04 - Elementos de finitos de flexión de vigas. Diego Andrés Alvarez Marín Profesor Asociado Universidad Nacional de Colombia Sede Manizales
|
|
|
- Ana María Lourdes Maldonado Giménez
- hace 6 años
- Vistas:
Transcripción

1 04 - Elementos de finitos de flexión de vigas Diego Andrés Alvarez Marín Profesor Asociado Universidad Nacional de Colombia Sede Manizales 1
2 Contenido Viga de Euler-Bernoulli Viga de Timoshenko Problema del bloqueo de por cortante (shear locking) Integración reducida Imposición del campo de deformación por cortante 2
3 Teoría de Euler-Bernoulli Los desplazamientos verticales (flechas) de todos los puntos de una sección transversal son pequeños e iguales a los del eje de la viga. El desplazamiento lateral es nulo (esto es el coeficiente de Poisson se asume cero). Las secciones transversales normales al eje de la viga antes de la deformación, permanecen planas y ortogonales a dicho eje después de la deformación. 3
4 4

5 Campo de desplazamientos De acuerdo con las hipótesis anteriores el campo de desplazamientos de un punto cualquiera se puede escribir como: 5
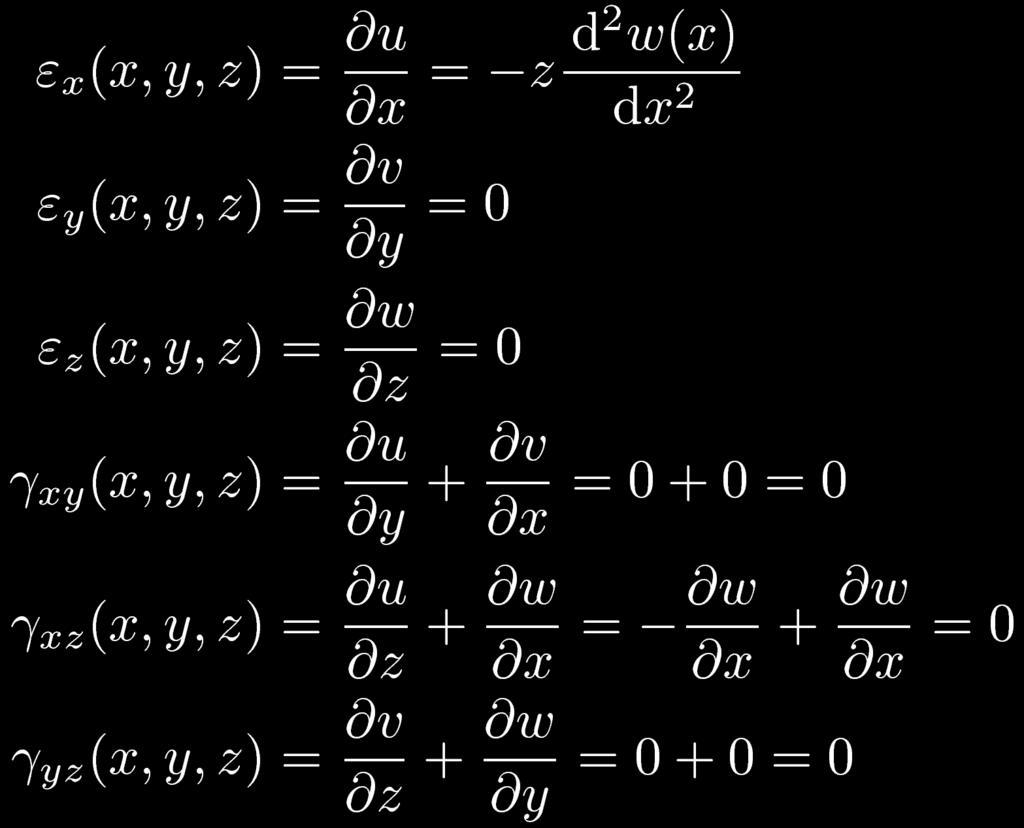
6 Campo de deformaciones 6
7 Campo de esfuerzos Al reemplazar en la ley de Hooke usando un coeficiente de Poisson igual cero se obtiene: siendo los otros esfuerzos nulos.

8 Momento flector Observe que aquí el momento negativo produce tracción en la fibra superior 8
9 Momento flector 9
10 Momento de inercia Centro de gravedad, área y momento de inercia al rededor del eje y para algunas secciones transversales de viga 10

11 Sentidos positivos de la carga 11

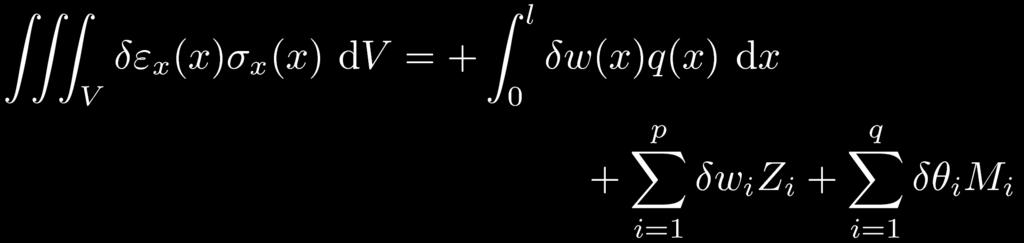
12 PTV para vigas
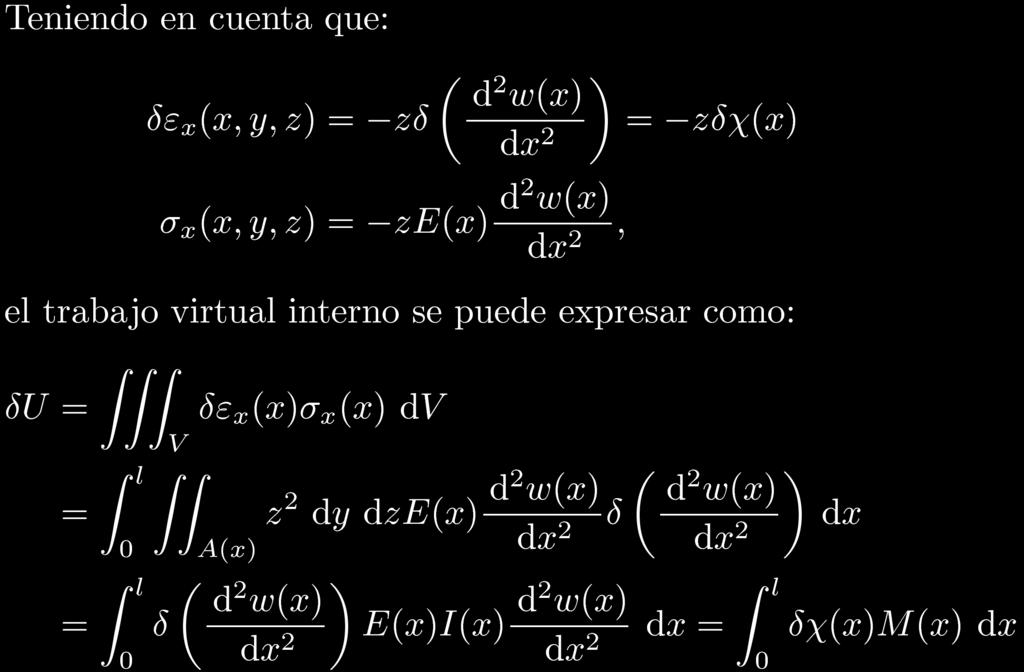
13 13

14 + + 14



15 Ecuaciones diferenciales de la viga de Euler-Bernoulli + -q q es positiva hacia arriba + Aquí se hace la sumatoria de momentos 15

16 Solución mediante el comando bvp5c de MATLAB 16
 Se obtiene")

17 Solución mediante el comando bvp5c de MATLAB (para E, I constantes) Se obtiene por lo tanto el sistema de ecuaciones: La solución de este sistema con bpv5c brindará: 17
18 Condiciones de apoyo Q Q 18

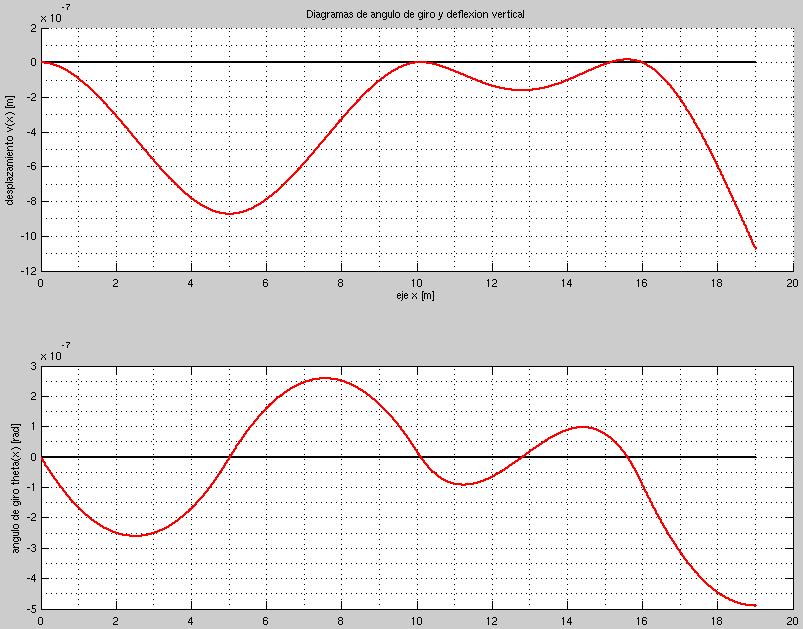
19 EJEMPLO 1 19

20 20
21 EJEMPLO 2 21
22 22
23 23

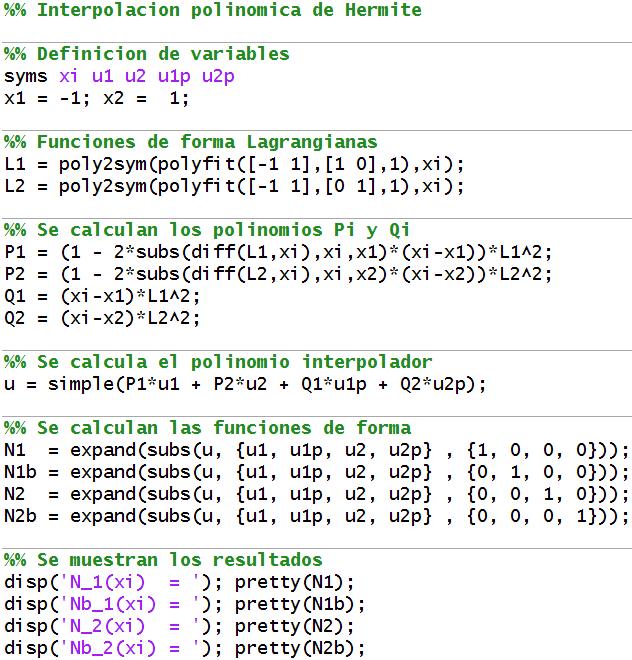
24 Interpolación polinómica de Hermite Polinomio interpolador de Lagrange 24

25 Interpolación polinómica de Hermite 25
26 26


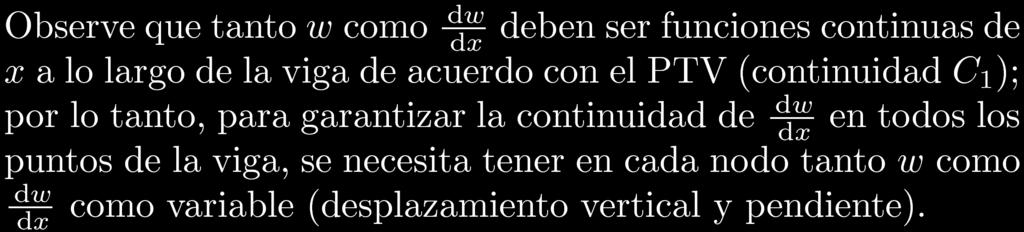
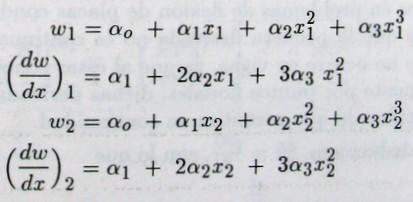
27 Elemento finito hermítico de dos nodos 27
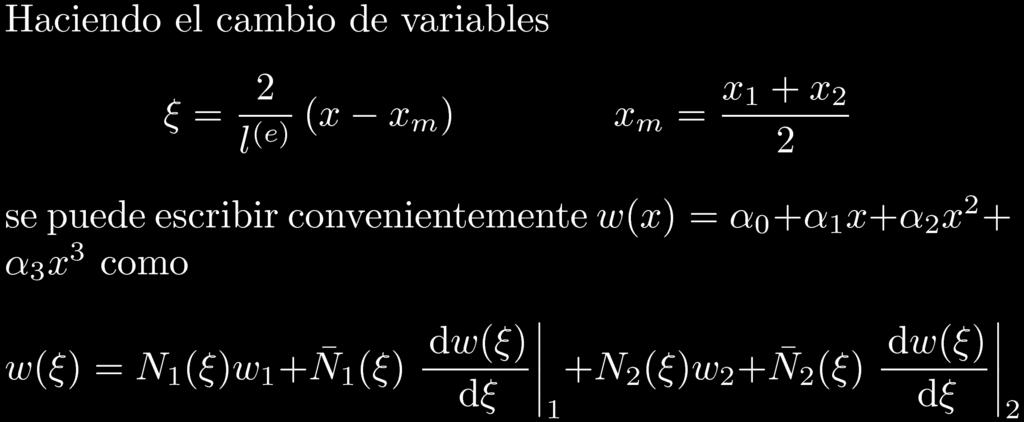
28 28

