Análisis de Componentes Principales (PCA) Jesús González y Eduardo Morales
|
|
|
- Alicia María Dolores Pereyra Lucero
- hace 6 años
- Vistas:
Transcripción
1 Análisis de Componentes Principales (PCA) Jesús González y Eduardo Morales
2 Introducción a PCA 2 PCA à herramienta estándar en análisis de datos Simple No paramétrico Extrae información relevante a partir de conjuntos de datos confusos Provee forma de reducir un conjunto de datos complejo a otro con dimensión menor n Revela estructuras simplificadas (algunas veces ocultas) Relación PCA SVD Aplicación en n Aprendizaje Computacional n Reducción de la Dimensionalidad
3 Ejemplo 3 camera A camera B camera C FIG. 1 A toy example. The position of a ball attached to an oscillating spring is recorded using three cameras A, B and C. The position of the ball tracked by each camera is depicted in each panel below.
4 PCA 4 Cómo representamos el conjunto de datos con una ecuación simple? Ademas, tenemos que trabajar con datos con ruido
5 Cambio de Bases 5 Meta en PCA Identificar las bases más significativas para reexpresar el conjunto de datos Esperamos que la nueva base n Filtre el ruido n Revele la estructura oculta
6 Base Naive 6 Representamos cada muestra de nuestro conjunto de datos Las coordenadas observadas en cada cámara n Obtenemos la posición de la bola por 10 minutos a 120 Hz. n 10 x 60 x 120 = 72,000 muestras (vectores) n X es un espacio vectoral m-dimensional generado por una base ortonormal 2 ~X = 6 4 x A y A x B y B x C y C ntributes a 2-dim
7 Base Naive 7 Si vemos solo la cámara A Cuál es una base ortonormal para (X A, Y A )? Una elección naive sería {(1,0), (0,1)} n Refleja el método con el que se obtuvieron los datos Hay otras opciones {(sqrt(2)/2) (sqrt(2)/2), (-sqrt(2)/2) (-sqrt(2)/2)} u otra rotación
8 Base Naive 8 Cómo representamos la base naive en álgebra lineal? Cada renglón es un vector base ortonormal b i con m componentes b b 2 B = = = I b m
9 Cambio de Base 9 Pregunta de PCA Hay otra base, una combinación lineal de las bases originales, que mejor exprese el conjunto de datos? Linearidad à simplifica el problema n Restringe el conjunto de bases potenciales
10 Cambio de Base 10 Sea X, el conjunto de datos original n Cada columna es una muestra independiente n En el ejemplo, X es una matrix de m x n n m = 6 n n = 72,000 Y, otra matriz de m x n, relacionada por una transformación lineal P n Y es una nueva representación de los datos originales PX = Y
11 Cambio de Base 11 Definamos las siguientes cantidades: p i son los renglones de P x i son las columnas de X (o muestras individuales) yi son las columnas de Y
12 Cambio de Base 12 La ecuación representa un cambio de base y puede tener muchas interpretaciones P es una matriz que transforma X en Y Geométricamente, P es una rotación y estiración, la cual transforma X en Y Los renglones de P {p 1,, p m } son un nuevo conjunto de vectores base para expresar las columnas de X
13 Cambio de Base Tenemos los producto punto de 6 4 PX y la forma de las columnas de Y 2 PX = Y = p 1.. p m 3 PX 7 5 x 1 x n 2 3 p 1 x 1 p 1 x n p m x 1 p m x n y i = p 1 x i.. p m x i
14 Preguntas Restantes 14 Los vectores renglón {p 1,.., p m } en esta transformación serán los componentes principales de X Cuál es la mejor manera de re-expresar X? Cuál es una buena elección de base P? Estas preguntas se responden al preguntarnos Qué carácterísticas nos gustaría que tuviera Y?
15 Varianza y la Meta 15 La pregunta más importante Qué expresa la media de los datos lo mejor posible?
16 Ruido y Rotación 16 No existe una escala absoluta para el ruido Sin embargo, se puede cuantificar relativo a la fuerza de la señal Medida común: signal-to-noise ratio (SNR), o un radio de varianzas σ 2 n SNR (>>1) indica una medición altamente precisa n SNR baja, indica datos con mucho ruido SNR = s2 signal s 2 noise.
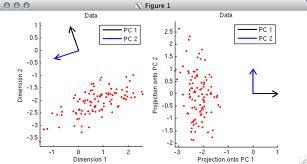
17 Ruido y Rotación 17 En el ejemplo Cualquier desviación de la línea recta del movimiento de la pelota es ruido Si consideramos razonablemente buenas mediciones Podemos asumir (cuantitativamente) n Las direcciones con las varianzas más altas en nuestro espacio de mediciones contiene la dinámica de interés La dirección con la varianza más alta no es X^ = (1, 0), ni Y^ = (0, 1); sino la dirección a lo largo del eje de la nube.
18 Ruido y Rotación 18 y σ 2 noise σ 2 signal x FIG. 2 Simulated data of (x,y) for camera A. The signal and noise variances s 2 signal and s 2 noise are graphically represented by the two lines subtending the cloud of data. Note that the largest direction of variance does not lie along the basis of the recording (x A,y A ) but rather along the best-fit line.
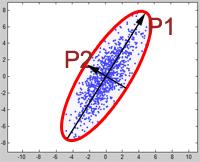
19 Ruido y Rotación 19 Maximizar la varianza y por asunción la SNR Corresponde a encontrar la rotación apropiada de la base naive Encontrar la dirección indicada por la línea σ 2 SIGNAL figura de la En 2 dimensiones, la dirección de mayor varianza corresponde a la línea de mejor ajuste para la nube de datos Rotamos la base naive para que sea paralela a la línea de mejor ajuste Revelará la dirección del movimiento del resorte y la pelota
20 Redundancia 20 Un factor más para confundirnos en el análisis es la redundancia En el ejemplo tenemos redundancia porque Múltiples sensores graban la información de la misma dinámica Era necesario grabar dos variables? n Medidas altamente correlacionadas n Si las cámaras A y B están muy cerca n Si una medida se toma en metros y la otra en pulgadas n En algunos casos una sola medida es suficiente n Podemos calcular r 1 a partir de r 2
21 Redundancia 21 r 2 r 2 r 2 r 1 low redundancy r 1 r 1 high redundancy FIG. 3 A spectrum of possible redundancies in data from the two separate measurements r 1 and r 2. The two measurements on the left are uncorrelated because one can not predict one from the other. Conversely, the two measurements on the right are highly correlated indicating highly redundant measurements.
22 Matriz de Covarianza 22 En 2 dimensiones es fácil identificar casos redundantes Encontrar la pendiente con mejor ajuste y verificando la calidad del ajuste Cómo cuantificamos y generalizamos estas nociones a dimensiones más altas? Conjuntos de medidas con media cero n A = {a 1, a 2,, a n }, B = {b 1, b 2,, b n } n El sub-script denota el número de muestra
23 Matriz de Covarianza 23 Varianzas individuales de A y B s 2 A = 1 n  i a 2 i, s 2 B = 1 n  i b 2 i Covarianza entre A y B covariance o f A and B s 2 AB = 1 n  i a i b i La covarianza entre 2 variables mide el grado de la relación lineal entre ellas
24 Matriz de Covarianza 24 Valor positivo grande Datos positivamente correlacionados Valor negativo grande Datos negativamente correlacionados La magnitud absoluta de la covarianza mide el grado de redundancia Cero sí y solo si A y B no están correlacionados s 2 AB = s2 A if A = B.
