Ninguno. Número de Créditos : 5. Horas Teóricas : 45
 Nomenclatura del Curso : MAT-001 Nombre del Curso : Precalculo Prerrequisitos : Ninguno Número de Créditos : 5 Horas Teóricas : 45 Horas prácticas : 30 Horas Investigación : 45 Docente : INTRODUCCION PRECALCULO
Nomenclatura del Curso : MAT-001 Nombre del Curso : Precalculo Prerrequisitos : Ninguno Número de Créditos : 5 Horas Teóricas : 45 Horas prácticas : 30 Horas Investigación : 45 Docente : INTRODUCCION PRECALCULO
COEFICIENTES INDETERMINADOS: MÉTODO DE SUPERPOSICIÓN *
 40 CAPÍTULO 4 ECUACIONES DIFERENCIALES DE ORDEN SUPERIOR 5. Determine la solución general de y 6y y 34y 0 si se sabe que y e 4x cos x es una solución. 52. Para resolver y (4) y 0, es necesario encontrar
40 CAPÍTULO 4 ECUACIONES DIFERENCIALES DE ORDEN SUPERIOR 5. Determine la solución general de y 6y y 34y 0 si se sabe que y e 4x cos x es una solución. 52. Para resolver y (4) y 0, es necesario encontrar
La Ecuación de Schrödinger
 La Ecuación de Schrödinger Dr. Héctor René VEGA CARRILLO Notas del curso de Física Moderna Unidad Académica de Ingeniería Eléctrica Universidad Autónoma de Zacatecas Buzón electrónico: fermineutron@yahoo.com
La Ecuación de Schrödinger Dr. Héctor René VEGA CARRILLO Notas del curso de Física Moderna Unidad Académica de Ingeniería Eléctrica Universidad Autónoma de Zacatecas Buzón electrónico: fermineutron@yahoo.com
IX. Análisis dinámico de fuerzas
 Objetivos: IX. Análisis dinámico de fuerzas 1. Comprender la diferencia entre masa y peso. 2. Comprender como calcular el momento de masa de inercia de un objeto. 3. Recordar el teorema de ejes paralelos.
Objetivos: IX. Análisis dinámico de fuerzas 1. Comprender la diferencia entre masa y peso. 2. Comprender como calcular el momento de masa de inercia de un objeto. 3. Recordar el teorema de ejes paralelos.
TEMA 3 SISTEMAS DE 1 GRADO DE LIBERTAD. Sistemas de 1 Grado de Libertad
 Sistemas de Grado de Libertad ELEMENTOS DE MÁQUINAS Y VIBRACIONES - 3. - ELEMENTOS DE MÁQUINAS Y VIBRACIONES - 3. - 3. Introducción Se estudian aquí las vibraciones de sistemas con un grado de libertad,
Sistemas de Grado de Libertad ELEMENTOS DE MÁQUINAS Y VIBRACIONES - 3. - ELEMENTOS DE MÁQUINAS Y VIBRACIONES - 3. - 3. Introducción Se estudian aquí las vibraciones de sistemas con un grado de libertad,
METODO DE LOS COEFICIENTES INDETERMINADOS 1 METODO DE COEFICIENTES INDETERMINADOS
 METODO DE LOS COEFICIENTES INDETERMINADOS 1 METODO DE COEFICIENTES INDETERMINADOS Para encontrar la solución de la Ecuacion diferencial de orden n definida por Donde los son constantes y f(x) es un función
METODO DE LOS COEFICIENTES INDETERMINADOS 1 METODO DE COEFICIENTES INDETERMINADOS Para encontrar la solución de la Ecuacion diferencial de orden n definida por Donde los son constantes y f(x) es un función
Unidad IV: Sistemas de ecuaciones diferenciales lineales
 Unidad IV: Sistemas de ecuaciones diferenciales lineales 4.1 Teoría preliminar 4.1.1 Sistemas de EDL Los problemas de la vida real pueden representarse de mejor manera con la ayuda de múltiples variables.
Unidad IV: Sistemas de ecuaciones diferenciales lineales 4.1 Teoría preliminar 4.1.1 Sistemas de EDL Los problemas de la vida real pueden representarse de mejor manera con la ayuda de múltiples variables.