29 29
30 O sea: 30
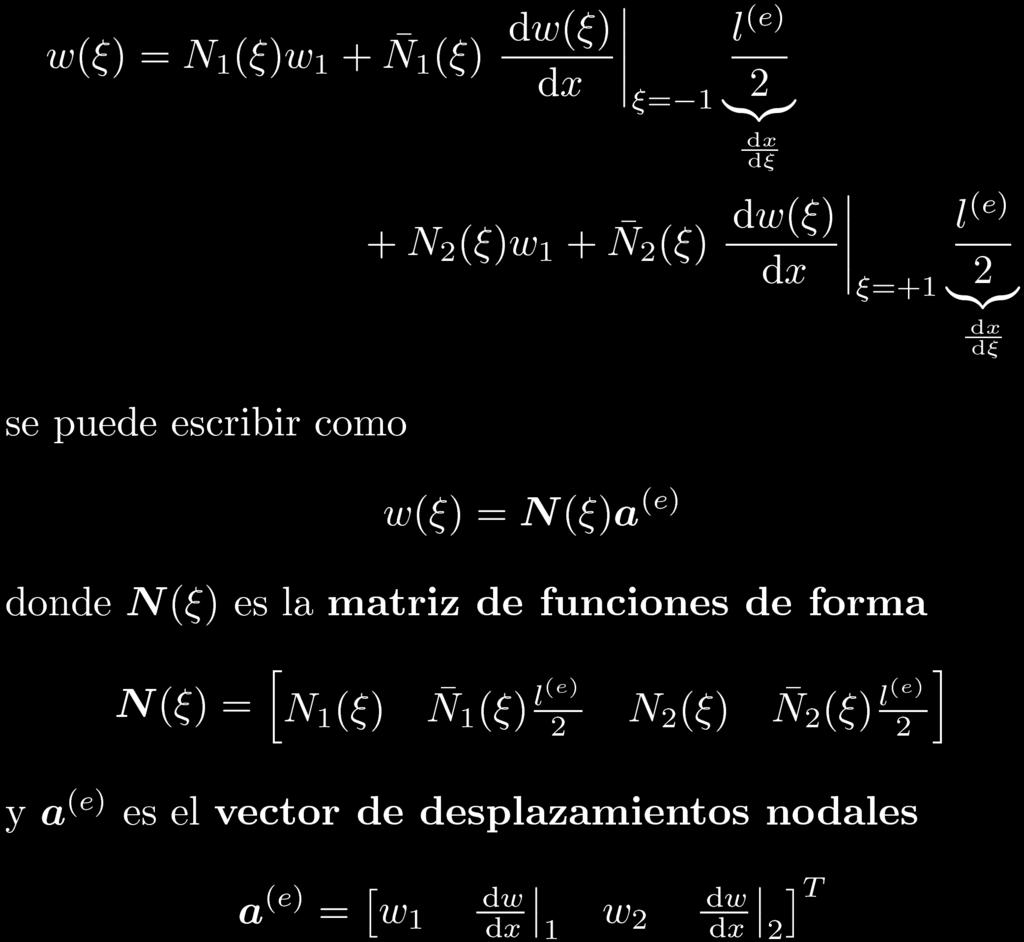
31 31

32 Las funciones de forma pertenecen a la familia de los llamados polinomios de Hermite 32

33 Curvatura en el punto de coordenada ξ 33

34 34

35 + + Esta matriz coincide con aquella obtenida por los métodos vistos en Estructuras III 35

36 + positivo hacia arriba

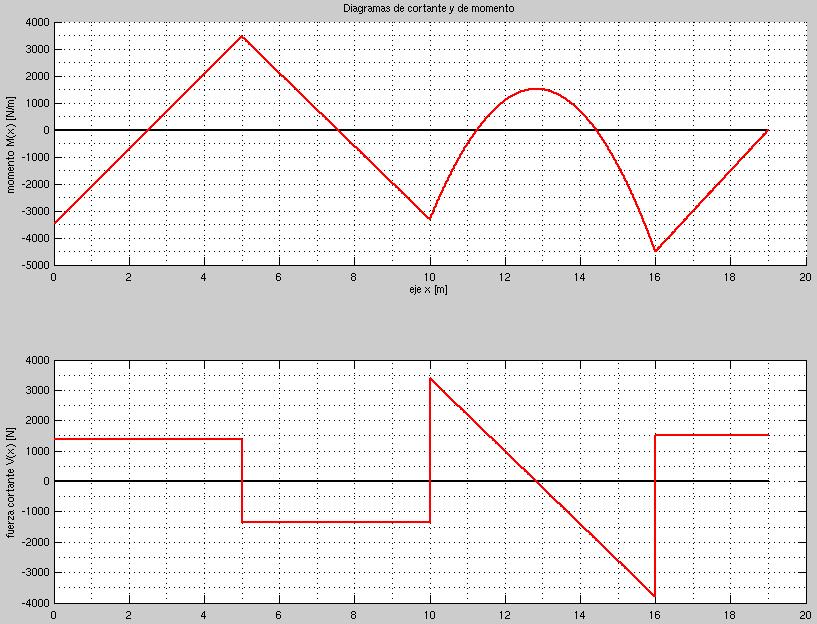
37 Cálculo de momento flector y fuerza cortante Observe que los momentos flectores varían de forma lineal y las fuerzas cortantes son constantes dentro del elemento 37

38 positivo hacia arriba + 38
39 EJEMPLO 39

40 Puntos óptimos para el cálculo de esfuerzos y deformaciones 40 flectores

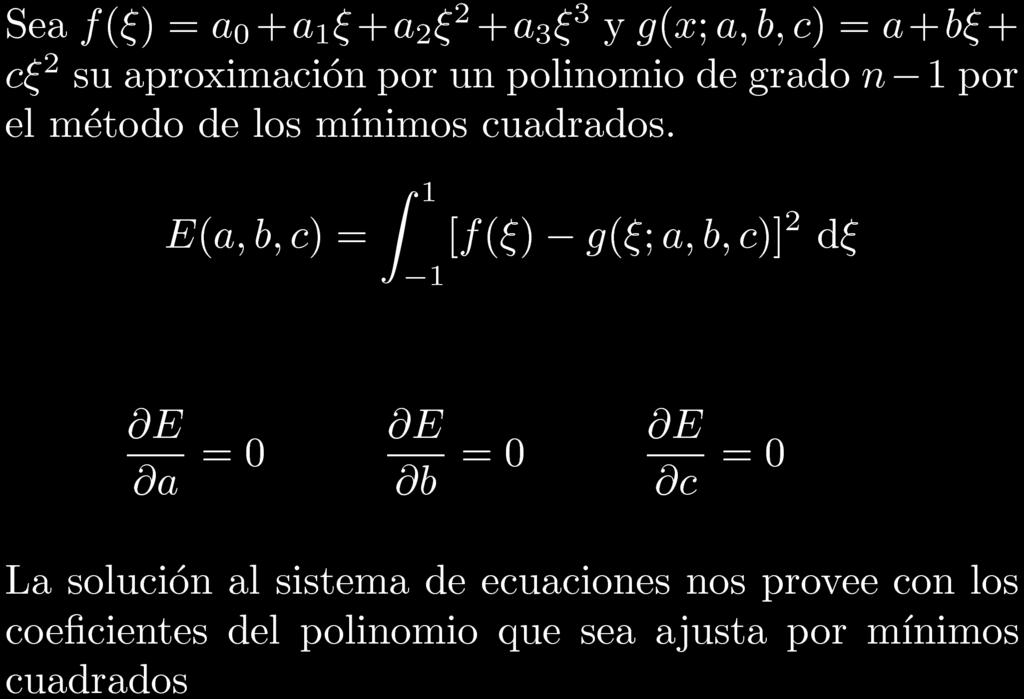
41 Repaso de mínimos cuadrados 41

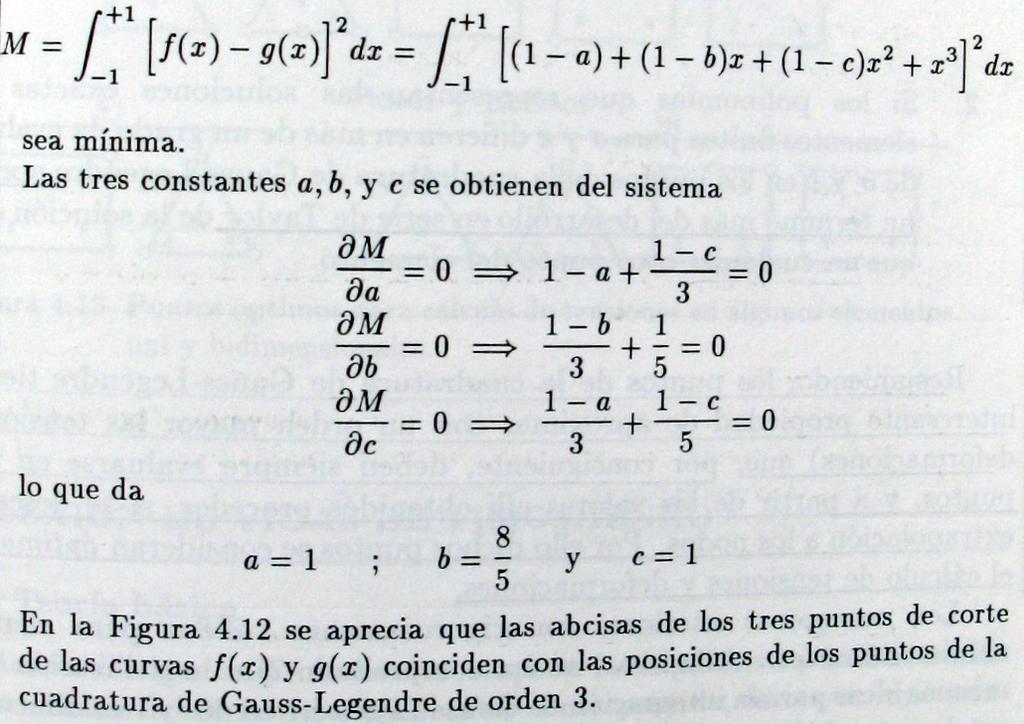
42 Puntos óptimos para el cálculo de esfuerzos y deformaciones 42
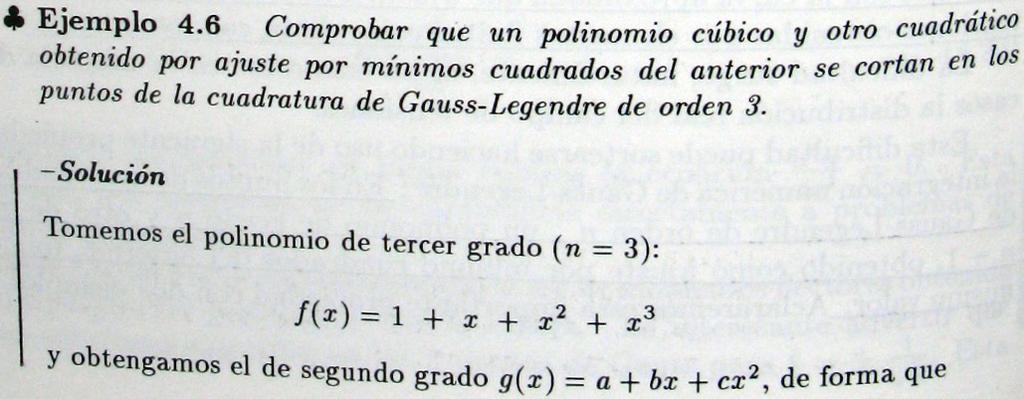
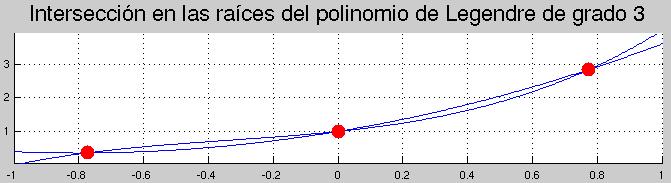
43 Propiedad de las raíces del polinomio de Legendre Suponga que tenemos un polinomio de grado n y otro de grado n-1 obtenido por medio de un ajuste por mínimos cuadrados del anterior. Ambos polinomios se intersectan en la ubicación de las raíces del polinomio de Legendre de orden n 43
44 44