25 Matriz de Covarianza 25 Podemos convertir A y B a sus correspondientes vectores renglón a = [a 1 a 2... a n ] b = [b 1 b 2... b n ] Covarianza como producto de matrices s 2 ab 1 n abt
26 Matriz de Covarianza 26 Generalizando de 2 vectores a un número arbitrario Renombramos a y b a x 1 y x 2 y vectores renglón adicionales x 3, x m Definimos una nueva matriz X de m x n. X = x 1.. x m 3 7 5
27 27 Matriz de Covarianza Interpretación de X 6 4 Cada renglón de X corresponde a todas las medidas de un tipo en particular Cada columna de X corresponde a un conjunto de medidas de un ejemplo en particular Ahora definimos la matriz de covarianza C X. 7 5 C X 1 n XXT. n El elemento ij de C X es el producto punto entre el vector del tipo de medida i con el vector del tipo de medida j
28 Matriz de Covarianza 28 Propiedades de C X C X es una matriz de m x m cuadrada simétrica Los términos de la diagonal de C X son la varianza de tipos particulares de medidas Los valores fuera de la diagonal de C X son la covarianza entre tipos de medidas
29 Matriz de Covarianza 29 Los valores de covarianza reflejan el ruido y redundancia en nuestras medidas En la diagonal: valores grandes corresponden a estructura interesante Fuera de la diagonal: valores con magnitudes altas corresponden a alta redundancia
30 Matriz de Covarianza 30 Suponiendo que tenemos la opción de manipular C X Definir la matriz de covarianza manipulada C Y Qué carácterísticas queremos optimizar en C Y?
31 Matriz de Covarianza Diagonalizada 31 Queremos Minimizar redundancia medida por la magnitud de la covarianza Maximizar la señal, medida por la varianza Cómo debería verse la matriz de covarianza optimizada C Y? n Los términos en C Y fuera de la diagonal deben ser cero n C Y debe ser una matriz diagonal, ó Y está descorrelacionada n Cada dimensión sucesiva en Y debe estar ordenada (ranked) de acuerdo a la varianza
32 Matriz de Covarianza Diagonalizada 32 Hay varios métodos para diagonalizar C Y PCA utiliza el método más sencillo Asume que todos los vectores base {p 1,, p m } son ortonormales n P es una matriz ortonormal Veamos como trabaja PCA P es la matriz generalizada de rotación para alinear una base con los ejes de máxima varianza El conjunto ordenado que resulta de p s son los componentes principales.
33 Resumen de Suposiciones 33 Linearidad Alta varianza, tiene estructura importante Los componentes principales son ortogonales
34 PCA 34
35 PCA 35
36 PCA 36
Repaso de conceptos de álgebra lineal
 MÉTODOS AVANZADOS EN APRENDIZAJE ARTIFICIAL: TEORÍA Y APLICACIONES A PROBLEMAS DE PREDICCIÓN Manuel Sánchez-Montañés Luis Lago Ana González Escuela Politécnica Superior Universidad Autónoma de Madrid Repaso
MÉTODOS AVANZADOS EN APRENDIZAJE ARTIFICIAL: TEORÍA Y APLICACIONES A PROBLEMAS DE PREDICCIÓN Manuel Sánchez-Montañés Luis Lago Ana González Escuela Politécnica Superior Universidad Autónoma de Madrid Repaso
Álgebra y Geometría Analítica I - LF 2016 Práctica 1: Algunos elementos de la Geometría Analítica
 Álgebra y Geometría Analítica I - LF 2016 Práctica 1: Algunos elementos de la Geometría Analítica 1. a) Marcar en un eje los puntos a(1);b( 2) y c(4). b) Hallar los puntos simétricos respecto al origen
Álgebra y Geometría Analítica I - LF 2016 Práctica 1: Algunos elementos de la Geometría Analítica 1. a) Marcar en un eje los puntos a(1);b( 2) y c(4). b) Hallar los puntos simétricos respecto al origen
CORRELACIÓN Y REGRESIÓN. Raúl David Katz
 CORRELACIÓN Y REGRESIÓN Raúl David Katz 1 Correlación y regresión Introducción Hasta ahora hemos visto el modo de representar la distribución de frecuencias de los datos correspondientes a una variable
CORRELACIÓN Y REGRESIÓN Raúl David Katz 1 Correlación y regresión Introducción Hasta ahora hemos visto el modo de representar la distribución de frecuencias de los datos correspondientes a una variable
UNIDAD: ÁLGEBRA Y FUNCIONES ECUACIÓN DE LA RECTA
 C u r s o : Matemática Material N 8 GUÍA TEÓRICO PRÁCTICA Nº 5 UNIDAD: ÁLGEBRA Y FUNCIONES ECUACIÓN DE LA RECTA SISTEMA CARTESIANO ORTOGONAL Para determinar la posición de los puntos de un plano usando
C u r s o : Matemática Material N 8 GUÍA TEÓRICO PRÁCTICA Nº 5 UNIDAD: ÁLGEBRA Y FUNCIONES ECUACIÓN DE LA RECTA SISTEMA CARTESIANO ORTOGONAL Para determinar la posición de los puntos de un plano usando
El análisis cartesiano (René Descartes ) descubrió que las ecuaciones pueden tener una representación gráfica.
 descubrió que las ecuaciones pueden tener una representación gráfica.") Capítulo 4. Estudio de la línea recta El análisis cartesiano (René Descartes 1596-1650) descubrió que las ecuaciones pueden tener una representación gráfica. Para lograr esa representación gráfica es necesario
Capítulo 4. Estudio de la línea recta El análisis cartesiano (René Descartes 1596-1650) descubrió que las ecuaciones pueden tener una representación gráfica. Para lograr esa representación gráfica es necesario
Tema 5. Muestreo y distribuciones muestrales
 1 Tema 5. Muestreo y distribuciones muestrales En este tema: Muestreo y muestras aleatorias simples. Distribución de la media muestral: Esperanza y varianza. Distribución exacta en el caso normal. Distribución
1 Tema 5. Muestreo y distribuciones muestrales En este tema: Muestreo y muestras aleatorias simples. Distribución de la media muestral: Esperanza y varianza. Distribución exacta en el caso normal. Distribución
ANEXO 1. CONCEPTOS BÁSICOS. Este anexo contiene información que complementa el entendimiento de la tesis presentada.
 ANEXO 1. CONCEPTOS BÁSICOS Este anexo contiene información que complementa el entendimiento de la tesis presentada. Aquí se exponen técnicas de cálculo que son utilizados en los procedimientos de los modelos
ANEXO 1. CONCEPTOS BÁSICOS Este anexo contiene información que complementa el entendimiento de la tesis presentada. Aquí se exponen técnicas de cálculo que son utilizados en los procedimientos de los modelos
Teoría Tema 6 Ecuaciones de la recta
 página 1/14 Teoría Tema 6 Ecuaciones de la recta Índice de contenido Base canónica en dos dimensiones como sistema referencial...2 Ecuación vectorial de la recta...4 Ecuación paramétrica de la recta...6
página 1/14 Teoría Tema 6 Ecuaciones de la recta Índice de contenido Base canónica en dos dimensiones como sistema referencial...2 Ecuación vectorial de la recta...4 Ecuación paramétrica de la recta...6
TEMA 8. GEOMETRÍA ANALÍTICA.
 TEMA 8. GEOMETRÍA ANALÍTICA. 8..- El plano. Definimos el plano euclideo como el conjunto de puntos ( x, y) R. Así, cada punto del plano posee dos coordenadas. Para representar puntos del plano utilizaremos
TEMA 8. GEOMETRÍA ANALÍTICA. 8..- El plano. Definimos el plano euclideo como el conjunto de puntos ( x, y) R. Así, cada punto del plano posee dos coordenadas. Para representar puntos del plano utilizaremos
y cualquier par (x, y) puede escalarse, multiplicarse por un número real s, para obtener otro vector (sx, sy).
 puede escalarse, multiplicarse por un número real s, para obtener otro vector (sx, sy).") UNIDAD II: VECTORES EN DOS Y TRES DIMENSIONES Un espacio vectorial (o espacio lineal) es el objeto básico de estudio en la rama de la matemática llamada álgebra lineal. A los elementos de los espacios
UNIDAD II: VECTORES EN DOS Y TRES DIMENSIONES Un espacio vectorial (o espacio lineal) es el objeto básico de estudio en la rama de la matemática llamada álgebra lineal. A los elementos de los espacios
Jesús Eduardo Pulido Guatire, marzo Diagrama de Dispersión y Correlación Lineal Simple
 Jesús Eduardo Pulido Guatire, marzo 0 Diagrama de Dispersión y Correlación Lineal Simple Hasta el momento el trabajo lo hemos centrado en resumir las características de una variable mediante la organización
Jesús Eduardo Pulido Guatire, marzo 0 Diagrama de Dispersión y Correlación Lineal Simple Hasta el momento el trabajo lo hemos centrado en resumir las características de una variable mediante la organización
Vectores y Matrices. Tema 3: Repaso de Álgebra Lineal Parte I. Contenidos
 Tema 3: Repaso de Álgebra Lineal Parte I Virginia Mazzone Contenidos Vectores y Matrices Bases y Ortonormailizaciòn Norma de Vectores Ecuaciones Lineales Algenraicas Ejercicios Vectores y Matrices Los
Tema 3: Repaso de Álgebra Lineal Parte I Virginia Mazzone Contenidos Vectores y Matrices Bases y Ortonormailizaciòn Norma de Vectores Ecuaciones Lineales Algenraicas Ejercicios Vectores y Matrices Los
Tema 7: Geometría Analítica. Rectas.