Universidad de Guanajuato Tronco Común de Ingnierías
 Objetivo del Area. Programa. Universidad de Guanajuato Tronco Común de Ingnierías Diseñar modelos matemáticos y proponer alternativas de solución a problemas. AREA: Matemáticas MATERIA: Cálculo II CLAVE:
Objetivo del Area. Programa. Universidad de Guanajuato Tronco Común de Ingnierías Diseñar modelos matemáticos y proponer alternativas de solución a problemas. AREA: Matemáticas MATERIA: Cálculo II CLAVE:
Asignatura: SISTEMAS LINEALES. Horas/Semana:4 Teoría + 0 Laboratorio. Objetivos. Programa
 Asignatura: SISTEMAS LINEALES Curso académico: 2012/2013 Código: 590000628 Créditos: 6 Curso: 2 Horas/Semana:4 Teoría + 0 Laboratorio Departamento: ICS Objetivos 1() Para todas las titulaciones OBJETIVOS
Asignatura: SISTEMAS LINEALES Curso académico: 2012/2013 Código: 590000628 Créditos: 6 Curso: 2 Horas/Semana:4 Teoría + 0 Laboratorio Departamento: ICS Objetivos 1() Para todas las titulaciones OBJETIVOS
Ejercicios Resueltos de Cálculo III.
 Ejercicios Resueltos de Cálculo III. 1.- Considere y. a) Demuestre que las rectas dadas se cortan. Encuentre el punto de intersección. b) Encuentre una ecuación del plano que contiene a esas rectas. Como
Ejercicios Resueltos de Cálculo III. 1.- Considere y. a) Demuestre que las rectas dadas se cortan. Encuentre el punto de intersección. b) Encuentre una ecuación del plano que contiene a esas rectas. Como
PLAN DE ESTUDIOS DE MS
 PLAN DE ESTUDIOS DE MS Temario para desarrollar a lo largo de las clases 11 y 12. CLASE 11: I. ELEMENTOS DE ÁLGEBRA LINEAL. a) Revisión de conceptos Estructura de espacio vectorial. Propiedades de los
PLAN DE ESTUDIOS DE MS Temario para desarrollar a lo largo de las clases 11 y 12. CLASE 11: I. ELEMENTOS DE ÁLGEBRA LINEAL. a) Revisión de conceptos Estructura de espacio vectorial. Propiedades de los
Nombre: Curso:_3. Si la fuerza se mide en newton (N) y el vector posición en metro (m), el torque se mide en N m.
 y el vector posición en metro (m), el torque se mide en N m.") Nombre: Curso:_3 Cuando un cuerpo están sometidos a una fuerzas neta nula es posible que el cuerpo este en reposo de traslación pero no en reposo de rotación, por ejemplo es posible que existan dos o más
Nombre: Curso:_3 Cuando un cuerpo están sometidos a una fuerzas neta nula es posible que el cuerpo este en reposo de traslación pero no en reposo de rotación, por ejemplo es posible que existan dos o más
TEMA II: CINEMÁTICA I
 1 TEMA II: CINEMÁTICA I 1- LA MECÁNICA La Mecánica es la parte de la física que estudia el movimiento de los cuerpos. Puede subdividirse en dos bloques: Cinemática: trata el movimiento sin ocuparse de
1 TEMA II: CINEMÁTICA I 1- LA MECÁNICA La Mecánica es la parte de la física que estudia el movimiento de los cuerpos. Puede subdividirse en dos bloques: Cinemática: trata el movimiento sin ocuparse de
Álgebra Lineal II: Grupos y campos, prueba de los axiomas del campo de los números complejos, forma polar de números complejos.
 Álgebra Lineal II: Grupos y campos, prueba de los axiomas del campo de los números complejos, forma polar de números complejos. José María Rico Martínez Departamento de Ingeniería Mecánica División de
Álgebra Lineal II: Grupos y campos, prueba de los axiomas del campo de los números complejos, forma polar de números complejos. José María Rico Martínez Departamento de Ingeniería Mecánica División de
La cuerda vibrante. inicialmente se encuentra sobre el eje de abscisas x la posición de un punto de la cuerda viene descrita por su posición vertical
 la cuerda es extensible La cuerda vibrante inicialmente se encuentra sobre el eje de abscisas x la posición de un punto de la cuerda viene descrita por su posición vertical y(x, t) la posición depende
la cuerda es extensible La cuerda vibrante inicialmente se encuentra sobre el eje de abscisas x la posición de un punto de la cuerda viene descrita por su posición vertical y(x, t) la posición depende
Derivadas 6 ACTIVIDADES. 1. Página 140. Función f(x) x 2 1: Función g(x) x 3 7: 2. Página Página Página
 x 2 1: Función g(x) x 3 7: 2. Página Página Página") Derivadas 6 ACTIVIDADES 1. Página 140 Función f(x) x 2 1: Función g(x) x 3 7: 2. Página 140 3. Página 141 4. Página 141 5. Página 142 211 Derivadas 6. Página 142 Las derivadas laterales no existen, por
Derivadas 6 ACTIVIDADES 1. Página 140 Función f(x) x 2 1: Función g(x) x 3 7: 2. Página 140 3. Página 141 4. Página 141 5. Página 142 211 Derivadas 6. Página 142 Las derivadas laterales no existen, por
Cálculo en varias variables
 Cálculo en varias variables Dpto. Matemática Aplicada Universidad de Málaga Resumen Límites y continuidad Funciones de varias variables Límites y continuidad en varias variables 1 Límites y continuidad
Cálculo en varias variables Dpto. Matemática Aplicada Universidad de Málaga Resumen Límites y continuidad Funciones de varias variables Límites y continuidad en varias variables 1 Límites y continuidad
Comprobar experimentalmente la ley de Ohm y las reglas de Kirchhoff. Determinar el valor de resistencias.