45 Cuadraturas de Gauss Legendre 45
46 46
47 47

48 48
49 Este criterio para el cálculo de esfuerzos es también válido en más dimensiones 49

50 Puntos óptimos para el cálculo de esfuerzos y deformaciones flectores 50

51 La viga de Timoshenko
52 La viga de Timoshenko La viga de Timoshenko aproxima mejor la deformación real de la sección transversal de vigas de gran canto que la teoría de EulerBernoulli. A medida que la relación longitud/altura disminuye, las secciones transversales dejan de conservarse planas después de la deformación. 52
53 La viga de Timoshenko Los desplazamientos verticales (flechas) de todos los puntos de una sección transversal son pequeños e iguales a los del eje de la viga. El desplazamiento lateral es nulo (esto es el coeficiente de Poisson se asume cero en cuanto a la deformación lateral; G puede ser diferente de E/2). Las secciones transversales normales al eje de la viga antes de la deformación, permanecen planas pero no necesariamente ortogonales a dicho eje después de la deformación. 53
54 La hipótesis de Timoshenko supone tomar un giro medio de la sección, de manera que a efectos prácticos pueda seguir 54 considerándose plana.
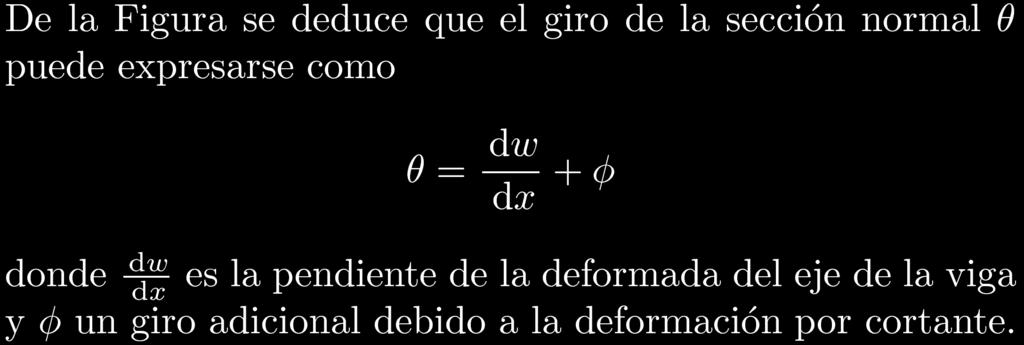
55 55

56 Campo de desplazamientos De acuerdo con las hipótesis anteriores el campo de desplazamientos de un punto cualquiera se puede escribir como: 56

57 Campo de deformaciones Por consiguiente la teoría de Timoshenko considera el57 efecto de la deformación angular

58 Campo de esfuerzos Al reemplazar en la ley de Hooke usando un coeficiente de Poisson igual cero en λ pero uno diferente de cero en G se obtiene: siendo los otros esfuerzos nulos.


59 Fuerza cortante y momento flector Un momento negativo produce tracción en la fibra superior - - -


60 Fuerza cortante y momento flector
61 - -

62

63 Principio de los trabajos virtuales + +

64 La energía virtual interna se puede expresar como: - Observe que solo se están utilizando las derivadas primeras de la flecha y el giro, lo que permite la utilización de elementos finitos de clase C0

65 Elementos finitos de dos nodos para la flexión de vigas de Timoshenko



66

67

68

69 +
70 +

71

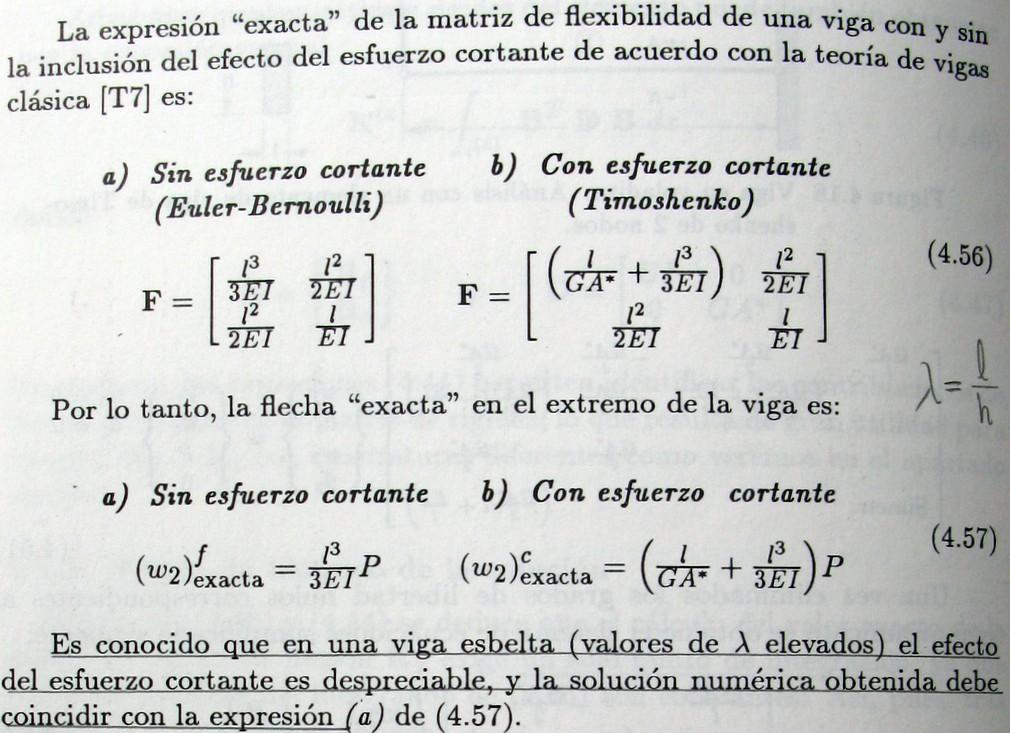
72 Integración exacta de las matrices de rigidez
73

74
75

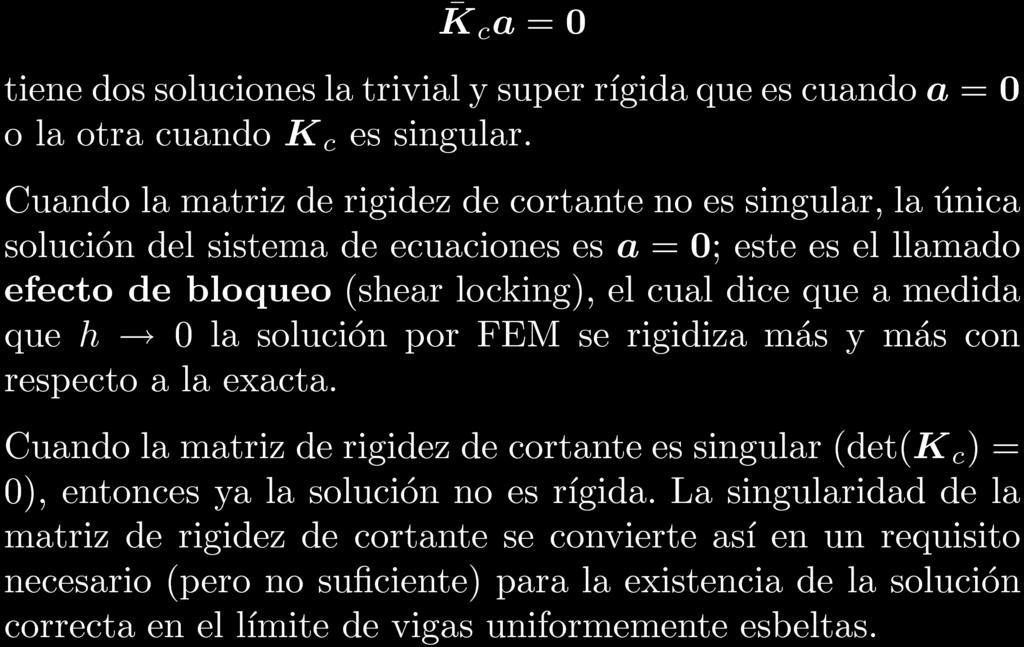
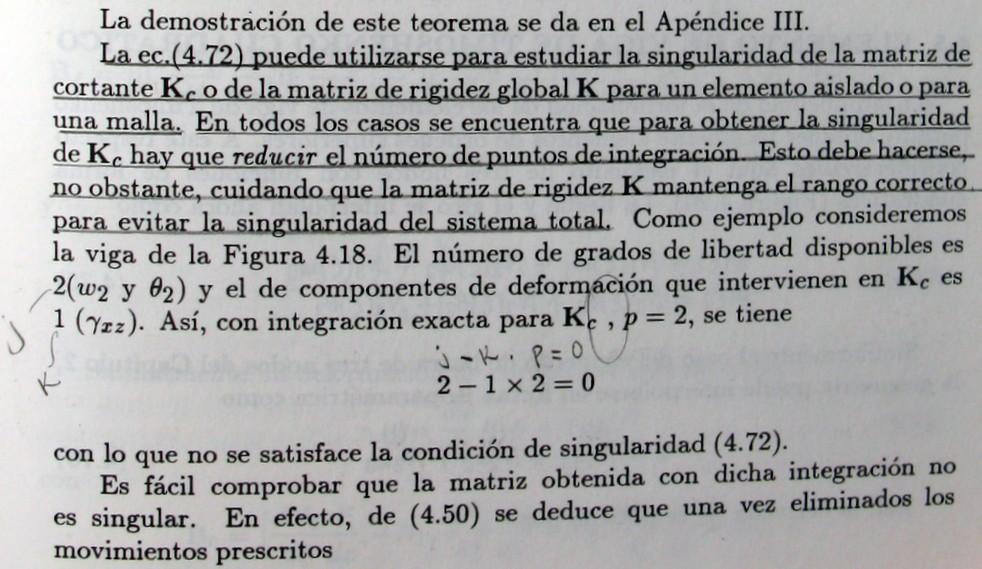
76 Integración con cuadraturas de GaussLegendre y singularidad de la matriz K
77 Singularidad de la matriz de rigidez Cuando K es singular se tiene que j-kp>0. Esta es una condición necesaria pero no suficiente. Si j-kp>0, muy probablemente K es singular Si j-kp 0, K es invertible El criterio j-kp>0 es aplicable a cualquier tipo de elemento finito y también es aplicable a la estructura en su totalidad. Es aplicable individualmente a la matriz K, a la matriz Kf o a la matriz Kc.



78 Puntos de integración de Gauss-Legendre Ejemplo Num #gld/nodo nodos En este caso en particular se debe usar la estrategia de integración d #gdl restringidos
79 29 nodos j = 29x2 3 = 55 gdl libres k = 3 componentes deformación (ex, ey, gxy) p = 6 (puntos de integración) j kp = 55 3x6 = 27 > 0 (Kdd es singular) 29 nodos j = 29x2 3 = 55 gdl libres k = 3 componentes deformación (ex, ey, gxy) p = 24 (puntos de integración) j kp = 55 3x24 = -17 > 0 (Kdd es invertible)