 Tema 7: Geometría Analítica. Rectas. En este tema nos centraremos en estudiar la geometría en el plano, así como los elementos que en este aparecen como son los puntos, segmentos, vectores y rectas. Estudiaremos
Tema 7: Geometría Analítica. Rectas. En este tema nos centraremos en estudiar la geometría en el plano, así como los elementos que en este aparecen como son los puntos, segmentos, vectores y rectas. Estudiaremos
UNIDAD: ÁLGEBRA Y FUNCIONES ECUACIÓN DE LA RECTA
 C u r s o : Matemática Material N 18 UNIDAD: ÁLGEBRA Y FUNCIONES ECUACIÓN DE LA RECTA GUÍA TEÓRICO PRÁCTICA Nº 15 SISTEMA CARTESIANO ORTOGONAL Para determinar la posición de los puntos de un plano usando
C u r s o : Matemática Material N 18 UNIDAD: ÁLGEBRA Y FUNCIONES ECUACIÓN DE LA RECTA GUÍA TEÓRICO PRÁCTICA Nº 15 SISTEMA CARTESIANO ORTOGONAL Para determinar la posición de los puntos de un plano usando
NORMALES. Computación Gráfica
 NORMALES Computación Gráfica Normales Importantes en CG para determinar cómo debe colorearse un punto sobre una superficie. Nos importa saber cómo se transforman las normales cuando se transforman las
NORMALES Computación Gráfica Normales Importantes en CG para determinar cómo debe colorearse un punto sobre una superficie. Nos importa saber cómo se transforman las normales cuando se transforman las
Algebra lineal y conjuntos convexos
 Apéndice A Algebra lineal y conjuntos convexos El método simplex que se describirá en el Tema 2 es de naturaleza algebraica y consiste en calcular soluciones de sistemas de ecuaciones lineales y determinar
Apéndice A Algebra lineal y conjuntos convexos El método simplex que se describirá en el Tema 2 es de naturaleza algebraica y consiste en calcular soluciones de sistemas de ecuaciones lineales y determinar
es el lugar geométrico de los puntos p tales que p 0 p n o p 0 p o. p x ; y ; z perteneciente a y un vector no
 El Plano y la Recta en el Espacio Matemática 4º Año Cód. 145-15 P r o f. M a r í a d e l L u j á n M a r t í n e z P r o f. J u a n C a r l o s B u e P r o f. M i r t a R o s i t o P r o f. V e r ó n i
El Plano y la Recta en el Espacio Matemática 4º Año Cód. 145-15 P r o f. M a r í a d e l L u j á n M a r t í n e z P r o f. J u a n C a r l o s B u e P r o f. M i r t a R o s i t o P r o f. V e r ó n i
Distribuciones de probabilidad bidimensionales o conjuntas
 Distribuciones de probabilidad bidimensionales o conjuntas Si disponemos de dos variables aleatorias podemos definir distribuciones bidimensionales de forma semejante al caso unidimensional. Para el caso
Distribuciones de probabilidad bidimensionales o conjuntas Si disponemos de dos variables aleatorias podemos definir distribuciones bidimensionales de forma semejante al caso unidimensional. Para el caso
Espacios vectoriales reales.
 Tema 3 Espacios vectoriales reales. 3.1 Espacios vectoriales. Definición 3.1 Un espacio vectorial real V es un conjunto de elementos denominados vectores, junto con dos operaciones, una que recibe el nombre
Tema 3 Espacios vectoriales reales. 3.1 Espacios vectoriales. Definición 3.1 Un espacio vectorial real V es un conjunto de elementos denominados vectores, junto con dos operaciones, una que recibe el nombre
Análisis de componentes principales. a.k.a.: PCA Principal components analysis
 Análisis de componentes principales a.k.a.: PCA Principal components analysis 1 Outline Motivación Derivación Ejemplos 2 Motivación general Tenemos un dataset X con n datos y p dimensiones, centrado (medias
Análisis de componentes principales a.k.a.: PCA Principal components analysis 1 Outline Motivación Derivación Ejemplos 2 Motivación general Tenemos un dataset X con n datos y p dimensiones, centrado (medias
5 Continuidad y derivabilidad de funciones reales de varias variables reales.
 5 Continuidad y derivabilidad de funciones reales de varias variables reales. 5.1 Funciones reales de varias variables reales. Curvas de nivel. Continuidad. 5.1.1 Introducción al Análisis Matemático. El
5 Continuidad y derivabilidad de funciones reales de varias variables reales. 5.1 Funciones reales de varias variables reales. Curvas de nivel. Continuidad. 5.1.1 Introducción al Análisis Matemático. El
Tema 2 Datos multivariantes
 Aurea Grané Máster en Estadística Universidade Pedagógica 1 Aurea Grané Máster en Estadística Universidade Pedagógica 2 Tema 2 Datos multivariantes 1 Matrices de datos 2 Datos multivariantes 2 Medias,
Aurea Grané Máster en Estadística Universidade Pedagógica 1 Aurea Grané Máster en Estadística Universidade Pedagógica 2 Tema 2 Datos multivariantes 1 Matrices de datos 2 Datos multivariantes 2 Medias,
Tema de la sesión: TEMA 4 Método Direct Costing
 Aplicación: Contabilidad de Costes Tema de la sesión: TEMA 4 Método Direct Costing Nota técnica preparada por: Raúl Holgado Hermoso Fecha: 2011/2012 CARACTERÍSTICAS DEL DIRECT COSTING: 1) Distingue entre
Aplicación: Contabilidad de Costes Tema de la sesión: TEMA 4 Método Direct Costing Nota técnica preparada por: Raúl Holgado Hermoso Fecha: 2011/2012 CARACTERÍSTICAS DEL DIRECT COSTING: 1) Distingue entre
Espacios Vectoriales
 Leandro Marín Octubre 2010 Índice Definición y Ejemplos Paramétricas vs. Impĺıcitas Bases y Coordenadas Para definir un espacio vectorial tenemos que empezar determinando un cuerpo sobre el que esté definido
Leandro Marín Octubre 2010 Índice Definición y Ejemplos Paramétricas vs. Impĺıcitas Bases y Coordenadas Para definir un espacio vectorial tenemos que empezar determinando un cuerpo sobre el que esté definido
Visión artificial y Robótica Geometría. Depto. de Ciencia de la Computación e Inteligencia Artificial
 Visión artificial y Robótica Geometría Depto. de Ciencia de la Computación e Inteligencia Artificial Contenidos Geometría 2D y 3D Transformación de coordenadas Calibración de la cámara Álgebra necesaria
Visión artificial y Robótica Geometría Depto. de Ciencia de la Computación e Inteligencia Artificial Contenidos Geometría 2D y 3D Transformación de coordenadas Calibración de la cámara Álgebra necesaria
Ecuaciones Lineales en Dos Variables
 Ecuaciones Lineales en Dos Variables Una ecuación lineal en dos variables tiene la forma general a + b + c = 0; donde a, b, c representan números reales las tres no pueden ser iguales a cero a la misma
Ecuaciones Lineales en Dos Variables Una ecuación lineal en dos variables tiene la forma general a + b + c = 0; donde a, b, c representan números reales las tres no pueden ser iguales a cero a la misma
Proyecto. Tema 6 sesión 2: Generación de Rectas, Circunferencias y Curvas. Geometría Analítica. Isidro Huesca Zavaleta
 Geometría Analítica Tema 6 sesión 2: Generación de Rectas, Circunferencias y Curvas Isidro Huesca Zavaleta La Integración de dos Ciencias La Geometría Analítica nació de la integración de dos ciencias
Geometría Analítica Tema 6 sesión 2: Generación de Rectas, Circunferencias y Curvas Isidro Huesca Zavaleta La Integración de dos Ciencias La Geometría Analítica nació de la integración de dos ciencias
ECUACIÓN DE LA RECTA. 6. Hallar la ecuación de la recta que pase por el punto A ( 1, 2) y que determina en el eje X un segmento de longitud 6.