 38 6. LEY DE OHM. REGLAS DE KIRCHHOFF Objetivo Comprobar experimentalmente la ley de Ohm y las reglas de Kirchhoff. Determinar el valor de resistencias. Material Tablero de conexiones, fuente de tensión
38 6. LEY DE OHM. REGLAS DE KIRCHHOFF Objetivo Comprobar experimentalmente la ley de Ohm y las reglas de Kirchhoff. Determinar el valor de resistencias. Material Tablero de conexiones, fuente de tensión
Forma polar de números complejos (repaso breve)
") Forma polar de números complejos (repaso breve) Objetivos. pasar la forma polar de números complejos. quisitos. Números complejos, funciones trigonométricas, valor absoluto de números complejos, circunferencia
Forma polar de números complejos (repaso breve) Objetivos. pasar la forma polar de números complejos. quisitos. Números complejos, funciones trigonométricas, valor absoluto de números complejos, circunferencia
Corriente continua : Condensadores y circuitos RC
 Corriente continua : Condensadores y circuitos RC Marcos Flores Carrasco Departamento de Física mflorescarra@ing.uchile.cl Tópicos introducción Condensadores Energia electroestática Capacidad Asociación
Corriente continua : Condensadores y circuitos RC Marcos Flores Carrasco Departamento de Física mflorescarra@ing.uchile.cl Tópicos introducción Condensadores Energia electroestática Capacidad Asociación
CÁLCULO II. Grado M+I. Sucesiones y series de funciones. Sucesiones y series de funciones 1 / 27. Grado M+I () CÁLCULO II
 CÁLCULO II") CÁLCULO II Grado M+I Sucesiones y series de funciones Sucesiones y series de funciones 1 / Sucesiones funciones. Convergencia puntual Sucesión de funciones Definición Una sucesión de funciones será cualquier
CÁLCULO II Grado M+I Sucesiones y series de funciones Sucesiones y series de funciones 1 / Sucesiones funciones. Convergencia puntual Sucesión de funciones Definición Una sucesión de funciones será cualquier
Si conocemos x(n) y obtenemos la salida del sistema podemos determinar la respuesta al impulso del sistema obteniendo en primer lugar H(z) con: = n(
 y obtenemos la salida del sistema podemos determinar la respuesta al impulso del sistema obteniendo en primer lugar H(z) con: = n(") 58 Funciones de transferencia de sistemas LTI Como ya conocemos la salida de un sistema LTI en el tiempo (en reposo) para una secuencia de entrada x(n) se podía obtener como la convolución de esa secuencia
58 Funciones de transferencia de sistemas LTI Como ya conocemos la salida de un sistema LTI en el tiempo (en reposo) para una secuencia de entrada x(n) se podía obtener como la convolución de esa secuencia
Apuntes sobre algunos teoremas fundamentales de análisis complejo, con 20 ejemplos resueltos (2007-08)
") Variable Compleja I (3 o de Matemáticas) Apuntes sobre algunos teoremas fundamentales de análisis complejo, con ejemplos resueltos (7-8) En estos apuntes, consideraremos las funciones anaĺıticas (holomorfas)
Variable Compleja I (3 o de Matemáticas) Apuntes sobre algunos teoremas fundamentales de análisis complejo, con ejemplos resueltos (7-8) En estos apuntes, consideraremos las funciones anaĺıticas (holomorfas)
Titulación: Asignatura: Código: Año: Periodo: Carácter: Nº de Créditos: Departamento: Área de Conocimiento: Curso: OBJETIVOS DOCENTES
 Titulación: Asignatura: Código: Año: Periodo: Carácter: Nº de Créditos: Departamento: Área de Conocimiento: Curso: OBJETIVOS DOCENTES Ingeniero en Telecomunicación Fundamentos Matemáticos de la Ingeniería
Titulación: Asignatura: Código: Año: Periodo: Carácter: Nº de Créditos: Departamento: Área de Conocimiento: Curso: OBJETIVOS DOCENTES Ingeniero en Telecomunicación Fundamentos Matemáticos de la Ingeniería
Problemario de la asignatura de Ecuaciones Diferenciales
 Problemario de la asignatura de Ecuaciones Diferenciales Alejandro Hernández Madrigal Maxvell Jiménez Escamilla Academia de Matemáticas y Física Unidad Profesional Interdisciplinaria de Biotecnología,
Problemario de la asignatura de Ecuaciones Diferenciales Alejandro Hernández Madrigal Maxvell Jiménez Escamilla Academia de Matemáticas y Física Unidad Profesional Interdisciplinaria de Biotecnología,
Análisis Dinámico: Ecuaciones diferenciales
 Análisis Dinámico: Jesús Getán y Eva Boj Facultat d Economia i Empresa Universitat de Barcelona Marzo de 2014 Jesús Getán y Eva Boj Análisis Dinámico: 1 / 51 Introducción Solución genérica Solución de
Análisis Dinámico: Jesús Getán y Eva Boj Facultat d Economia i Empresa Universitat de Barcelona Marzo de 2014 Jesús Getán y Eva Boj Análisis Dinámico: 1 / 51 Introducción Solución genérica Solución de
Repaso del 1º trimestre: ondas y gravitación 11/01/08. Nombre: Elige en cada bloque una de las dos opciones.