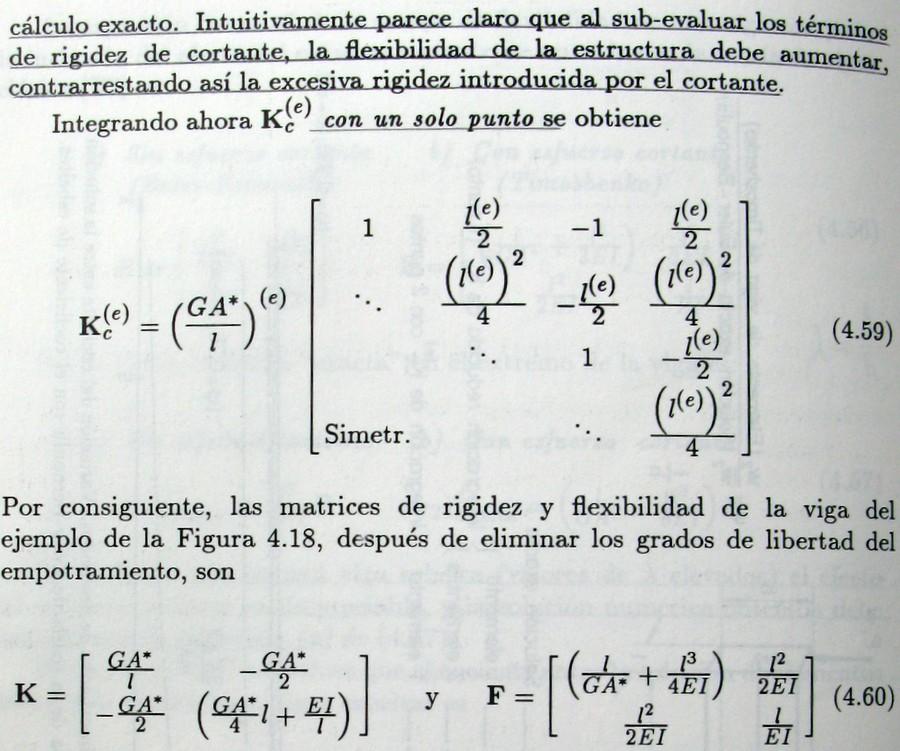
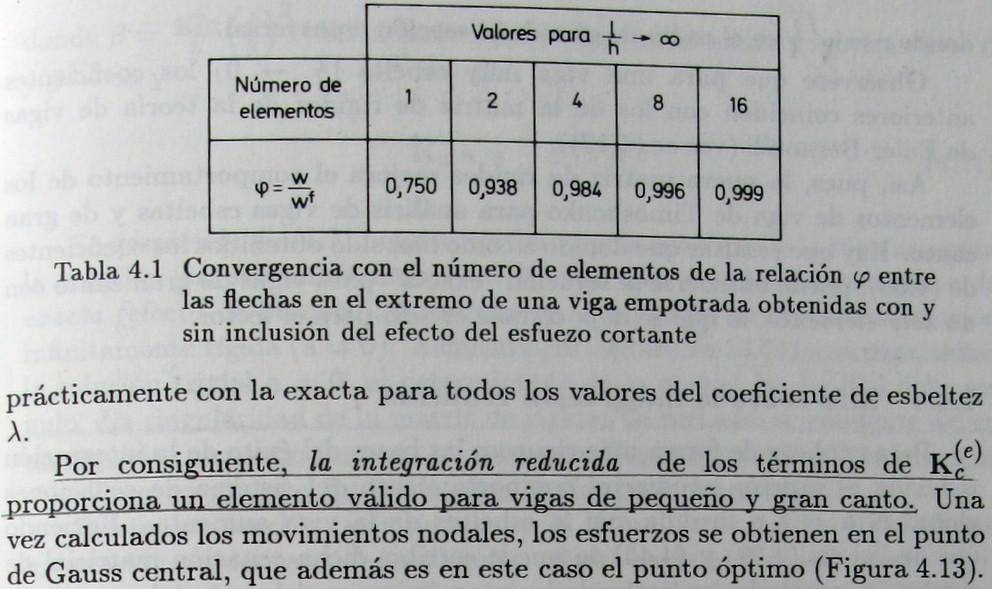
80 La técnica de integración reducida
 Integración reducida con un punto de GL Integración exacta (2p GL) NO")
81 Integración reducida de las matrices de rigidez de cortante Integración exacta con 1 punto de GL Integración reducida (1p GL) Integración reducida con un punto de GL Integración exacta (2p GL) NO USAR

82 EJEMPLO K exacta
83

84

85
86

87
88
89

90 Kf Kc

91 j=2 Viga modelada con un solo elemento finito de Timoshenko lineal Kf Kc K Integración reducida p=1 j-kp 2 1x1 = 1 2 1x1 = 1 2 2x1 = 0 Integración exacta p=2 j-kp 2 1x2 = 0 2 1x2 = 0 2 2x2 = -2


92 j=1 Viga modelada con un solo elemento finito de Timoshenko lineal Kf Kc K Integración reducida p=1 j-kp 1 1x1 = 0 1 1x1 = 0 1 2x1 = -1 Integración exacta p=2 j-kp 1 1x2 = x2 = x2 = -3
93 Evaluación de los momentos flectores y las fuerzas cortantes para el elemento de Timoshenko de dos nodos
94 Este criterio para el cálculo de esfuerzos es también válido en más dimensiones 94

95 Ejemplo EulerBernoulli vs Timoshenko
96 Integración reducida Kc integrada con GL de orden 1 L=6m, h=0.01m Shear locking Integración exacta Kc integrada con GL de orden 2 L=6m, h=0.01m
97 Integración reducida Kc integrada con GL de orden 1 L=6m, h=0.4m Integración exacta Kc integrada con GL de orden 2 L=6m, h=0.4m

98 Integración reducida Kc integrada con GL de orden 1 L=6m, h=2.0m Integración exacta Kc integrada con GL de orden 2 L=6m, h=2.0m
99 Elemento de viga de Timoshenko cuadrático
100 Funciones de forma e incógnitas nodales del elemento de Timoshenko de tres nodos
101 Cálculo de la curvatura
102 Cálculo de la deformación por cortante
103

104
105 Matrices de rigidez para el elemento de viga de Timoshenko de tres nodos obtenidas con una cuadratura de Gauss-Legendre de dos puntos Con Kc, tres puntos produce la matriz exacta, pero sufre esta de shear locking
106 Evaluación de los momentos flectores y las fuerzas cortantes para el elemento de Timoshenko de tres nodos