 y que determina en el eje X un segmento de longitud 6.") ECUACIÓN DE LA RECTA 1. El ángulo de inclinación de una recta mide 53º y pasa por los puntos ( 3, n) y ( 5, 4). Hallar el valor de n. A) 1 /5 B) 8 /5 C) 1 /5 D) 8 /5 E) 7 /3. Qué tipo de triángulo es el
ECUACIÓN DE LA RECTA 1. El ángulo de inclinación de una recta mide 53º y pasa por los puntos ( 3, n) y ( 5, 4). Hallar el valor de n. A) 1 /5 B) 8 /5 C) 1 /5 D) 8 /5 E) 7 /3. Qué tipo de triángulo es el
Unidad 5: Geometría Analítica
 Unidad 5 Geometría Analítica 5. Ecuaciones de una recta Los planos y las rectas son objetos geométricos que se pueden representar mediante ecuaciones. Encontraremos la ecuación vectorial de una recta r
Unidad 5 Geometría Analítica 5. Ecuaciones de una recta Los planos y las rectas son objetos geométricos que se pueden representar mediante ecuaciones. Encontraremos la ecuación vectorial de una recta r
Descomposición en valores singulares Notas para los cursos 21 y 22 (J.L. Mancilla Aguilar)
") Valores Singulares Descomposición en valores singulares Notas para los cursos y (JL Mancilla Aguilar) Tanto los valores singulares como la descomposición en valores singulares de una matriz son conceptos
Valores Singulares Descomposición en valores singulares Notas para los cursos y (JL Mancilla Aguilar) Tanto los valores singulares como la descomposición en valores singulares de una matriz son conceptos
Formulación del problema de la ruta más corta en programación lineal
 Formulación del problema de la ruta más corta en programación lineal En esta sección se describen dos formulaciones de programación lineal para el problema de la ruta más corta. Las formulaciones son generales,
Formulación del problema de la ruta más corta en programación lineal En esta sección se describen dos formulaciones de programación lineal para el problema de la ruta más corta. Las formulaciones son generales,
DEFINICIONES TIPOS DE MATRICES DETERMINANTES Y PROPIEDADES OPERACIONES MATRICIALES INVERSA DE UNA MATRIZ SISTEMAS DE ECUACIONES
 ALGEBRA DE MATRICES DEFINICIONES TIPOS DE MATRICES DETERMINANTES Y PROPIEDADES OPERACIONES MATRICIALES INVERSA DE UNA MATRIZ SISTEMAS DE ECUACIONES DEFINICIONES 2 Las matrices y los determinantes son herramientas
ALGEBRA DE MATRICES DEFINICIONES TIPOS DE MATRICES DETERMINANTES Y PROPIEDADES OPERACIONES MATRICIALES INVERSA DE UNA MATRIZ SISTEMAS DE ECUACIONES DEFINICIONES 2 Las matrices y los determinantes son herramientas
TEMA 6 Ejercicios / 3
 TEMA 6 Ejercicios / 1 TEMA 6: RECTAS Y PLANOS EN EL ESPACIO 1. Ecuaciones de los planos cartesianos en forma vectorial, paramétrica e implícita. Ecuaciones del plano XY: Punto del plano P 0, 0, 0 Vectores
TEMA 6 Ejercicios / 1 TEMA 6: RECTAS Y PLANOS EN EL ESPACIO 1. Ecuaciones de los planos cartesianos en forma vectorial, paramétrica e implícita. Ecuaciones del plano XY: Punto del plano P 0, 0, 0 Vectores
Geometría del Espacio. Física Geográfica. Licenciatura de Humanidades. Febrero-Mayo,
 Geometría del Espacio. Física Geográfica. Licenciatura de Humanidades. Febrero-Mayo, 2007. 42 Índice. 1. Superficies. 2. El espacio eucĺıdeo tridimensional. Coordenadas Cartesianas. 3. Distancia entre
Geometría del Espacio. Física Geográfica. Licenciatura de Humanidades. Febrero-Mayo, 2007. 42 Índice. 1. Superficies. 2. El espacio eucĺıdeo tridimensional. Coordenadas Cartesianas. 3. Distancia entre
Álgebra Lineal Ma1010
 Álgebra Lineal Ma1010 Líneas y s en el Espacio Departamento de Matemáticas ITESM Líneas y s en el Espacio Álgebra Lineal - p. 1/34 Los conjuntos solución a un sistema de ecuaciones lineales cuando tienen
Álgebra Lineal Ma1010 Líneas y s en el Espacio Departamento de Matemáticas ITESM Líneas y s en el Espacio Álgebra Lineal - p. 1/34 Los conjuntos solución a un sistema de ecuaciones lineales cuando tienen
La representación gráfica de una función cuadrática es una parábola.
 Función Cuadrática A la función polinómica de segundo grado +bx+c, siendo a, b, c números reales y, se la denomina función cuadrática. Los términos de la función reciben los siguientes nombres: La representación
Función Cuadrática A la función polinómica de segundo grado +bx+c, siendo a, b, c números reales y, se la denomina función cuadrática. Los términos de la función reciben los siguientes nombres: La representación
15. Regresión lineal. Te recomiendo visitar su página de apuntes y vídeos:
 15. Regresión lineal Este tema, prácticamente íntegro, está calacado de los excelentes apuntes y transparencias de Bioestadística del profesor F.J. Barón López de la Universidad de Málaga. Te recomiendo
15. Regresión lineal Este tema, prácticamente íntegro, está calacado de los excelentes apuntes y transparencias de Bioestadística del profesor F.J. Barón López de la Universidad de Málaga. Te recomiendo
Tema 1: Matrices. El concepto de matriz alcanza múltiples aplicaciones tanto en la representación y manipulación de datos como en el cálculo numérico.