 Repaso del 1º trimestre: ondas y gravitación 11/01/08 DEPARTAMENTO DE FÍSICA E QUÍMICA Nombre: Elige en cada bloque una de las dos opciones. Bloque 1. GRAVITACIÓN. Elige un problema: puntuación 3 puntos
Repaso del 1º trimestre: ondas y gravitación 11/01/08 DEPARTAMENTO DE FÍSICA E QUÍMICA Nombre: Elige en cada bloque una de las dos opciones. Bloque 1. GRAVITACIÓN. Elige un problema: puntuación 3 puntos
CÁLCULO INTEGRAL TEMARIO
 CÁLCULO INTEGRAL TEMARIO 1. LA INTEGRAL 1.1 La integral indefinida Antiderivadas o primitivas. Funciones con la misma derivada. Antiderivada general. Antiderivada particular. Integral indefinida. Elementos
CÁLCULO INTEGRAL TEMARIO 1. LA INTEGRAL 1.1 La integral indefinida Antiderivadas o primitivas. Funciones con la misma derivada. Antiderivada general. Antiderivada particular. Integral indefinida. Elementos
 Universidad
Universidad Respuesta libre en circuitos de primer orden
 espuesta libre en circuitos de primer orden Objetivos a) Establecer los conceptos más generales sobre los procesos que ocurren en los circuitos dinámicos, utilizando los criterios dados en el texto y en
espuesta libre en circuitos de primer orden Objetivos a) Establecer los conceptos más generales sobre los procesos que ocurren en los circuitos dinámicos, utilizando los criterios dados en el texto y en
CIRCUITO 1: CIRCUITO RC
 CIRCUITOS DIDACTICOS DE LA MATERIA DE DISPOSITIVOS Y CIRCUTOS ELECTRONICOS Y DE DISEÑO DE SISTEMAS DIGITALES. JUSTIFICACION. Los siguientes circuitos son considerados ejemplos didácticos y representativos
CIRCUITOS DIDACTICOS DE LA MATERIA DE DISPOSITIVOS Y CIRCUTOS ELECTRONICOS Y DE DISEÑO DE SISTEMAS DIGITALES. JUSTIFICACION. Los siguientes circuitos son considerados ejemplos didácticos y representativos
CAMPOS ELÉCTRICOS DEBIDOS A DISTRIBUCIONES CONTINUAS DE CARGA
 CAMPOS ELÉCTRICOS DEBIDOS A DISTRIBUCIONES CONTINUAS DE CARGA Este documento enuncia de forma más detallada la formulación matemática que permite el estudio de campos eléctricos debido a distribuciones
CAMPOS ELÉCTRICOS DEBIDOS A DISTRIBUCIONES CONTINUAS DE CARGA Este documento enuncia de forma más detallada la formulación matemática que permite el estudio de campos eléctricos debido a distribuciones
Momento angular o cinético
 Momento angular o cinético Definición de momento angular o cinético Consideremos una partícula de masa m, con un vector de posición r y que se mueve con una cantidad de movimiento p = mv z L p O r y x
Momento angular o cinético Definición de momento angular o cinético Consideremos una partícula de masa m, con un vector de posición r y que se mueve con una cantidad de movimiento p = mv z L p O r y x
Respuesta transitoria
 Capítulo 4 Respuesta transitoria Una ves que los diagramas a bloques son desarrollados, el siguiente paso es llevar a cabo el análisis de los sistemas. Existen dos tipos de análisis: cuantitativo y cualitativo.
Capítulo 4 Respuesta transitoria Una ves que los diagramas a bloques son desarrollados, el siguiente paso es llevar a cabo el análisis de los sistemas. Existen dos tipos de análisis: cuantitativo y cualitativo.