107 Este criterio para el cálculo de esfuerzos es también válido en más dimensiones 107
108 Alternativas para desarrollar elementos de viga de Timoshenko sin bloqueo por cortante Integración reducida Uso de interpolaciones para los desplazamientos verticales y para la rotación de diferentes grados Interpolación acoplada Asumir el campo de deformaciones angulares γxz
109 Uso de interpolaciones para los desplazamientos verticales y para la rotación de diferentes grados Ejemplos: grado w = 1/ grado t = 0 (const) grado w = 2/ grado t = 1 grado w = 3/ grado t = 2 En el libro de Oñate se discuten algunos problemas de este elemento con respecto a la convergencia de los esfuerzos cortantes. Toca programarlo para verificar que es lo que pasa.
110 Elemento con w cúbico y Ɵ cuadrático
111 Interpolación acoplada
112 Asumiendo el campo de deformaciones angulares γxz
08 Losas delgadas Teoría de Kirchhoff. Diego Andrés Alvarez Marín Profesor Asistente Universidad Nacional de Colombia Sede Manizales
 08 Losas delgadas Teoría de Kirchhoff Diego Andrés Alvarez Marín Profesor Asistente Universidad Nacional de Colombia Sede Manizales 1 Introducción Elementos laminares delgados Losas o placas (son elementos
08 Losas delgadas Teoría de Kirchhoff Diego Andrés Alvarez Marín Profesor Asistente Universidad Nacional de Colombia Sede Manizales 1 Introducción Elementos laminares delgados Losas o placas (son elementos
20 Dinámica + elementos finitos (caso lineal) Diego Andrés Alvarez Marín Profesor Asistente Universidad Nacional de Colombia Sede Manizales
 Diego Andrés Alvarez Marín Profesor Asistente Universidad Nacional de Colombia Sede Manizales") 20 Dinámica + elementos finitos (caso lineal) Diego Andrés Alvarez Marín Profesor Asistente Universidad Nacional de Colombia Sede Manizales 1 Nota Una deducción teóricamente rigurosa de las ecuaciones
20 Dinámica + elementos finitos (caso lineal) Diego Andrés Alvarez Marín Profesor Asistente Universidad Nacional de Colombia Sede Manizales 1 Nota Una deducción teóricamente rigurosa de las ecuaciones
Teoría General del Método de los Elementos Finitos
 Teoría General del Método de los Elementos Finitos MASTER'S DEGREE IN SAFETY, DURABILITY AND REPARATION OF CONCRETE STRUCTURES UNIVERSIDAD INTERNACIONAL MENÉNDEZ PELAYO This document can be used as reference
Teoría General del Método de los Elementos Finitos MASTER'S DEGREE IN SAFETY, DURABILITY AND REPARATION OF CONCRETE STRUCTURES UNIVERSIDAD INTERNACIONAL MENÉNDEZ PELAYO This document can be used as reference
O.C. Zienkiewicz, R.L. Taylor. El Método de los Elementos Finitos. Vols 1 y 2. CIMNE-Mc Graw Hill, 1994.
 Índice de la teoría 1. Presentación. Estas lecciones sólo pretenden ser una introducción que sirva para orientar sobre los conceptos, para un estudio más amplio se recomienda leer alguna publicación especializada,
Índice de la teoría 1. Presentación. Estas lecciones sólo pretenden ser una introducción que sirva para orientar sobre los conceptos, para un estudio más amplio se recomienda leer alguna publicación especializada,
CFGS CONSTRUCCION METALICA MODULO 246 DISEÑO DE CONSTRUCCIONES METALICAS
 CFGS CONSTRUCCION METALICA MODULO 246 DISEÑO DE CONSTRUCCIONES METALICAS U.T. 5.- FLEXION. 4.1.- Viga. Una viga es una barra recta sometida a fuerzas que actúan perpendicularmente a su eje longitudinal.
CFGS CONSTRUCCION METALICA MODULO 246 DISEÑO DE CONSTRUCCIONES METALICAS U.T. 5.- FLEXION. 4.1.- Viga. Una viga es una barra recta sometida a fuerzas que actúan perpendicularmente a su eje longitudinal.
1.1 Introducción Las ecuaciones diferenciales como modelos matemáticos
 1.1.. Las ecuaciones diferenciales como modelos matemáticos Los modelos matemáticos surgen en todos los campos de la ciencia. Aunque la relación entre modelos y fenómenos físicos en otras ciencias no es
1.1.. Las ecuaciones diferenciales como modelos matemáticos Los modelos matemáticos surgen en todos los campos de la ciencia. Aunque la relación entre modelos y fenómenos físicos en otras ciencias no es
TEMA 5: INTERPOLACION NUMERICA
 Lino Alvarez - Aurea Martinez METODOS NUMERICOS TEMA 5: INTERPOLACION NUMERICA 1 EL PROBLEMA GENERAL DE INTER- POLACION En ocasiones se plantea el problema de que se conoce una tabla de valores de una
Lino Alvarez - Aurea Martinez METODOS NUMERICOS TEMA 5: INTERPOLACION NUMERICA 1 EL PROBLEMA GENERAL DE INTER- POLACION En ocasiones se plantea el problema de que se conoce una tabla de valores de una
I.PROGRAMA DE ESTUDIOS. Unidad 1. Conceptos básicos de la teoría de las estructuras
 I.PROGRAMA DE ESTUDIOS Unidad 1 Conceptos básicos de la teoría de las estructuras 1.1.Equilibrio 1.2.Relación fuerza desplazamiento 1.3.Compatibilidad 1.4.Principio de superposición 1.5.Enfoque de solución
I.PROGRAMA DE ESTUDIOS Unidad 1 Conceptos básicos de la teoría de las estructuras 1.1.Equilibrio 1.2.Relación fuerza desplazamiento 1.3.Compatibilidad 1.4.Principio de superposición 1.5.Enfoque de solución
FEM para Mecánica 3D. Miguel Ángel Otaduy. Animación Avanzada 7 de Marzo de 2014
 FEM para Mecánica 3D Miguel Ángel Otaduy Animación Avanzada 7 de Marzo de 2014 Índice Repaso Hoy Funciones de forma Formulación fuerte formulación débil Matriz de rigidez Ec. de elasticidad en 3D Deformación
FEM para Mecánica 3D Miguel Ángel Otaduy Animación Avanzada 7 de Marzo de 2014 Índice Repaso Hoy Funciones de forma Formulación fuerte formulación débil Matriz de rigidez Ec. de elasticidad en 3D Deformación
III. Análisis de marcos
 Objetivo: 1. Efectuar el análisis de estructuras de marcos. 1. Introducción. Aquellas estructuras constituidas de vigas unidimensionales conectadas en sus extremos de forma pivotada o rígida son conocidas
Objetivo: 1. Efectuar el análisis de estructuras de marcos. 1. Introducción. Aquellas estructuras constituidas de vigas unidimensionales conectadas en sus extremos de forma pivotada o rígida son conocidas
Integración numérica
 Integración numérica Laboratori de Càlcul Numèric (LaCàN) Departament de Matemàtica Aplicada III Universitat Politècnica de Catalunya (Barcelona) http://www-lacan.upc.es Índice Motivación y objetivos Cuadratura
Integración numérica Laboratori de Càlcul Numèric (LaCàN) Departament de Matemàtica Aplicada III Universitat Politècnica de Catalunya (Barcelona) http://www-lacan.upc.es Índice Motivación y objetivos Cuadratura
ECUACIONES POLINÓMICAS CON UNA INCÓGNITA
 Unidad didáctica. Ecuaciones, inecuaciones y sistemas de ecuaciones e inecuaciones ECUACIONES POLINÓMICAS CON UNA INCÓGNITA Las ecuaciones polinómicas son aquellas equivalentes a una ecuación cuyo primer
Unidad didáctica. Ecuaciones, inecuaciones y sistemas de ecuaciones e inecuaciones ECUACIONES POLINÓMICAS CON UNA INCÓGNITA Las ecuaciones polinómicas son aquellas equivalentes a una ecuación cuyo primer
MECANICA I Carácter: Obligatoria
 UNIVERSIDAD CENTROCCIDENTAL LISANDRO ALVARADO DECANATO DE INGENIERIA CIVIL MECANICA I Carácter: Obligatoria PROGRAMA: Ingeniería Civil DEPARTAMENTO: Ingeniería Estructural CODIGO SEMESTRE DE CREDITO HT
UNIVERSIDAD CENTROCCIDENTAL LISANDRO ALVARADO DECANATO DE INGENIERIA CIVIL MECANICA I Carácter: Obligatoria PROGRAMA: Ingeniería Civil DEPARTAMENTO: Ingeniería Estructural CODIGO SEMESTRE DE CREDITO HT
EJEMPLOS DE APLICACIÓN DE LA INTEGRACIÓN APROXIMADA DE LAS ECUACIONES DIFERENCIALES DE EQUILIBRIO
 EJEMPLOS DE APLICACIÓN DE LA INTEGRACIÓN APROXIMADA DE LAS ECUACIONES DIFERENCIALES DE EQUILIBRIO 1. Objetivo El objetivo de esta aplicación es ilustrar cómo se pueden integrar las ecuaciones diferenciales
EJEMPLOS DE APLICACIÓN DE LA INTEGRACIÓN APROXIMADA DE LAS ECUACIONES DIFERENCIALES DE EQUILIBRIO 1. Objetivo El objetivo de esta aplicación es ilustrar cómo se pueden integrar las ecuaciones diferenciales
CI 32B ANALISIS DE ESTRUCTURAS ISOSTATICAS 10 U.D. REQUISITOS: FI 21A, MA 22A DH:(3,0-2,0-,5,0) Obligatorio de la Licenciatura en Ingeniería Civil
 Obligatorio de la Licenciatura en Ingeniería Civil") 1 CI 32B ANALISIS DE ESTRUCTURAS ISOSTATICAS 10 U.D. REQUISITOS: FI 21A, MA 22A DH:(3,0-2,0-,5,0) CARACTER: OBJETIVOS: CONTENIDOS Obligatorio de la Licenciatura en Ingeniería Civil Capacitar al alumno
1 CI 32B ANALISIS DE ESTRUCTURAS ISOSTATICAS 10 U.D. REQUISITOS: FI 21A, MA 22A DH:(3,0-2,0-,5,0) CARACTER: OBJETIVOS: CONTENIDOS Obligatorio de la Licenciatura en Ingeniería Civil Capacitar al alumno
La representación gráfica de una función cuadrática es una parábola.
 Función Cuadrática A la función polinómica de segundo grado +bx+c, siendo a, b, c números reales y, se la denomina función cuadrática. Los términos de la función reciben los siguientes nombres: La representación
Función Cuadrática A la función polinómica de segundo grado +bx+c, siendo a, b, c números reales y, se la denomina función cuadrática. Los términos de la función reciben los siguientes nombres: La representación
D1 Diseño utilizando elementos finitos. Diego Andrés Alvarez Marín Profesor Asistente Universidad Nacional de Colombia Sede Manizales
 D1 Diseño utilizando elementos finitos Diego Andrés Alvarez Marín Profesor Asistente Universidad Nacional de Colombia Sede Manizales 1 Tabla de contenido Observaciones generales Interpretación de gráficos
D1 Diseño utilizando elementos finitos Diego Andrés Alvarez Marín Profesor Asistente Universidad Nacional de Colombia Sede Manizales 1 Tabla de contenido Observaciones generales Interpretación de gráficos
Capítulo 3 El Método de los Elementos de Contorno y la Formulación Hipersingular.
 Capítulo 3 El Método de los Elementos de Contorno y la Formulación Hipersingular. 3.1. Introducción El Método de los Elementos de Contorno (MEC) se ha implantado firmemente en numerosos campos de la ingeniería
Capítulo 3 El Método de los Elementos de Contorno y la Formulación Hipersingular. 3.1. Introducción El Método de los Elementos de Contorno (MEC) se ha implantado firmemente en numerosos campos de la ingeniería
Integración numérica MAT 1105 F EJERCICIOS RESUELTOS. 1. Obtenga: a) Integrando por el método del trapecio. Se utilizan las siguientes formulas:
 Integrando por el método del trapecio. Se utilizan las siguientes formulas:") MAT 1105 F Integración numérica EJERCICIOS RESUELTOS 1 1. Obtenga: a) Integrando por el método del trapecio. Se utilizan las siguientes formulas: Donde: 4 2 Ecuación lineal Luego, Área del trapecio -1-1
MAT 1105 F Integración numérica EJERCICIOS RESUELTOS 1 1. Obtenga: a) Integrando por el método del trapecio. Se utilizan las siguientes formulas: Donde: 4 2 Ecuación lineal Luego, Área del trapecio -1-1
Unidad 2: Ecuaciones, inecuaciones y sistemas.
 Unidad 2: Ecuaciones, inecuaciones y sistemas 1 Unidad 2: Ecuaciones, inecuaciones y sistemas. 1.- Factorización de polinomios. M. C. D y m.c.m de polinomios. Un número a es raíz de un polinomio es 0.
Unidad 2: Ecuaciones, inecuaciones y sistemas 1 Unidad 2: Ecuaciones, inecuaciones y sistemas. 1.- Factorización de polinomios. M. C. D y m.c.m de polinomios. Un número a es raíz de un polinomio es 0.
4.1. Polinomios y teoría de ecuaciones
 CAPÍTULO 4 Polinomios y teoría de ecuaciones 4.1. Polinomios y teoría de ecuaciones Un polinomio real en x, o simplemente polinomio en x es una expresión algebraica de la forma a n x n + a n 1 x n 1 +
CAPÍTULO 4 Polinomios y teoría de ecuaciones 4.1. Polinomios y teoría de ecuaciones Un polinomio real en x, o simplemente polinomio en x es una expresión algebraica de la forma a n x n + a n 1 x n 1 +
Máster Universitario en Ingeniería de las Estructuras, Cimentaciones y Materiales UNIVERSIDAD POLITÉCNICA DE MADRID ANÁLISIS DINÁMICO DE ESTRUCTURAS
 ALBERTO RUIZ-CABELLO LÓPEZ EJERCICIO 4 1. Matriz de masas concentradas del sistema. La matriz de masas concentradas para un edificio a cortante es una matriz diagonal en la que cada componente no nula
ALBERTO RUIZ-CABELLO LÓPEZ EJERCICIO 4 1. Matriz de masas concentradas del sistema. La matriz de masas concentradas para un edificio a cortante es una matriz diagonal en la que cada componente no nula
Presentación del curso
 Análisis Numérico Presentación del curso CNM-425 Departamento de Matemáticas Facultad de Ciencias Exactas y Naturales Universidad de Antioquia Copyleft c 2010. Reproducción permitida bajo los términos
Análisis Numérico Presentación del curso CNM-425 Departamento de Matemáticas Facultad de Ciencias Exactas y Naturales Universidad de Antioquia Copyleft c 2010. Reproducción permitida bajo los términos
CURVATURA EN COLUMNAS
 UNIVERSIDAD DE ORIENTE NÚCLEO DE BOLIVAR UNIDAD DE ESTUDIOS BASICOS DEPARTAMENTO DE CIENCIAS AREA DE MATEMATICA CURVATURA EN COLUMNAS Prof. Cristian Castillo Sección 02 Presentado por: Olivera Ricardo