 Tema 1: Matrices El concepto de matriz alcanza múltiples aplicaciones tanto en la representación y manipulación de datos como en el cálculo numérico. 1. Terminología Comenzamos con la definición de matriz
Tema 1: Matrices El concepto de matriz alcanza múltiples aplicaciones tanto en la representación y manipulación de datos como en el cálculo numérico. 1. Terminología Comenzamos con la definición de matriz
Teoría de la decisión
 1.- Un problema estadístico típico es reflejar la relación entre dos variables, a partir de una serie de Observaciones: Por ejemplo: * peso adulto altura / peso adulto k*altura * relación de la circunferencia
1.- Un problema estadístico típico es reflejar la relación entre dos variables, a partir de una serie de Observaciones: Por ejemplo: * peso adulto altura / peso adulto k*altura * relación de la circunferencia
Matriz inversa generalizada y descomposición del valor singular
 Matriz inversa generalizada y descomposición del valor singular Divulgación Fernando Velasco Luna y Jesús Hernández Suárez Laboratorio de Investigación y Asesoría Estadística, Facultad de Estadística e
Matriz inversa generalizada y descomposición del valor singular Divulgación Fernando Velasco Luna y Jesús Hernández Suárez Laboratorio de Investigación y Asesoría Estadística, Facultad de Estadística e
Clase 10: Extremos condicionados y multiplicadores de Lagrange
 Clase 10: Extremos condicionados y multiplicadores de Lagrange C.J. Vanegas 7 de abril de 008 1. Extremos condicionados y multiplicadores de Lagrange Estamos interesados en maximizar o minimizar una función
Clase 10: Extremos condicionados y multiplicadores de Lagrange C.J. Vanegas 7 de abril de 008 1. Extremos condicionados y multiplicadores de Lagrange Estamos interesados en maximizar o minimizar una función
Trabajo Práctico N 5: ESPACIOS VECTORIALES. Ejercicio 1:
 6 Trabajo Práctico N 5: ESPACIOS VECTORIALES Ejercicio : Determine si los siguientes conjuntos con las operaciones definidas en cada caso son o no espacios vectoriales. Para aquellos que no lo sean, indique
6 Trabajo Práctico N 5: ESPACIOS VECTORIALES Ejercicio : Determine si los siguientes conjuntos con las operaciones definidas en cada caso son o no espacios vectoriales. Para aquellos que no lo sean, indique
FUNCIONES Y GRÁFICAS
 FUNCIONES Y GRÁFICAS Material de clase INTRODUCCIÓN: EJEMPLOS Una función es una correspondencia (relación) entre dos conjuntos (magnitudes ), de forma que a cada elemento (objeto) del primer conjunto
FUNCIONES Y GRÁFICAS Material de clase INTRODUCCIÓN: EJEMPLOS Una función es una correspondencia (relación) entre dos conjuntos (magnitudes ), de forma que a cada elemento (objeto) del primer conjunto
Clase 8 Matrices Álgebra Lineal
 Clase 8 Matrices Álgebra Lineal Código Escuela de Matemáticas - Facultad de Ciencias Universidad Nacional de Colombia Matrices Definición Una matriz es un arreglo rectangular de números denominados entradas
Clase 8 Matrices Álgebra Lineal Código Escuela de Matemáticas - Facultad de Ciencias Universidad Nacional de Colombia Matrices Definición Una matriz es un arreglo rectangular de números denominados entradas
Descomposición en forma canónica de Jordan (Segunda versión)
") Descomposición en forma canónica de Jordan (Segunda versión) Francisco J. Bravo S. 1 de septiembre de 211 En esta guía se presentan los resultados necesarios para poder construir la forma de Jordan sin
Descomposición en forma canónica de Jordan (Segunda versión) Francisco J. Bravo S. 1 de septiembre de 211 En esta guía se presentan los resultados necesarios para poder construir la forma de Jordan sin
FUNCIONES y = f(x) ESO3
 ESO3") Las correspondencias entre conjunto de valores o magnitudes se pueden expresar de varias formas: con un enunciado, con una tabla, con una gráfica, o con una fórmula o expresión algebraica o analítica.
Las correspondencias entre conjunto de valores o magnitudes se pueden expresar de varias formas: con un enunciado, con una tabla, con una gráfica, o con una fórmula o expresión algebraica o analítica.
Problemas de exámenes de Geometría
 1 Problemas de exámenes de Geometría 1. Consideramos los planos π 1 : X = P+λ 1 u 1 +λ 2 u 2 y π 2 : X = Q+µ 1 v 1 +µ 2 v 2. Cuál de las siguientes afirmaciones es incorrecta? a) Si π 1 π 2 Ø, entonces
1 Problemas de exámenes de Geometría 1. Consideramos los planos π 1 : X = P+λ 1 u 1 +λ 2 u 2 y π 2 : X = Q+µ 1 v 1 +µ 2 v 2. Cuál de las siguientes afirmaciones es incorrecta? a) Si π 1 π 2 Ø, entonces
PROGRAMA DE CURSO. Resultados de Aprendizaje
 PROGRAMA DE CURSO Código Nombre MA1102 Algebra Lineal Nombre en Inglés Linear Algebra SCT es Horas de Horas Docencia Horas de Trabajo Docentes Cátedra Auxiliar Personal 6 10 3,0 2,0 5,0 Requisitos MA1101
PROGRAMA DE CURSO Código Nombre MA1102 Algebra Lineal Nombre en Inglés Linear Algebra SCT es Horas de Horas Docencia Horas de Trabajo Docentes Cátedra Auxiliar Personal 6 10 3,0 2,0 5,0 Requisitos MA1101
Tema 4: Matrices y Determinantes. Algunas Notas sobre Matrices y Determinantes. Álgebra Lineal. Curso
 Tema 4: Matrices y Determinantes Algunas Notas sobre Matrices y Determinantes Álgebra Lineal Curso 2004-2005 Prof. Manu Vega Índice 1. Determinantes 3 2. Regla de Sarrus 3 3. Propiedades de los determinantes
Tema 4: Matrices y Determinantes Algunas Notas sobre Matrices y Determinantes Álgebra Lineal Curso 2004-2005 Prof. Manu Vega Índice 1. Determinantes 3 2. Regla de Sarrus 3 3. Propiedades de los determinantes
Universidad Alonso de Ojeda. Facultad de Ingeniería GUIA DE ESTUDIO ALGEBRA LINEAL.
 UNIDAD IV: VECTORES EN R2 Y R3 VECTOR Se puede considerar un vector como un segmento de recta con una flecha en uno de sus extremos. De esta forma lo podemos distinguir por cuatro partes fundamentales:
UNIDAD IV: VECTORES EN R2 Y R3 VECTOR Se puede considerar un vector como un segmento de recta con una flecha en uno de sus extremos. De esta forma lo podemos distinguir por cuatro partes fundamentales:
FUNDAMENTOS DEL ÁLGEBRA. Folleto De Trabajo Para La Clase ECUACIONES LINEALES EN DOS VARIABLES
 FUNDAMENTOS DEL ÁLGEBRA Folleto De Trabajo Para La Clase ECUACIONES LINEALES EN DOS VARIABLES NOMBRE ID SECCIÓN SALÓN Prof. Eveln Dávila Contenido TEMA: Ecuaciones Lineales En Dos Variables... Solución
FUNDAMENTOS DEL ÁLGEBRA Folleto De Trabajo Para La Clase ECUACIONES LINEALES EN DOS VARIABLES NOMBRE ID SECCIÓN SALÓN Prof. Eveln Dávila Contenido TEMA: Ecuaciones Lineales En Dos Variables... Solución
Espacios Vectoriales www.math.com.mx
 Espacios Vectoriales Definiciones básicas de Espacios Vectoriales www.math.com.mx José de Jesús Angel Angel jjaa@math.com.mx MathCon c 007-009 Contenido. Espacios Vectoriales.. Idea Básica de Espacio Vectorial.................................
Espacios Vectoriales Definiciones básicas de Espacios Vectoriales www.math.com.mx José de Jesús Angel Angel jjaa@math.com.mx MathCon c 007-009 Contenido. Espacios Vectoriales.. Idea Básica de Espacio Vectorial.................................
EJERCICIOS DE ÁLGEBRA LINEAL TEMA 1 ESPACIOS VECTORIALES
 EJERCICIOS DE ÁLGEBRA LINEAL TEMA ESPACIOS VECTORIALES Formas reducidas y escalonada de una matriz SISTEMAS DE ECUACIONES LINEALES ) Encuentre una sucesión de matrices elementales E, E,..., E k tal que
EJERCICIOS DE ÁLGEBRA LINEAL TEMA ESPACIOS VECTORIALES Formas reducidas y escalonada de una matriz SISTEMAS DE ECUACIONES LINEALES ) Encuentre una sucesión de matrices elementales E, E,..., E k tal que
son dos elementos de Rⁿ, definimos su suma, denotada por
 1.1 Definición de un vector en R², R³ y su Interpretación geométrica. 1.2 Introducción a los campos escalares y vectoriales. 1.3 La geometría de las operaciones vectoriales. 1.4 Operaciones con vectores
1.1 Definición de un vector en R², R³ y su Interpretación geométrica. 1.2 Introducción a los campos escalares y vectoriales. 1.3 La geometría de las operaciones vectoriales. 1.4 Operaciones con vectores
3. Selección y Extracción de características. Selección: Extracción: -PCA -NMF
 3. Selección y Extracción de características Selección: - óptimos y subóptimos Extracción: -PCA - LDA - ICA -NMF 1 Selección de Características Objetivo: Seleccionar un conjunto de p variables a partir
3. Selección y Extracción de características Selección: - óptimos y subóptimos Extracción: -PCA - LDA - ICA -NMF 1 Selección de Características Objetivo: Seleccionar un conjunto de p variables a partir
Localizando pares ordenados
 DMINI DE ÁLGEBRA: Curso I MÓDUL 2: Ecuaciones funciones lineales Localizando pares ordenados Realiza las siguientes actividades, mientras trabajas con el tutorial.. La recta numérica horizontal se conoce
DMINI DE ÁLGEBRA: Curso I MÓDUL 2: Ecuaciones funciones lineales Localizando pares ordenados Realiza las siguientes actividades, mientras trabajas con el tutorial.. La recta numérica horizontal se conoce
ALGEBRA. Escuela Politécnica Superior de Málaga
 ALGEBRA. Escuela Politécnica Superior de Málaga Tema 1. Espacios Vectoriales. Sistemas de ecuaciones. Espacio vectorial. Espacios vectoriales R n. Dependencia e independencia lineal. Base. Matrices y determinantes.