UNIVERSIDAD DE ORIENTE NÚCLEO DE BOLIVAR UNIDAD DE ESTUDIOS BASICOS DEPARTAMENTO DE CIENCIAS AREA DE MATEMATICA CURVATURA EN COLUMNAS Prof. Cristian Castillo Sección 02 Presentado por: Olivera Ricardo
Matemáticas I Grado de Administración y Dirección de Empresas Examen de Febrero Curso 2011/ ?
 Matemáticas I Grado de Administración y Dirección de Empresas Examen de Febrero Curso 011/1 1) (1 punto) Dado el subespacio vectorial,,,,,,,,,,, a) Obtener la dimensión, unas ecuaciones implícitas, unas
Matemáticas I Grado de Administración y Dirección de Empresas Examen de Febrero Curso 011/1 1) (1 punto) Dado el subespacio vectorial,,,,,,,,,,, a) Obtener la dimensión, unas ecuaciones implícitas, unas
DERIVADAS PARCIALES Y APLICACIONES
 CAPITULO IV CALCULO II 4.1 DEFINICIÓN DERIVADAS PARCIALES Y APLICACIONES En cálculo una derivada parcial de una función de diversas variables es su derivada respecto a una de esas variables con las otras
CAPITULO IV CALCULO II 4.1 DEFINICIÓN DERIVADAS PARCIALES Y APLICACIONES En cálculo una derivada parcial de una función de diversas variables es su derivada respecto a una de esas variables con las otras
» Ecuación del movimiento libre de un grado de libertad amortiguado: ED lineal de 2º orden homogénea cuya solución es de la forma:
 1.3. Oscilador armónico amortiguado 1» Ecuación del movimiento libre de un grado de libertad amortiguado: ED lineal de 2º orden homogénea cuya solución es de la forma: Si introducimos esta solución en
1.3. Oscilador armónico amortiguado 1» Ecuación del movimiento libre de un grado de libertad amortiguado: ED lineal de 2º orden homogénea cuya solución es de la forma: Si introducimos esta solución en
Pórticos espaciales. J. T. Celigüeta
 Pórticos espaciales J. T. Celigüeta Pórtico espacial. Definición Estructura reticular. Barras rectas de sección despreciable. Cualquier orientación en el espacio. Barras unidas rígidamente en ambos extremos.
Pórticos espaciales J. T. Celigüeta Pórtico espacial. Definición Estructura reticular. Barras rectas de sección despreciable. Cualquier orientación en el espacio. Barras unidas rígidamente en ambos extremos.
Preparación para Álgebra universitaria con trigonometría
 Preparación para Álgebra universitaria con trigonometría Este curso cubre los siguientes temas. Usted puede personalizar la gama y la secuencia de este curso para satisfacer sus necesidades curriculares.
Preparación para Álgebra universitaria con trigonometría Este curso cubre los siguientes temas. Usted puede personalizar la gama y la secuencia de este curso para satisfacer sus necesidades curriculares.
Anexo A: Modelación de vigas en PERFORM 3D. Figura A.1: Geometría de la viga VT-06-A.
 Anexo A: Modelación de vigas en PERFORM 3D Se muestra un modelamiento de una viga asimétrica VT-06-A con un f c= 21 Mpa (210 kg-f/cm 2 ), módulo de Poisson ν=0.15 y modulo elástico E= 2.13 E+08 Mpa (2.1737E+09
Anexo A: Modelación de vigas en PERFORM 3D Se muestra un modelamiento de una viga asimétrica VT-06-A con un f c= 21 Mpa (210 kg-f/cm 2 ), módulo de Poisson ν=0.15 y modulo elástico E= 2.13 E+08 Mpa (2.1737E+09
20 Dinámica + elementos finitos (caso lineal) Diego Andrés Alvarez Marín Profesor Asociado Universidad Nacional de Colombia Sede Manizales
 Diego Andrés Alvarez Marín Profesor Asociado Universidad Nacional de Colombia Sede Manizales") 20 Dinámica + elementos finitos (caso lineal) Diego Andrés Alvarez Marín Profesor Asociado Universidad Nacional de Colombia Sede Manizales 1 Ecuaciones de la elástodinámica Las ecuaciones diferenciales
20 Dinámica + elementos finitos (caso lineal) Diego Andrés Alvarez Marín Profesor Asociado Universidad Nacional de Colombia Sede Manizales 1 Ecuaciones de la elástodinámica Las ecuaciones diferenciales
TEMARIO PARA EL EXAMEN DE ACCESO A LA ESPECIALIDAD MATEMÁTICAS PARA E.S.O. Y BACHILLERATO DEL MÁSTER DE SECUNDARIA
 TEMARIO PARA EL EXAMEN DE ACCESO A LA ESPECIALIDAD MATEMÁTICAS PARA E.S.O. Y BACHILLERATO DEL MÁSTER DE SECUNDARIA 1. Números naturales, enteros y racionales. Principio de inducción. Divisibilidad y algoritmo
TEMARIO PARA EL EXAMEN DE ACCESO A LA ESPECIALIDAD MATEMÁTICAS PARA E.S.O. Y BACHILLERATO DEL MÁSTER DE SECUNDARIA 1. Números naturales, enteros y racionales. Principio de inducción. Divisibilidad y algoritmo
CÁLCULO DE PLACAS A TRAVÉS DE DISTINTAS METODOLOGÍAS
 UNIVERSIDAD CARLOS III DE MADRID ESCUELA POLITÉCNICA SUPERIOR Departamento de Mecánica de Medios Continuos y Teoría de Estructuras Ingeniería Técnica Industrial Mecánica Proyecto Fin de Carrera CÁLCULO
UNIVERSIDAD CARLOS III DE MADRID ESCUELA POLITÉCNICA SUPERIOR Departamento de Mecánica de Medios Continuos y Teoría de Estructuras Ingeniería Técnica Industrial Mecánica Proyecto Fin de Carrera CÁLCULO
METODOS DE INTEGRACION IV FRACCIONES PARCIALES
 METODOS DE INTEGRACION IV FRACCIONES PARCIALES Una función racional es una función de la forma En la que f(x) y g(x) son polinomios. Si el frado de f(x) es menor que el de g(x), F(x) se denomina fracción
METODOS DE INTEGRACION IV FRACCIONES PARCIALES Una función racional es una función de la forma En la que f(x) y g(x) son polinomios. Si el frado de f(x) es menor que el de g(x), F(x) se denomina fracción
INDICE Capitulo Primero. Número. Variable. Función Capitulo II. Límite y Continuidad de las Funciones Capitulo III. Derivada y Diferencial
 INDICE Capitulo Primero. Número. Variable. Función 1. Números reales. Representación de números reales por los puntos 1 del eje numérico 2. Valor absoluto de un número real 3 3. Magnitudes variables y
INDICE Capitulo Primero. Número. Variable. Función 1. Números reales. Representación de números reales por los puntos 1 del eje numérico 2. Valor absoluto de un número real 3 3. Magnitudes variables y
Facultad de Ciencias Experimentales Universidad de Almería PRÁCTICA 1
 PRÁCTICA 1 APLICACIONES INFORMÁTICAS I OBJETIVOS 1. Utilización de MATLAB para multiplicar matrices, encontrar la inversa de una matriz, obtener las raíces de una ecuación polinómica de orden tres o superior
PRÁCTICA 1 APLICACIONES INFORMÁTICAS I OBJETIVOS 1. Utilización de MATLAB para multiplicar matrices, encontrar la inversa de una matriz, obtener las raíces de una ecuación polinómica de orden tres o superior
Esta expresión polinómica puede expresarse como una expresión matricial de la forma; a 11 a 12 a 1n x 1 x 2 q(x 1, x 2,, x n ) = (x 1, x 2,, x n )
 = (x 1, x 2,, x n )") Tema 3 Formas cuadráticas. 3.1. Definición y expresión matricial Definición 3.1.1. Una forma cuadrática sobre R es una aplicación q : R n R que a cada vector x = (x 1, x 2,, x n ) R n le hace corresponder
Tema 3 Formas cuadráticas. 3.1. Definición y expresión matricial Definición 3.1.1. Una forma cuadrática sobre R es una aplicación q : R n R que a cada vector x = (x 1, x 2,, x n ) R n le hace corresponder
Figura Trabajo de las fuerzas eléctricas al desplazar en Δ la carga q.
 1.4. Trabajo en un campo eléctrico. Potencial Clases de Electromagnetismo. Ariel Becerra Al desplazar una carga de prueba q en un campo eléctrico, las fuerzas eléctricas realizan un trabajo. Este trabajo
1.4. Trabajo en un campo eléctrico. Potencial Clases de Electromagnetismo. Ariel Becerra Al desplazar una carga de prueba q en un campo eléctrico, las fuerzas eléctricas realizan un trabajo. Este trabajo
Estática de Vigas. 20 de mayo de 2006
 Estática de Vigas 0 de mayo de 006 Los elementos estructurales que vamos a estudiar en este capítulo estarán sometidos a fuerzas o distribuciones aplicadas lateral o transversalmente a sus ejes y el objetivo
Estática de Vigas 0 de mayo de 006 Los elementos estructurales que vamos a estudiar en este capítulo estarán sometidos a fuerzas o distribuciones aplicadas lateral o transversalmente a sus ejes y el objetivo
Colegio San Patricio A Incorporado a la Enseñanza Oficial Fundación Educativa San Patricio
 Función Cuadrática: Es toda función de la forma: f() = a ² + b + c con a, b, c números Reales Puede suceder que b ó c sean nulos, por ej: f() = ½ ² + 5 f() = 5 ² ¾ Pero a no puede ser = 0, de los contrario
Función Cuadrática: Es toda función de la forma: f() = a ² + b + c con a, b, c números Reales Puede suceder que b ó c sean nulos, por ej: f() = ½ ² + 5 f() = 5 ² ¾ Pero a no puede ser = 0, de los contrario
IX. Análisis dinámico de fuerzas
 Objetivos: IX. Análisis dinámico de fuerzas 1. Comprender la diferencia entre masa y peso. 2. Comprender como calcular el momento de masa de inercia de un objeto. 3. Recordar el teorema de ejes paralelos.
Objetivos: IX. Análisis dinámico de fuerzas 1. Comprender la diferencia entre masa y peso. 2. Comprender como calcular el momento de masa de inercia de un objeto. 3. Recordar el teorema de ejes paralelos.
2015, Año del Generalísimo José María Morelos y Pavón
 Nombre de la Asignatura: ROBOTICA Línea de Investigación o Trabajo: PROCESAMIENTO DE SEÑALES ELECTRICAS Y ELECTRONICAS Tiempo de dedicación del estudiante a las actividades de: DOC-TIS-TPS-CRÉDITOS 48
Nombre de la Asignatura: ROBOTICA Línea de Investigación o Trabajo: PROCESAMIENTO DE SEÑALES ELECTRICAS Y ELECTRONICAS Tiempo de dedicación del estudiante a las actividades de: DOC-TIS-TPS-CRÉDITOS 48
E.T.S.I. Caminos, Canales y Puertos I.C.C.P. Universidad de Granada
 E.T.S.I. aminos, anales y Puertos I...P. Universidad de Granada ONVO. SEPTIEMBRE TEORÍA DE ESTRUTURAS 16 SEPTIEMBRE 2013 TEORÍA Tiempo: 1 hora. APELLIDOS: FIRMA: NOMBRE: DNI: La Teoría representa 1/3 de
E.T.S.I. aminos, anales y Puertos I...P. Universidad de Granada ONVO. SEPTIEMBRE TEORÍA DE ESTRUTURAS 16 SEPTIEMBRE 2013 TEORÍA Tiempo: 1 hora. APELLIDOS: FIRMA: NOMBRE: DNI: La Teoría representa 1/3 de
Si se incrementa el número de elementos en los cuales se ha dividido la placa y simultáneamente se disminuye el tamaño de cada elemento se obtiene
 Capítulo 5 Fuerzas distribuidas. Centroides y centros de gravedad Introducción La acción de la Tierra sobre un cuerpo rígido debe representarse por un gran número de pequeñas fuerzas distribuidas sobre
Capítulo 5 Fuerzas distribuidas. Centroides y centros de gravedad Introducción La acción de la Tierra sobre un cuerpo rígido debe representarse por un gran número de pequeñas fuerzas distribuidas sobre
2. El conjunto de los números complejos
 Números complejos 1 Introducción El nacimiento de los números complejos se debió a la necesidad de dar solución a un problema: no todas las ecuaciones polinómicas poseen una solución real El ejemplo más
Números complejos 1 Introducción El nacimiento de los números complejos se debió a la necesidad de dar solución a un problema: no todas las ecuaciones polinómicas poseen una solución real El ejemplo más
Apéndice sobre ecuaciones diferenciales lineales
 Apéndice sobre ecuaciones diferenciales lineales Juan-Miguel Gracia 10 de febrero de 2008 Índice 2 Determinante wronskiano. Wronskiano de f 1 (t), f 2 (t),..., f n (t). Derivada de un determinante de funciones.
Apéndice sobre ecuaciones diferenciales lineales Juan-Miguel Gracia 10 de febrero de 2008 Índice 2 Determinante wronskiano. Wronskiano de f 1 (t), f 2 (t),..., f n (t). Derivada de un determinante de funciones.
Sílabo de Cálculo III
 Sílabo de Cálculo III I. Datos Generales Código Carácter UC0067 Obligatorio Créditos 5 Periodo Académico 2017 Prerrequisito Cálculo II Horas Teóricas 4 Prácticas 2 II. Sumilla de la Asignatura La asignatura
Sílabo de Cálculo III I. Datos Generales Código Carácter UC0067 Obligatorio Créditos 5 Periodo Académico 2017 Prerrequisito Cálculo II Horas Teóricas 4 Prácticas 2 II. Sumilla de la Asignatura La asignatura
Modelización por medio de sistemas
 SISTEMAS DE ECUACIONES DIFERENCIALES LINEALES. Modelización por medio de sistemas d y dy Ecuaciones autónomas de segundo orden: = f ( y, ) Una variable independiente. Una variable dependiente. La variable
SISTEMAS DE ECUACIONES DIFERENCIALES LINEALES. Modelización por medio de sistemas d y dy Ecuaciones autónomas de segundo orden: = f ( y, ) Una variable independiente. Una variable dependiente. La variable
Integración Numérica. Regla de Simpson.
 Integración Numérica. Regla de Simpson. MAT-251 Dr. CIMAT A.C. e-mail: alram@cimat.mx web: http://www.cimat.mx/~alram/met_num/ Dr. Salvador Botello CIMAT A.C. e-mail: botello@cimat.mx Lo que ya se vió
Integración Numérica. Regla de Simpson. MAT-251 Dr. CIMAT A.C. e-mail: alram@cimat.mx web: http://www.cimat.mx/~alram/met_num/ Dr. Salvador Botello CIMAT A.C. e-mail: botello@cimat.mx Lo que ya se vió
Álgebra y Trigonometría Clase 2 Ecuaciones, desigualdades y Funciones
 Álgebra y Trigonometría Clase 2 Ecuaciones, desigualdades y Funciones CNM-108 Departamento de Matemáticas Facultad de Ciencias Exactas y Naturales Universidad de Antioquia Copyleft c 2008. Reproducción
Álgebra y Trigonometría Clase 2 Ecuaciones, desigualdades y Funciones CNM-108 Departamento de Matemáticas Facultad de Ciencias Exactas y Naturales Universidad de Antioquia Copyleft c 2008. Reproducción
MATRICES. Se simboliza tal matriz por y se le llamará una matriz x o matriz de orden x (que se lee por ).
.") 1 MATRICES 1 Una matriz es una disposición rectangular de números (Reales); la forma general de una matriz con filas y columnas es Se simboliza tal matriz por y se le llamará una matriz x o matriz de orden
1 MATRICES 1 Una matriz es una disposición rectangular de números (Reales); la forma general de una matriz con filas y columnas es Se simboliza tal matriz por y se le llamará una matriz x o matriz de orden
Módulo 2. Deflexiones en vigas
 Módulo 2 Deflexiones en vigas Introducción Todos los cuerpos reales se deforman bajo la aplicación de una carga, elástica o plásticamente. Un cuerpo puede ser tan insensible a la deformación que el supuesto
Módulo 2 Deflexiones en vigas Introducción Todos los cuerpos reales se deforman bajo la aplicación de una carga, elástica o plásticamente. Un cuerpo puede ser tan insensible a la deformación que el supuesto
Introducción. Flujo Eléctrico.
 Introducción La descripción cualitativa del campo eléctrico mediante las líneas de fuerza, está relacionada con una ecuación matemática llamada Ley de Gauss, que relaciona el campo eléctrico sobre una
Introducción La descripción cualitativa del campo eléctrico mediante las líneas de fuerza, está relacionada con una ecuación matemática llamada Ley de Gauss, que relaciona el campo eléctrico sobre una
Funciones y sus gráficas
 y sus gráficas Marzo de 2006 Índice 1 polinómicas función constante función lineal función afín función cuadrática 2 racionales función de proporcionalidad inversa función racional 3 exponenciales 4 Ejemplos
y sus gráficas Marzo de 2006 Índice 1 polinómicas función constante función lineal función afín función cuadrática 2 racionales función de proporcionalidad inversa función racional 3 exponenciales 4 Ejemplos
Titulación: Asignatura: Código: Año: Periodo: Carácter: Nº de Créditos: Departamento: Área de Conocimiento: Curso: OBJETIVOS DOCENTES
 Titulación: Asignatura: Código: Año: Periodo: Carácter: Nº de Créditos: Departamento: Área de Conocimiento: Curso: OBJETIVOS DOCENTES Ingeniero en Telecomunicación Fundamentos Matemáticos de la Ingeniería
Titulación: Asignatura: Código: Año: Periodo: Carácter: Nº de Créditos: Departamento: Área de Conocimiento: Curso: OBJETIVOS DOCENTES Ingeniero en Telecomunicación Fundamentos Matemáticos de la Ingeniería
11.2. Anexo-B Anexo C... 57
 ÍNDEX 1. Introducción... 1 1.1. Antecedentes... 1 1.2. Objeto... 1 1.3. Alcance... 1 2. El Pandeo... 2 2.1 Carga critica de Euler... 4 3. Método de resolución... 7 4. Método de elementos finitos... 9 4.1.
ÍNDEX 1. Introducción... 1 1.1. Antecedentes... 1 1.2. Objeto... 1 1.3. Alcance... 1 2. El Pandeo... 2 2.1 Carga critica de Euler... 4 3. Método de resolución... 7 4. Método de elementos finitos... 9 4.1.
IN ST IT UT O POLIT ÉCN ICO N A CION A L SECRETARÍA ACADÉMICA DIRECCIÓN DE ESTUDIOS PROFESIONALES EN INGENIERÍA Y CIENCIAS FÍSICO MATEMÁTICAS
 CARRERA: Ingeniería Civil PROGRAMA SINTÉTICO ASIGNATURA: Resistencia de Materiales SEMESTRE: Quinto OBJETIVO GENERAL: El alumno calculará el comportamiento mecánico de los materiales, a partir de los esfuerzos
CARRERA: Ingeniería Civil PROGRAMA SINTÉTICO ASIGNATURA: Resistencia de Materiales SEMESTRE: Quinto OBJETIVO GENERAL: El alumno calculará el comportamiento mecánico de los materiales, a partir de los esfuerzos
MAT08-13-CALCULA - La calculadora ClassPad 300 como recurso didáctico en la enseñanza de las matemáticas
 ENUNCIADO Para completar el curso te proponemos la siguiente actividad: Selecciona cualquier contenido o contenidos del área de Matemáticas (o de otra especialidad si esta no es tu área de trabajo) de
ENUNCIADO Para completar el curso te proponemos la siguiente actividad: Selecciona cualquier contenido o contenidos del área de Matemáticas (o de otra especialidad si esta no es tu área de trabajo) de
Ejercicios Temas 3 y 4: Interpolación polinomial. Ajuste de curvas.
 Ejercicios Temas 3 y 4: Interpolación polinomial. Ajuste de curvas.. El número de personas afectadas por el virus contagioso que produce la gripe en una determinada población viene dado por la siguiente
Ejercicios Temas 3 y 4: Interpolación polinomial. Ajuste de curvas.. El número de personas afectadas por el virus contagioso que produce la gripe en una determinada población viene dado por la siguiente
EJERCICIOS RESUELTOS DE INTEGRAL DEFINIDA
 EJERCICIOS RESUELTOS DE INTEGRAL DEFINIDA. Calcular las siguientes integrales definidas: b) d e d c) + d d) d e) sen d f) + d d ( ) En primer lugar se ha calculado una primitiva de f() Barrow. y después
EJERCICIOS RESUELTOS DE INTEGRAL DEFINIDA. Calcular las siguientes integrales definidas: b) d e d c) + d d) d e) sen d f) + d d ( ) En primer lugar se ha calculado una primitiva de f() Barrow. y después
Laboratori de Càlcul Numèric (LaCàN) Departament de Matemàtica Aplicada III Universitat Politècnica de Catalunya (Barcelona) http://www-lacan.upc.
 Departament de Matemàtica Aplicada III Universitat Politècnica de Catalunya (Barcelona) http://www-lacan.upc.") Integración numérica Laboratori de Càlcul Numèric (LaCàN) Departament de Matemàtica Aplicada III Universitat Politècnica de Catalunya (Barcelona) http://www-lacan.upc.es Índice Motivación y objetivos Cuadratura
Integración numérica Laboratori de Càlcul Numèric (LaCàN) Departament de Matemàtica Aplicada III Universitat Politècnica de Catalunya (Barcelona) http://www-lacan.upc.es Índice Motivación y objetivos Cuadratura
SISTEMAS DE ECUACIONES LINEALES
 1 SISTEMAS DE ECUACIONES LINEALES Una ecuación es un enunciado o proposición que plantea la igualdad de dos expresiones, donde al menos una de ellas contiene cantidades desconocidas llamadas variables
1 SISTEMAS DE ECUACIONES LINEALES Una ecuación es un enunciado o proposición que plantea la igualdad de dos expresiones, donde al menos una de ellas contiene cantidades desconocidas llamadas variables
Inecuaciones con valor absoluto
 Inecuaciones con valor absoluto El valor absoluto de un número real a se denota por a y está definido por: Propiedades a a si a si a 0 a < 0 i a y b son números reales y n es un número entero, entonces:
Inecuaciones con valor absoluto El valor absoluto de un número real a se denota por a y está definido por: Propiedades a a si a si a 0 a < 0 i a y b son números reales y n es un número entero, entonces:
Ejercicio de ejemplo - Diagramas de solicitaciones. Se plantea el problema de hallar los diagramas de solicitaciones de la siguiente ménsula:
 Ejercicio de ejemplo - Diagramas de solicitaciones Se plantea el problema de hallar los diagramas de solicitaciones de la siguiente ménsula: 1- Reacciones: En primer lugar determinamos el valor de las
Ejercicio de ejemplo - Diagramas de solicitaciones Se plantea el problema de hallar los diagramas de solicitaciones de la siguiente ménsula: 1- Reacciones: En primer lugar determinamos el valor de las
CAPÍTULO IV: ANÁLISIS ESTRUCTURAL 4.1. Introducción al comportamiento de las estructuras Generalidades Concepto estructural Compo
 CAPITULO 0: ACCIONES EN LA EDIFICACIÓN 0.1. El contexto normativo Europeo. Programa de Eurocódigos. 0.2. Introducción al Eurocódigo 1. Acciones en estructuras. 0.3. Eurocódigo 1. Parte 1-1. Densidades
CAPITULO 0: ACCIONES EN LA EDIFICACIÓN 0.1. El contexto normativo Europeo. Programa de Eurocódigos. 0.2. Introducción al Eurocódigo 1. Acciones en estructuras. 0.3. Eurocódigo 1. Parte 1-1. Densidades
Descomposición en valores singulares de una matriz
 Descomposición en valores singulares de una matriz Estas notas están dedicadas a demostrar una extensión del teorema espectral conocida como descomposición en valores singulares (SVD en inglés) de gran
Descomposición en valores singulares de una matriz Estas notas están dedicadas a demostrar una extensión del teorema espectral conocida como descomposición en valores singulares (SVD en inglés) de gran
Una ecuación puede tener ninguna, una o varias soluciones. Por ejemplo: 5x 9 = 1 es una ecuación con una incógnita con una solución, x = 2
 Podemos definir a las ecuaciones como una igualdad entre expresiones algebraicas (encadenamiento de números y letras ligados por operaciones matemáticas diversas),en la que intervienen una o más letras,
Podemos definir a las ecuaciones como una igualdad entre expresiones algebraicas (encadenamiento de números y letras ligados por operaciones matemáticas diversas),en la que intervienen una o más letras,
Fig. 18. Flexión asimétrica o inclinada de una viga con sección transversal doblemente simétrica
 8. Flexión Asimétrica (Biaxial) de Vigas 8.1 Introducción En esta sección, el análisis de la flexión en elementos-vigas, estudiado en las secciones precedentes, es ampliado a casos más generales. Primero,
8. Flexión Asimétrica (Biaxial) de Vigas 8.1 Introducción En esta sección, el análisis de la flexión en elementos-vigas, estudiado en las secciones precedentes, es ampliado a casos más generales. Primero,
Solución de Sistemas de Ecuaciones Diferenciales Lineales
 Solución de Sistemas de Ecuaciones Diferenciales Lineales Departamento de Matemáticas, CCIR/ITESM 9 de febrero de Índice..Introducción.................................................Ejemplo.................................................3.Ejemplo................................................
Solución de Sistemas de Ecuaciones Diferenciales Lineales Departamento de Matemáticas, CCIR/ITESM 9 de febrero de Índice..Introducción.................................................Ejemplo.................................................3.Ejemplo................................................
Medición del módulo de elasticidad de una barra de acero
 Medición del módulo de elasticidad de una barra de acero Horacio Patera y Camilo Pérez hpatera@fra.utn.edu.ar Escuela de Educación Técnica Nº 3 Florencio Varela, Buenos Aires, Argentina En este trabajo
Medición del módulo de elasticidad de una barra de acero Horacio Patera y Camilo Pérez hpatera@fra.utn.edu.ar Escuela de Educación Técnica Nº 3 Florencio Varela, Buenos Aires, Argentina En este trabajo
Mecánica de Fluidos. Análisis Diferencial
 Mecánica de Fluidos Análisis Diferencial Análisis Diferencial: Descripción y caracterización del flujo en función de la descripción de una partícula genérica del flujo. 1. Introducción 2. Movimiento de
Mecánica de Fluidos Análisis Diferencial Análisis Diferencial: Descripción y caracterización del flujo en función de la descripción de una partícula genérica del flujo. 1. Introducción 2. Movimiento de
ESTRUCTURAS I. EJERCICIOS SOBRE DIAGRAMAS DE ESFUERZOS
 ETS de ARQUITECTURA de MADRID, UNIVERSIDAD POLITÉCNICA DE MADRID ESTRUCTURAS I. EJERCICIOS SOBRE DIAGRAMAS DE ESFUERZOS Planteamiento: JOSÉ L. FERNÁNDEZ CABO Desarrollo: MARÍA LUCÍA CERMEÑO, RUBÉN CONDE
ETS de ARQUITECTURA de MADRID, UNIVERSIDAD POLITÉCNICA DE MADRID ESTRUCTURAS I. EJERCICIOS SOBRE DIAGRAMAS DE ESFUERZOS Planteamiento: JOSÉ L. FERNÁNDEZ CABO Desarrollo: MARÍA LUCÍA CERMEÑO, RUBÉN CONDE
Capítulo 8. DEFORMACIONES EN LAS VIGAS
 Roberto Imaz Gutiérrez. Este capítulo se publica bajo Licencia Creative Commons BY NC SA 3.0 Capítulo 8. DEFORMACIONES EN LAS VIGAS 1. APLICACIÓN DEL CÁLCULO DE LAS DEFORMACIONES A LA RESOLUCIÓN DE ESTRUCTURAS
Roberto Imaz Gutiérrez. Este capítulo se publica bajo Licencia Creative Commons BY NC SA 3.0 Capítulo 8. DEFORMACIONES EN LAS VIGAS 1. APLICACIÓN DEL CÁLCULO DE LAS DEFORMACIONES A LA RESOLUCIÓN DE ESTRUCTURAS
Unidad II. Si una función f(x) tiene primitiva, tiene infinitas primitivas, diferenciándose todas ellas en unaconstante.
 tiene primitiva, tiene infinitas primitivas, diferenciándose todas ellas en unaconstante.") Unidad II Integral indefinida y métodos de integración. 2.1 Definición de integral indefinida. Integrar es el proceso recíproco del de derivar, es decir, dada una función f(x), busca aquellas funciones
Unidad II Integral indefinida y métodos de integración. 2.1 Definición de integral indefinida. Integrar es el proceso recíproco del de derivar, es decir, dada una función f(x), busca aquellas funciones