ALGEBRA. Escuela Politécnica Superior de Málaga Tema 1. Espacios Vectoriales. Sistemas de ecuaciones. Espacio vectorial. Espacios vectoriales R n. Dependencia e independencia lineal. Base. Matrices y determinantes.
Modelización por medio de sistemas
 SISTEMAS DE ECUACIONES DIFERENCIALES LINEALES. Modelización por medio de sistemas d y dy Ecuaciones autónomas de segundo orden: = f ( y, ) Una variable independiente. Una variable dependiente. La variable
SISTEMAS DE ECUACIONES DIFERENCIALES LINEALES. Modelización por medio de sistemas d y dy Ecuaciones autónomas de segundo orden: = f ( y, ) Una variable independiente. Una variable dependiente. La variable
TRA NSFORMACIO N ES LIN EA LES
 TRA NSFORMACIO N ES LIN EA LES C o m p uta c i ó n G r á fica Tipos de Datos Geométricos T Un punto se puede representar con tres números reales [x,y,z] que llamaremos vector coordenado. Los números especifican
TRA NSFORMACIO N ES LIN EA LES C o m p uta c i ó n G r á fica Tipos de Datos Geométricos T Un punto se puede representar con tres números reales [x,y,z] que llamaremos vector coordenado. Los números especifican
Esta expresión polinómica puede expresarse como una expresión matricial de la forma; a 11 a 12 a 1n x 1 x 2 q(x 1, x 2,, x n ) = (x 1, x 2,, x n )
 = (x 1, x 2,, x n )") Tema 3 Formas cuadráticas. 3.1. Definición y expresión matricial Definición 3.1.1. Una forma cuadrática sobre R es una aplicación q : R n R que a cada vector x = (x 1, x 2,, x n ) R n le hace corresponder
Tema 3 Formas cuadráticas. 3.1. Definición y expresión matricial Definición 3.1.1. Una forma cuadrática sobre R es una aplicación q : R n R que a cada vector x = (x 1, x 2,, x n ) R n le hace corresponder
Capítulo 8. Análisis Discriminante
 Capítulo 8 Análisis Discriminante Técnica de clasificación donde el objetivo es obtener una función capaz de clasificar a un nuevo individuo a partir del conocimiento de los valores de ciertas variables
Capítulo 8 Análisis Discriminante Técnica de clasificación donde el objetivo es obtener una función capaz de clasificar a un nuevo individuo a partir del conocimiento de los valores de ciertas variables
EJERCICIOS DE SELECTIVIDAD DE GEOMETRIA
 EJERCICIOS DE SELECTIVIDAD DE GEOMETRIA 2003 (4) Ejercicio 1. Considera los vectores u = (1,1,1), v = (2,2,a) y w = (2,0,0), (a) [1'25 puntos] Halla los valores de a para que los vectores u, v y w sean
EJERCICIOS DE SELECTIVIDAD DE GEOMETRIA 2003 (4) Ejercicio 1. Considera los vectores u = (1,1,1), v = (2,2,a) y w = (2,0,0), (a) [1'25 puntos] Halla los valores de a para que los vectores u, v y w sean
ÁLGEBRA VECTORIAL Y MATRICES. Ciclo 02 de Circunferencia.
 ÁLGEBRA VECTORIAL Y MATRICES. Ciclo 02 de 2012. Circunferencia. Elementos de la circunferencia. El segmento de recta es una cuerda. El segmento de recta es una cuerda que pasa por el centro, por lo tanto
ÁLGEBRA VECTORIAL Y MATRICES. Ciclo 02 de 2012. Circunferencia. Elementos de la circunferencia. El segmento de recta es una cuerda. El segmento de recta es una cuerda que pasa por el centro, por lo tanto
PAIEP. Complemento Ortogonal
 Programa de Acceso Inclusivo, Equidad y Permanencia PAIEP Universidad de Santiago de Chile Complemento Ortogonal Veamos ahora una aplicación de los vectores ortogonales a la caracterización de subespacios
Programa de Acceso Inclusivo, Equidad y Permanencia PAIEP Universidad de Santiago de Chile Complemento Ortogonal Veamos ahora una aplicación de los vectores ortogonales a la caracterización de subespacios
TEMA 1: NÚMEROS REALES
 . Numeros racionales Ejemplo: TEMA : NÚMEROS REALES 4.............................................. Entonces puedo expresar el "" de infinitas formas, siendo su fracción generatriz la que es irreducible.
. Numeros racionales Ejemplo: TEMA : NÚMEROS REALES 4.............................................. Entonces puedo expresar el "" de infinitas formas, siendo su fracción generatriz la que es irreducible.
VARIABLES ESTADÍSTICAS BIDIMENSIONALES
 VARIABLES ESTADÍSTICAS BIDIMENSIONALES 1.- En una variable estadística bidimensional, el diagrama de dispersión representa: a) la nube de puntos. b) las varianzas de las dos variables. c) los coeficientes
VARIABLES ESTADÍSTICAS BIDIMENSIONALES 1.- En una variable estadística bidimensional, el diagrama de dispersión representa: a) la nube de puntos. b) las varianzas de las dos variables. c) los coeficientes
Conjuntos y funciones convexas
 Conjuntos y funciones convexas Un conjunto X R n se dice convexo si para todo par de puntos x 1 y x 2 en X, λ x 1 + ( 1- λ) x 2 X, para todo λ [0,1] Qué significa esto geométricamente? Un punto λ x 1 +
Conjuntos y funciones convexas Un conjunto X R n se dice convexo si para todo par de puntos x 1 y x 2 en X, λ x 1 + ( 1- λ) x 2 X, para todo λ [0,1] Qué significa esto geométricamente? Un punto λ x 1 +
Tema 2: Vectores libres
 Tema 2: Vectores libres FISICA I, 1º Grado en Ingeniería Aeroespacial Escuela Técnica Superior de Ingeniería Universidad de Sevilla 1 Índice Magnitudes escalares y vectoriales Definición de vector Vectores
Tema 2: Vectores libres FISICA I, 1º Grado en Ingeniería Aeroespacial Escuela Técnica Superior de Ingeniería Universidad de Sevilla 1 Índice Magnitudes escalares y vectoriales Definición de vector Vectores
PROBLEMAS RESUELTOS SELECTIVIDAD ANDALUCÍA 2009 MATEMÁTICAS II TEMA 3: ESPACIO AFIN Y EUCLIDEO
 PROBLEMAS RESUELTOS SELECTIVIDAD ANDALUCÍA 2009 MATEMÁTICAS II TEMA 3: ESPACIO AFIN Y EUCLIDEO Junio, Ejercicio 4, Opción A Junio, Ejercicio 4, Opción B Reserva 1, Ejercicio 4, Opción A Reserva 1, Ejercicio
PROBLEMAS RESUELTOS SELECTIVIDAD ANDALUCÍA 2009 MATEMÁTICAS II TEMA 3: ESPACIO AFIN Y EUCLIDEO Junio, Ejercicio 4, Opción A Junio, Ejercicio 4, Opción B Reserva 1, Ejercicio 4, Opción A Reserva 1, Ejercicio
Sistemas de Ecuaciones Lineales y Matrices
 Capítulo 4 Sistemas de Ecuaciones Lineales y Matrices El problema central del Álgebra Lineal es la resolución de ecuaciones lineales simultáneas Una ecuación lineal con n-incógnitas x 1, x 2,, x n es una
Capítulo 4 Sistemas de Ecuaciones Lineales y Matrices El problema central del Álgebra Lineal es la resolución de ecuaciones lineales simultáneas Una ecuación lineal con n-incógnitas x 1, x 2,, x n es una
En la notación C(3) se indica el valor de la cuenta para 3 kilowatts-hora: C(3) = 60 (3) = 1.253
 se indica el valor de la cuenta para 3 kilowatts-hora: C(3) = 60 (3) = 1.253") Eje temático: Álgebra y funciones Contenidos: Operatoria con expresiones algebraicas Nivel: 2 Medio Funciones 1. Funciones En la vida diaria encontramos situaciones en las que aparecen valores que varían
Eje temático: Álgebra y funciones Contenidos: Operatoria con expresiones algebraicas Nivel: 2 Medio Funciones 1. Funciones En la vida diaria encontramos situaciones en las que aparecen valores que varían
TEMA 8: FUNCIONES. Primer Curso de Educación Secundaria Obligatoria. I.e.s. Fuentesaúco.
 2009 TEMA 8: FUNCIONES. Primer Curso de Educación Secundaria Obligatoria. I.e.s. Fuentesaúco. Manuel González de León. mgdl 01/01/2009 1º E.S.O. TEMA 08: Funciones. TEMA 08: FUNCIONES. 1. Correspondencia.
2009 TEMA 8: FUNCIONES. Primer Curso de Educación Secundaria Obligatoria. I.e.s. Fuentesaúco. Manuel González de León. mgdl 01/01/2009 1º E.S.O. TEMA 08: Funciones. TEMA 08: FUNCIONES. 1. Correspondencia.
INTRODUCCIÓN AL ANÁLISIS DE DATOS ORIENTACIONES (TEMA Nº 7)
") TEMA Nº 7 DISTRIBUCIONES CONTINUAS DE PROBABILIDAD OBJETIVOS DE APRENDIZAJE: Conocer las características de la distribución normal como distribución de probabilidad de una variable y la aproximación de
TEMA Nº 7 DISTRIBUCIONES CONTINUAS DE PROBABILIDAD OBJETIVOS DE APRENDIZAJE: Conocer las características de la distribución normal como distribución de probabilidad de una variable y la aproximación de
FUNCIÓN LINEAL FUNCIÓN CONSTANTE - RELACIÓN LINEAL
 FUNCIÓN LINEAL FUNCIÓN CONSTANTE - RELACIÓN LINEAL ) a) Determine pendiente, ordenada al origen y abscisa al origen, si es posible. b) Grafique. -) a) y = ( x ) aplicando propiedad distributiva y= x se
FUNCIÓN LINEAL FUNCIÓN CONSTANTE - RELACIÓN LINEAL ) a) Determine pendiente, ordenada al origen y abscisa al origen, si es posible. b) Grafique. -) a) y = ( x ) aplicando propiedad distributiva y= x se
Curva de Lorenz e Indice de Gini Curva de Lorenz
 Curva de Lorenz e Indice de Gini Curva de Lorenz La curva de Lorenz es útil para demostrar la diferencia entre dos distribuciones: por ejemplo quantiles de población contra quantiles de ingresos. También
Curva de Lorenz e Indice de Gini Curva de Lorenz La curva de Lorenz es útil para demostrar la diferencia entre dos distribuciones: por ejemplo quantiles de población contra quantiles de ingresos. También
MATEMÁTICAS 1º BACH. C. N. Y S. 25 de enero de 2010 Geometría y Logaritmos
 MATEMÁTICAS 1º BACH. C. N. Y S. 5 de enero de 010 Geometría y Logaritmos x yz 1) Tomar logaritmos, y desarrollar, en la siguiente expresión: A 4 ab log x log b 4log a log y ) Quitar logaritmos: log A )
MATEMÁTICAS 1º BACH. C. N. Y S. 5 de enero de 010 Geometría y Logaritmos x yz 1) Tomar logaritmos, y desarrollar, en la siguiente expresión: A 4 ab log x log b 4log a log y ) Quitar logaritmos: log A )
Tema 11.- Autovalores y Autovectores.
 Álgebra 004-005 Ingenieros Industriales Departamento de Matemática Aplicada II Universidad de Sevilla Tema - Autovalores y Autovectores Definición, propiedades e interpretación geométrica La ecuación característica
Álgebra 004-005 Ingenieros Industriales Departamento de Matemática Aplicada II Universidad de Sevilla Tema - Autovalores y Autovectores Definición, propiedades e interpretación geométrica La ecuación característica
Instituto de Física Universidad de Guanajuato Agosto 2007
 Instituto de Física Universidad de Guanajuato Agosto 2007 Física III Capítulo I José Luis Lucio Martínez El material que se presenta en estas notas se encuentra, en su mayor parte, en las referencias que
Instituto de Física Universidad de Guanajuato Agosto 2007 Física III Capítulo I José Luis Lucio Martínez El material que se presenta en estas notas se encuentra, en su mayor parte, en las referencias que
DISEÑO CURRICULAR ALGEBRA LINEAL
 DISEÑO CURRICULAR ALGEBRA LINEAL FACULTAD (ES) CARRERA (S) Ingeniería Computación y Sistemas CÓDIGO HORAS TEÓRICAS HORAS PRÁCTICAS UNIDADES DE CRÉDITO SEMESTRE 122443 02 02 03 II PRE-REQUISITO ELABORADO
DISEÑO CURRICULAR ALGEBRA LINEAL FACULTAD (ES) CARRERA (S) Ingeniería Computación y Sistemas CÓDIGO HORAS TEÓRICAS HORAS PRÁCTICAS UNIDADES DE CRÉDITO SEMESTRE 122443 02 02 03 II PRE-REQUISITO ELABORADO
Repaso de funciones exponenciales y logarítmicas. Review of exponential and logarithmic functions
 Repaso de funciones exponenciales y logarítmicas Review of exponential and logarithmic functions Las funciones lineales, cuadráticas, polinómicas y racionales se conocen como funciones algebraicas. Las
Repaso de funciones exponenciales y logarítmicas Review of exponential and logarithmic functions Las funciones lineales, cuadráticas, polinómicas y racionales se conocen como funciones algebraicas. Las
Matrices y determinantes
 Matrices y determinantes 1 Ejemplo Cuál es el tamaño de las siguientes matrices? Cuál es el elemento a 21, b 23, c 42? 2 Tipos de matrices Matriz renglón o vector renglón Matriz columna o vector columna
Matrices y determinantes 1 Ejemplo Cuál es el tamaño de las siguientes matrices? Cuál es el elemento a 21, b 23, c 42? 2 Tipos de matrices Matriz renglón o vector renglón Matriz columna o vector columna
NOTACIÓN Y REPRESENTACIÓN
 TEORÍA NÚMEROS COMPLEJOS DEFINICIÓN: Los números complejos son el conjunto de todos los números reales e imaginarios. Surgen de la necesidad de expresar la raíz par de un número negativo. APLICACIÓN: Los
TEORÍA NÚMEROS COMPLEJOS DEFINICIÓN: Los números complejos son el conjunto de todos los números reales e imaginarios. Surgen de la necesidad de expresar la raíz par de un número negativo. APLICACIÓN: Los
SESIÓN PRÁCTICA 7: REGRESION LINEAL SIMPLE PROBABILIDAD Y ESTADÍSTICA. PROF. Esther González Sánchez. Departamento de Informática y Sistemas
 SESIÓN PRÁCTICA 7: REGRESION LINEAL SIMPLE PROBABILIDAD Y ESTADÍSTICA PROF. Esther González Sánchez Departamento de Informática y Sistemas Facultad de Informática Universidad de Las Palmas de Gran Canaria
SESIÓN PRÁCTICA 7: REGRESION LINEAL SIMPLE PROBABILIDAD Y ESTADÍSTICA PROF. Esther González Sánchez Departamento de Informática y Sistemas Facultad de Informática Universidad de Las Palmas de Gran Canaria
Herramientas digitales de auto-aprendizaje para Matemáticas
 real de con Herramientas digitales de auto-aprendizaje para Matemáticas, Grupo de Innovación Didáctica Departamento de Matemáticas Universidad de Extremadura real de con Índice real de con real de con.
real de con Herramientas digitales de auto-aprendizaje para Matemáticas, Grupo de Innovación Didáctica Departamento de Matemáticas Universidad de Extremadura real de con Índice real de con real de con.