Teorema de la Mínima Energía Potencial Total
 ESTABIIDAD III acultad de Ingeniería Introducción: Teorema de la ínima Energía Potencial Total El teorema de la mínima energía potencial total es otra poderosa herramienta que permite resolver una serie
ESTABIIDAD III acultad de Ingeniería Introducción: Teorema de la ínima Energía Potencial Total El teorema de la mínima energía potencial total es otra poderosa herramienta que permite resolver una serie
Arcos planos. J. T. Celigüeta
 Arcos planos J. T. Celigüeta Arcos planos. Definición Directriz curva plana. Sección transversal despreciable. Curvatura pequeña: radio mucho mayor que el canto R>>h Varias condiciones de apoyo en los
Arcos planos J. T. Celigüeta Arcos planos. Definición Directriz curva plana. Sección transversal despreciable. Curvatura pequeña: radio mucho mayor que el canto R>>h Varias condiciones de apoyo en los
Resistencia de Materiales 1A. Profesor Herbert Yépez Castillo
 Resistencia de Materiales 1A Profesor Herbert Yépez Castillo 2014-2 2 Capítulo 5. Torsión 5.4 Ángulo 3 Un par es un momento que tiende a hacer girar respecto a su eje longitudinal. Su efecto es de interés
Resistencia de Materiales 1A Profesor Herbert Yépez Castillo 2014-2 2 Capítulo 5. Torsión 5.4 Ángulo 3 Un par es un momento que tiende a hacer girar respecto a su eje longitudinal. Su efecto es de interés
Presentación: Ing. Carlos Gerbaudo
 Colegio de Profesionales de la Ingeniería Civil de Entre Ríos DISEÑO Y CONSTRUCCIÓN DE PUENTES DE LUCES MEDIAS PARANÁ - 3 MARZO 2 016 Presentación: Ing. Carlos Gerbaudo UNIVERSIDAD NACIONAL DE CORDOBA
Colegio de Profesionales de la Ingeniería Civil de Entre Ríos DISEÑO Y CONSTRUCCIÓN DE PUENTES DE LUCES MEDIAS PARANÁ - 3 MARZO 2 016 Presentación: Ing. Carlos Gerbaudo UNIVERSIDAD NACIONAL DE CORDOBA
Profesorado de Nivel Medio y Superior en Biología Matemática - 1º Cuatrimestre Año 2013 FUNCIÓN CUADRÁTICA
 Matemática - º Cuatrimestre Año 0 FUNCIÓN CUADRÁTICA Hemos definido anteriormente la función lineal como una función f: R R de la forma f()a+b con a R y b R, que se representa en el plano mediante una
Matemática - º Cuatrimestre Año 0 FUNCIÓN CUADRÁTICA Hemos definido anteriormente la función lineal como una función f: R R de la forma f()a+b con a R y b R, que se representa en el plano mediante una
Ecuaciones de 1er Grado 2. Incógnitas. Ing. Gerardo Sarmiento Díaz de León
 Ecuaciones de 1er Grado 2 Incógnitas Ing. Gerardo Sarmiento Díaz de León 2009 Teoría sobre ecuaciones de primer grado con 2 icognitas solución por los 3 metodos CETis 63 Ameca, Jalisco Algebra Área matemáticas
Ecuaciones de 1er Grado 2 Incógnitas Ing. Gerardo Sarmiento Díaz de León 2009 Teoría sobre ecuaciones de primer grado con 2 icognitas solución por los 3 metodos CETis 63 Ameca, Jalisco Algebra Área matemáticas
Capítulo 4. FLEXIÓN PURA Y FLEXIÓN SIMPLE
 Roberto Imaz Gutiérrez. Este capítulo se publica bajo Licencia Creative Commons BY NC SA 3.0 Capítulo 4. FLEXIÓN PURA Y FLEXIÓN SIMPLE 4.1 GENERALIDADES Se dice que una pieza está sometida a flexión pura
Roberto Imaz Gutiérrez. Este capítulo se publica bajo Licencia Creative Commons BY NC SA 3.0 Capítulo 4. FLEXIÓN PURA Y FLEXIÓN SIMPLE 4.1 GENERALIDADES Se dice que una pieza está sometida a flexión pura
Campo de velocidades se puede representar mediante una función potencial φ, escalar
 Flujo Potencial Campo de velocidades se puede representar mediante una función potencial φ, escalar Condición necesaria flujo irrotacional, V=0. Hipótesis: Flujo irrotacional, incompresible y permanente
Flujo Potencial Campo de velocidades se puede representar mediante una función potencial φ, escalar Condición necesaria flujo irrotacional, V=0. Hipótesis: Flujo irrotacional, incompresible y permanente
UNIVERSIDAD NACIONAL DE RÍO CUARTO FACULTAD DE CIENCIAS EXACTAS, FÍSICO-QUÍMICAS Y NATURALES DEPARTAMENTO DE MATEMÁTICA
 UNIVERSIDAD NACIONAL DE RÍO CUARTO FACULTAD DE CIENCIAS EXACTAS, FÍSICO-QUÍMICAS Y NATURALES DEPARTAMENTO DE MATEMÁTICA CARRERA: Licenciatura en Química PLAN DE ESTUDIOS: 2010 ASIGNATURA: Matemática III
UNIVERSIDAD NACIONAL DE RÍO CUARTO FACULTAD DE CIENCIAS EXACTAS, FÍSICO-QUÍMICAS Y NATURALES DEPARTAMENTO DE MATEMÁTICA CARRERA: Licenciatura en Química PLAN DE ESTUDIOS: 2010 ASIGNATURA: Matemática III
Unidad V. 5.1 Recta tangente y recta normal a una curva en un punto. Curvas ortogonales.
 Unidad V Aplicaciones de la derivada 5.1 Recta tangente y recta normal a una curva en un punto. Curvas ortogonales. Una tangente a una curva es una recta que toca la curva en un solo punto y tiene la misma
Unidad V Aplicaciones de la derivada 5.1 Recta tangente y recta normal a una curva en un punto. Curvas ortogonales. Una tangente a una curva es una recta que toca la curva en un solo punto y tiene la misma
Leyes de esfuerzos y funciones de desplazamiento a lo largo de una barra
 Lees de esfuerzos funciones de desplazamiento a lo largo de una barra Apellidos, nombre Basset Salom, Luisa (lbasset@mes.upv.es) Departamento Centro Mecánica de Medios Continuos Teoría de Estructuras Escuela
Lees de esfuerzos funciones de desplazamiento a lo largo de una barra Apellidos, nombre Basset Salom, Luisa (lbasset@mes.upv.es) Departamento Centro Mecánica de Medios Continuos Teoría de Estructuras Escuela
PONTIFICIA UNIVERSIDAD CATÓLICA DEL PERÚ
 PONTIFICIA UNIVERSIDAD CATÓLICA DEL PERÚ FACULTAD DE CIENCIAS E INGENIERÍA Sección Ingeniería Mecánica CARACTERIZACIÓN DE UNA MATRIZ DE POLIÉSTER ISOFTÁLICA REFORZADA CON FIBRAS DE VIDRIO SIMÉTRICA COMO
PONTIFICIA UNIVERSIDAD CATÓLICA DEL PERÚ FACULTAD DE CIENCIAS E INGENIERÍA Sección Ingeniería Mecánica CARACTERIZACIÓN DE UNA MATRIZ DE POLIÉSTER ISOFTÁLICA REFORZADA CON FIBRAS DE VIDRIO SIMÉTRICA COMO
INDICE Prefacio 1 Preliminares del cálculo: funciones y limites teoremas escogidos con demostraciones formales
 INDICE Prefacio XIII 1 Preliminares del cálculo: funciones y limites 1 1.1. Qué es el calculo? 3 1.1.1. el limite: la paradoja de Zenón 5 1.1.2. la derivada: el problema de la tangente 6 1.1.3. la integral:
INDICE Prefacio XIII 1 Preliminares del cálculo: funciones y limites 1 1.1. Qué es el calculo? 3 1.1.1. el limite: la paradoja de Zenón 5 1.1.2. la derivada: el problema de la tangente 6 1.1.3. la integral:
Inecuaciones lineales y cuadráticas
 Inecuaciones lineales y cuadráticas 0.1. Inecuaciones lineales Una inecuación lineal tiene la forma ax + b < 0 ó ax + b > 0 ó ax + b 0 ó ax + b 0. El objetivo consiste en hallar el conjunto solución de
Inecuaciones lineales y cuadráticas 0.1. Inecuaciones lineales Una inecuación lineal tiene la forma ax + b < 0 ó ax + b > 0 ó ax + b 0 ó ax + b 0. El objetivo consiste en hallar el conjunto solución de
Algebra Lineal XXVI: La Regla de Cramer.
 Algebra Lineal XXVI: La Regla de Cramer José María Rico Martínez Departamento de Ingeniería Mecánica Facultad de Ingeniería Mecánica Eléctrica y Electrónica Universidad de Guanajuato email: jrico@salamancaugtomx
Algebra Lineal XXVI: La Regla de Cramer José María Rico Martínez Departamento de Ingeniería Mecánica Facultad de Ingeniería Mecánica Eléctrica y Electrónica Universidad de Guanajuato email: jrico@salamancaugtomx
Algebra lineal y conjuntos convexos
 Apéndice A Algebra lineal y conjuntos convexos El método simplex que se describirá en el Tema 2 es de naturaleza algebraica y consiste en calcular soluciones de sistemas de ecuaciones lineales y determinar
Apéndice A Algebra lineal y conjuntos convexos El método simplex que se describirá en el Tema 2 es de naturaleza algebraica y consiste en calcular soluciones de sistemas de ecuaciones lineales y determinar
ESCRITURA Y GRAFICACIÓN DE ECUACIONES LINEALES EN UNA SUPERFICIE PLANA
 ESCRITURA Y GRAFICACIÓN DE ECUACIONES LINEALES EN UNA SUPERFICIE PLANA La pendiente es un número que indica lo inclinado (o plano) de una recta, al igual que su dirección (hacia arriba o hacia abajo) de
ESCRITURA Y GRAFICACIÓN DE ECUACIONES LINEALES EN UNA SUPERFICIE PLANA La pendiente es un número que indica lo inclinado (o plano) de una recta, al igual que su dirección (hacia arriba o hacia abajo) de
CÁLCULO DIFERENCIAL E INTEGRAL I Programa para la Licenciatura en Física
 CÁLCULO DIFERENCIAL E INTEGRAL I Programa para la Licenciatura en Física BIBLIOGRAFÍA: M.Spivak, Cálculo Infinitesimal N. Piskunov, Cálculo Diferencial e Integral 4 1/2 hs de Teórico por semana (67 1/2
CÁLCULO DIFERENCIAL E INTEGRAL I Programa para la Licenciatura en Física BIBLIOGRAFÍA: M.Spivak, Cálculo Infinitesimal N. Piskunov, Cálculo Diferencial e Integral 4 1/2 hs de Teórico por semana (67 1/2
LA FORMA TRIGONOMETRICA DE LOS NUMEROS COMPLEJOS Y EL TEOREMA DE MOIVRE. Capítulo 7 Sec. 7.5 y 7.6
 LA FORMA TRIGONOMETRICA DE LOS NUMEROS COMPLEJOS Y EL TEOREMA DE MOIVRE Capítulo 7 Sec. 7.5 y 7.6 El Plano Complejo Se puede utilizar un plano de coordenadas para representar números complejos. Si cada
LA FORMA TRIGONOMETRICA DE LOS NUMEROS COMPLEJOS Y EL TEOREMA DE MOIVRE Capítulo 7 Sec. 7.5 y 7.6 El Plano Complejo Se puede utilizar un plano de coordenadas para representar números complejos. Si cada
PRÁCTICA No. 4 OBTENCIÓN DEL POLINOMIO CARACTERÍSTICO, EIGENVALORES Y EIGENVECTORES DE UNA MATRIZ
 PRÁCTICA No. 4 OBTENCIÓN DEL POLINOMIO CARACTERÍSTICO, EIGENVALORES Y OBJETIVO EDUCACIONAL EIGENVECTORES DE UNA MATRIZ El alumno aprenderá a obtener el polinomio característica, los eigenvalores (valores
PRÁCTICA No. 4 OBTENCIÓN DEL POLINOMIO CARACTERÍSTICO, EIGENVALORES Y OBJETIVO EDUCACIONAL EIGENVECTORES DE UNA MATRIZ El alumno aprenderá a obtener el polinomio característica, los eigenvalores (valores
U N I V E R S I D A D A L A S P E R U A N A S FACULTAD DE INGENIERÍAS Y ARQUITECTURA ESCUELA ACADÉMICO PROFESIONAL DE INGENIERÍA INDUSTRIAL
 U N I V E R S I D A D A L A S P E R U A N A S FACULTAD DE INGENIERÍAS Y ARQUITECTURA ESCUELA ACADÉMICO PROFESIONAL DE INGENIERÍA INDUSTRIAL RESISTENCIA DE MATERIALES SILABO I. DATOS GENERALES CODIGO CARRERA
U N I V E R S I D A D A L A S P E R U A N A S FACULTAD DE INGENIERÍAS Y ARQUITECTURA ESCUELA ACADÉMICO PROFESIONAL DE INGENIERÍA INDUSTRIAL RESISTENCIA DE MATERIALES SILABO I. DATOS GENERALES CODIGO CARRERA
Matrices, Determinantes y Sistemas Lineales.
 12 de octubre de 2014 Matrices Una matriz A m n es una colección de números ordenados en filas y columnas a 11 a 12 a 1n f 1 a 21 a 22 a 2n f 2....... a m1 a m2 a mn f m c 1 c 2 c n Decimos que la dimensión
12 de octubre de 2014 Matrices Una matriz A m n es una colección de números ordenados en filas y columnas a 11 a 12 a 1n f 1 a 21 a 22 a 2n f 2....... a m1 a m2 a mn f m c 1 c 2 c n Decimos que la dimensión
Derivadas Parciales (parte 2)
") 40 Derivadas Parciales (parte 2) Ejercicio: Si donde y. Determinar Solución: Consideraremos ahora la situación en la que, pero cada una de las variables e es función de dos variables y. En este caso tiene
40 Derivadas Parciales (parte 2) Ejercicio: Si donde y. Determinar Solución: Consideraremos ahora la situación en la que, pero cada una de las variables e es función de dos variables y. En este caso tiene
ν= 0.3; E=1.8e10; t= 0.05; q=-0.5;
 Analisis de placas y lamina 56 7.- COMPARACIÓN DE MÉTODOS MEDIANTE EJEMPLOS NUMÉRICOS DE CÁLCULO DE PLACAS A continuación se va ha hacer un análisis comparativo de los resultados obtenidos, para el cálculo
Analisis de placas y lamina 56 7.- COMPARACIÓN DE MÉTODOS MEDIANTE EJEMPLOS NUMÉRICOS DE CÁLCULO DE PLACAS A continuación se va ha hacer un análisis comparativo de los resultados obtenidos, para el cálculo
ECUACIÓN DE CAUCHY-EULER 2013
 ECUACIÓN DE CAUCHY-EULER 3 LA ECUACIÓN DE CAUCHY-EULER Se trata de una ecuación con coeficientes variables cua solución general siempre se puede epresar en términos de potencias, senos, cosenos, funciones
ECUACIÓN DE CAUCHY-EULER 3 LA ECUACIÓN DE CAUCHY-EULER Se trata de una ecuación con coeficientes variables cua solución general siempre se puede epresar en términos de potencias, senos, cosenos, funciones
Dos matrices son iguales cuando tienen la misma dimensión y los elementos que ocupan el mismo lugar en ambas son iguales
 Introducción Las matrices aparecen por primera vez hacia el año 1850, introducidas por J.J. Sylvester. El desarrollo inicial de la teoría se debe al matemático W.R. Hamilton en 1853. En 1858, A. Cayley
Introducción Las matrices aparecen por primera vez hacia el año 1850, introducidas por J.J. Sylvester. El desarrollo inicial de la teoría se debe al matemático W.R. Hamilton en 1853. En 1858, A. Cayley