Coordenadas de un punto
 Coordenadas de un punto En esta sección iniciamos con las definiciones de algunos conceptos básicos sobre los cuales descansan todos los demás conceptos que utilizaremos a lo largo del curso. Ejes Coordenados
Coordenadas de un punto En esta sección iniciamos con las definiciones de algunos conceptos básicos sobre los cuales descansan todos los demás conceptos que utilizaremos a lo largo del curso. Ejes Coordenados
Derivadas Parciales (parte 2)
") 40 Derivadas Parciales (parte 2) Ejercicio: Si donde y. Determinar Solución: Consideraremos ahora la situación en la que, pero cada una de las variables e es función de dos variables y. En este caso tiene
40 Derivadas Parciales (parte 2) Ejercicio: Si donde y. Determinar Solución: Consideraremos ahora la situación en la que, pero cada una de las variables e es función de dos variables y. En este caso tiene
Derivada de una función en un punto. Función derivada. Diferencial de una función en un punto. dy = f (x) dx. Derivada de la función inversa
 dx. Derivada de la función inversa") Derivada de una función en un punto Las tres expresiones son equivalentes. En definitiva, la derivada de una función en un punto se obtiene como el límite del cociente incremental: el incremento del valor
Derivada de una función en un punto Las tres expresiones son equivalentes. En definitiva, la derivada de una función en un punto se obtiene como el límite del cociente incremental: el incremento del valor
Estadís5ca. María Dolores Frías Domínguez Jesús Fernández Fernández Carmen María Sordo. Tema 2. Modelos de regresión
 Estadís5ca Tema 2. Modelos de regresión María Dolores Frías Domínguez Jesús Fernández Fernández Carmen María Sordo Departamento de Matemá.ca Aplicada y Ciencias de la Computación Este tema se publica bajo
Estadís5ca Tema 2. Modelos de regresión María Dolores Frías Domínguez Jesús Fernández Fernández Carmen María Sordo Departamento de Matemá.ca Aplicada y Ciencias de la Computación Este tema se publica bajo
Colegio Universitario Boston
 Función Lineal. Si f función polinomial de la forma o, donde y son constantes reales se considera una función lineal, en esta nos la pendiente o sea la inclinación que tendrá la gráfica de la función,
Función Lineal. Si f función polinomial de la forma o, donde y son constantes reales se considera una función lineal, en esta nos la pendiente o sea la inclinación que tendrá la gráfica de la función,
m=0 La ecuación de una recta se puede obtener a partir de dos puntos por los que pase la recta: y y1 = m(x x1)
") Recta Una propiedad importante de la recta es su pendiente. Para determinar este coeficiente m en una recta que no sea vertical, basta tener dos puntos (, y) & (, y) que estén sobre la recta, la pendiente
Recta Una propiedad importante de la recta es su pendiente. Para determinar este coeficiente m en una recta que no sea vertical, basta tener dos puntos (, y) & (, y) que estén sobre la recta, la pendiente
PARÁBOLA IX.
 IX. PARÁBOLA Lugar geométrico de todos los puntos tales que la distancia de éstos a un punto fijo (foco) es siempre la misma a una recta fija (directriz). p = distancia del vértice al foco o del vértice
IX. PARÁBOLA Lugar geométrico de todos los puntos tales que la distancia de éstos a un punto fijo (foco) es siempre la misma a una recta fija (directriz). p = distancia del vértice al foco o del vértice
Espacios vectoriales. Ortogonalizacioón de Gram Schmidt
 Espacios_Vectoriales.nb Espacios vectoriales. Ortogonalizacioón de Gram Schmidt Práctica de Álgebra Lineal, E.U.A.T., Curso 00 00 En esta práctica se explica cómo resolver con Mathematica algunos problemas
Espacios_Vectoriales.nb Espacios vectoriales. Ortogonalizacioón de Gram Schmidt Práctica de Álgebra Lineal, E.U.A.T., Curso 00 00 En esta práctica se explica cómo resolver con Mathematica algunos problemas
12 Funciones de proporcionalidad
 8 _ 09-088.qxd //0 : Página 9 Funciones de proporcionalidad INTRODUCCIÓN La representación gráfica de funciones de proporcionalidad es una de las formas más directas de entender y verificar la relación
8 _ 09-088.qxd //0 : Página 9 Funciones de proporcionalidad INTRODUCCIÓN La representación gráfica de funciones de proporcionalidad es una de las formas más directas de entender y verificar la relación
2.2 Rectas en el plano
 2.2 Al igual que ocurre con el punto, en geometría intrínseca, el concepto de recta no tiene definición, sino que constituye otro de sus conceptos iniciales, indefinibles. Desde luego se trata de un conjunto
2.2 Al igual que ocurre con el punto, en geometría intrínseca, el concepto de recta no tiene definición, sino que constituye otro de sus conceptos iniciales, indefinibles. Desde luego se trata de un conjunto
VECTORES. también con letras sobre las cuales se coloca una flechita ( a ). A = módulo de A. modulo o magnitud, dirección y sentido. vector.
. A = módulo de A. modulo o magnitud, dirección y sentido. vector.") VECTORES Según su naturaleza las cantidades físicas se clasifican en magnitudes escalares y magnitudes vectoriales Las magnitudes como el tiempo, la temperatura, la masa y otras, son magnitudes escalares
VECTORES Según su naturaleza las cantidades físicas se clasifican en magnitudes escalares y magnitudes vectoriales Las magnitudes como el tiempo, la temperatura, la masa y otras, son magnitudes escalares
VECTORES vector Vector posición par ordenado A(a, b) representa geométricamente segmento de recta dirigido componentes del vector
 representa geométricamente segmento de recta dirigido componentes del vector") VECTORES Un vector (Vector posición) en el plano es un par ordenado de números reales A(a, b). Se representa geométricamente por un segmento de recta dirigido, cuyo punto inicial es el origen del sistema
VECTORES Un vector (Vector posición) en el plano es un par ordenado de números reales A(a, b). Se representa geométricamente por un segmento de recta dirigido, cuyo punto inicial es el origen del sistema
1.3.- V A L O R A B S O L U T O
 1.3.- V A L O R A B S O L U T O OBJETIVO.- Que el alumno conozca el concepto de Valor Absoluto y sepa emplearlo en la resolución de desigualdades. 1.3.1.- Definición de Valor Absoluto. El valor absoluto
1.3.- V A L O R A B S O L U T O OBJETIVO.- Que el alumno conozca el concepto de Valor Absoluto y sepa emplearlo en la resolución de desigualdades. 1.3.1.- Definición de Valor Absoluto. El valor absoluto
ÁLGEBRA LINEAL II Algunas soluciones a la práctica 2.3
 ÁLGEBRA LINEAL II Algunas soluciones a la práctica 2. Transformaciones ortogonales (Curso 2010 2011) 1. Se considera el espacio vectorial euclídeo IR referido a una base ortonormal. Obtener la expresión
ÁLGEBRA LINEAL II Algunas soluciones a la práctica 2. Transformaciones ortogonales (Curso 2010 2011) 1. Se considera el espacio vectorial euclídeo IR referido a una base ortonormal. Obtener la expresión
Rectas, planos e hiperplanos
 Semestre -8, Algebra Lineal 37 Rectas, planos e hiperplanos Recta P punto de la recta L, d vector no nulo de R n (vector director de la recta) X punto de la recta L PX paralelo a d (PX = td) PX = OX OP
Semestre -8, Algebra Lineal 37 Rectas, planos e hiperplanos Recta P punto de la recta L, d vector no nulo de R n (vector director de la recta) X punto de la recta L PX paralelo a d (PX = td) PX = OX OP
Álgebra y trigonometría: Gráficas de ecuaciones y funciones
 Álgebra y trigonometría: Gráficas de ecuaciones y funciones CNM-108 Instituto de Matemáticas Facultad de Ciencias Exactas y Naturales Universidad de Antioquia Este documento es distribuido bajo una licencia
Álgebra y trigonometría: Gráficas de ecuaciones y funciones CNM-108 Instituto de Matemáticas Facultad de Ciencias Exactas y Naturales Universidad de Antioquia Este documento es distribuido bajo una licencia